本文一览
1.什么是滞后补偿器以及和PI控制的联系
2.PI控制对系统的影响
1.什么是超前补偿器以及和PI控制的联系
上一篇文章提到了超前补偿器,超前这个词的含义就是相位提前,相位提前所带来的的好处就是减少振荡,加快系统的稳定。但是使用超前补偿器始终不能消除系统的静态误差,PD控制也是一种特殊的超前补偿器,所以仅仅使用PD控制无法消除系统的静态误差。这是上一篇文章我们讲过的内容,不清楚的达瓦里氏可以去阅读我的上一篇博文:从控制理论的根轨迹法和稳定性分析谈到舵机PD控制代码实现,下面我们来谈谈滞后补偿器,滞后补偿器就是能让系统相位滞后的补偿器,讲完了,嘿嘿!这时候你心理活动肯定是:给爷爬,还用你说!,好了,不闹了,直接进入正题,我们来看一个系统:
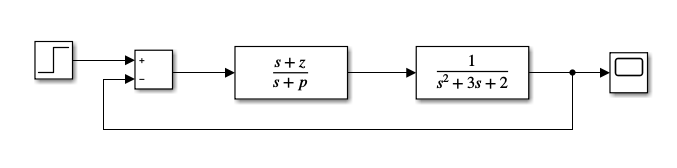
有了上一章的基础,我们知道如果|z|<|p|为超前补偿器,那如果|z|>|p|怎么说呢,自然而然就会想到滞后补偿器。下面通过bode来验证一下:
%设z等于8,p等于2
num=[1 8];
den=[1 2];
sys=tf(num,den);
bode(sys);
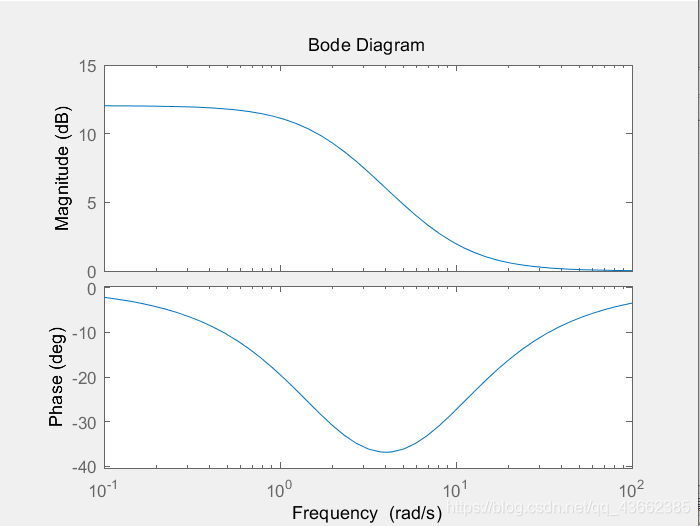
上图表示当z=8,p=2时,可以看出相位是滞后的,而且从幅频特性来看,具有低通滤波器的性质。
%设z等于2,p等于8
num=[1 2];
den=[1 8];
sys=tf(num,den);
bode(sys);
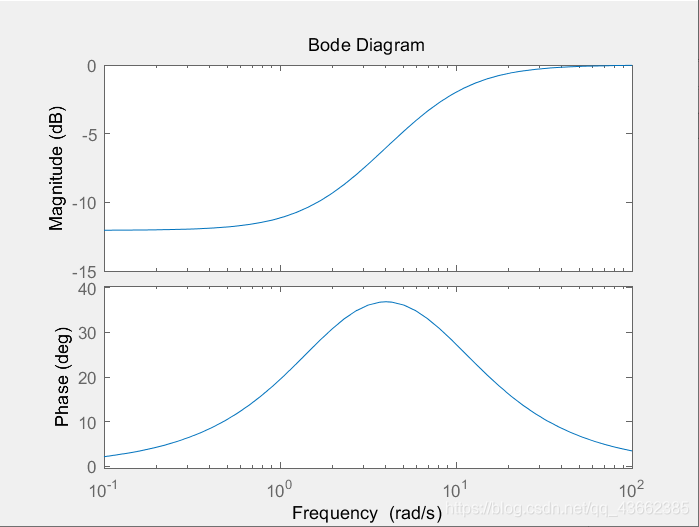
上图表示当z=2,p=8时,可以看出相位是超前的,而且从幅频特性来看,具有高通滤波器的性质。想想也是,你这一个超前补偿器其实就是不完全微分的PD控制,自然是信号要有变化才能利用到D项,如果信号不变,误差不变,D项为0,那么相当于几乎没有通过这个控制器,相当于被滤除掉了。那个下次有机会好好讲讲FIR(有限脉冲响应滤波器)滤波器的知识,虽然不是相关专业的,但是想要成为一个优秀的机电工程师,这还是必须掌握的。
闲话不多说,来看!当滞后补偿器的p变为0时,转化为:

这是什么,这就是一个PI控制器啊,所以PI控制器就是一个特殊的滞后补偿器。是不是和超前补偿器以及PD控制有一种对称的美感。
既然我们知道了滞后补偿器的特性是低通,相位滞后,那么它到底能为我们的系统带来什么。收了钱要办事啊!
2.PI控制对系统的影响
冲上来就说结论,然后再用数学方法论证,这是老师上课交给我写论文的方法。
结论:PI控制对系统的最大的影响就是能够消除静态误差,其他的先不谈,摆出一个系统:
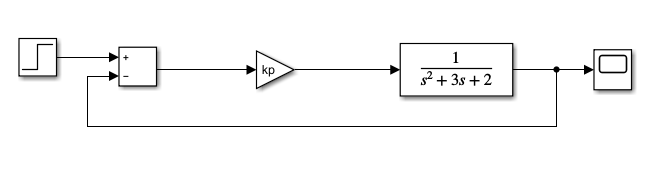
基于生物学中的对照原则,还是拿纯比例控制来当做背景板,纯比例控制的闭环传递函数为:

基于终值定理:

当s趋近于0时,t趋近于无穷,所以:
所以存在静态误差为1-y(t):
可以看出,纯比例控制时无法消除静态误差的,除非你的kp无限大,当然,这是做不到的,在现实工业环境中,一般你的PID输出会最终对应到电压,请问哪里去找电压无限大的电源,这也为后面抗积分饱和埋下了伏笔,在上一篇文章中也提到了PD控制也不能完全消除静态误差。
既然他们俩都不行,那就看看PI控制器吧:
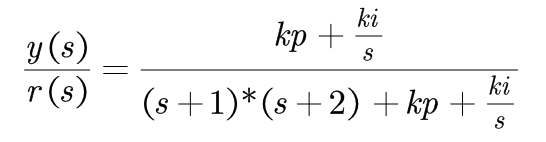
当输入r(t)为阶跃输入时由终值定理可得:

当s=0时,上式可得有y(t->∞)=1,所以此时的静态误差为0,从而可以证明PI控制是可以将静态误差减小到0的,这是PI控制器对系统最大的贡献,当然还有一个影响就是在纯比例控制下加入积分控制后,系统的响应速度确实也会加快,但会带来一定的超调量,我们通过最开始提到的那个系统来验证一下这三个性质:
1.消除静态误差
2.响应速度加快
3.增加超调量,且ki越大,超调量越大。
上图是kp=10时的纯比例控制的阶跃响应,可以看到存在将近0.2的静态误差。
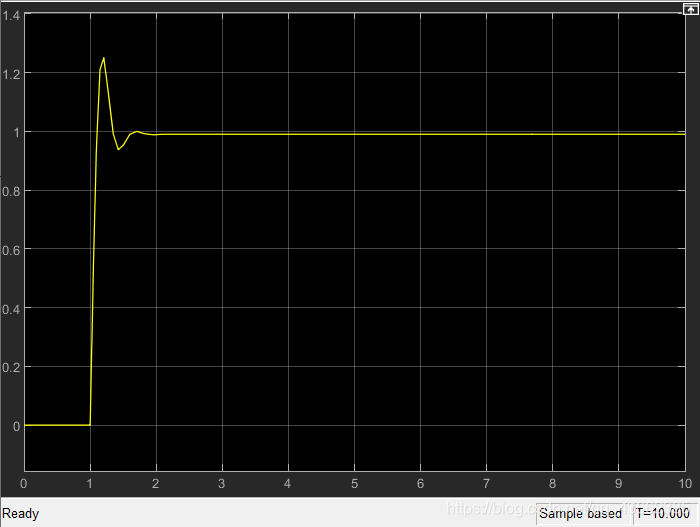
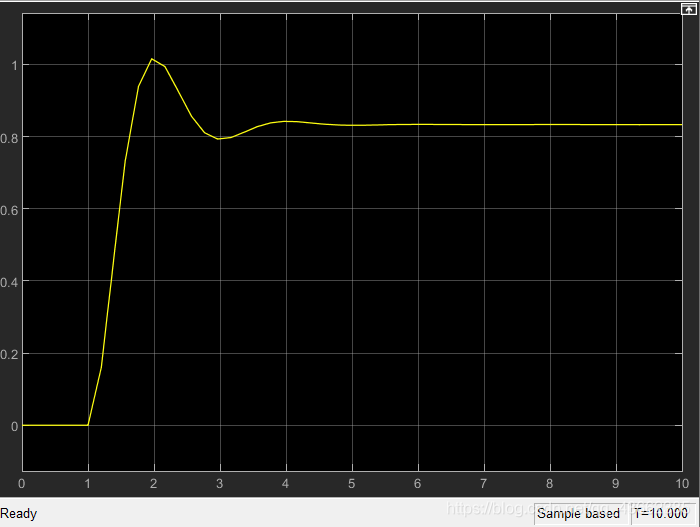
上图是kp=10,ki=200时的阶跃响应,可以看出静态误差几乎为0了,但是存在较大到的超调量,这就是积分控制带来的问题,会加大系统超调量,再对比一下响应时间,一图在4.5秒左右达到稳态响应输出,二图在1.8秒左右就达到了稳态响应输出。
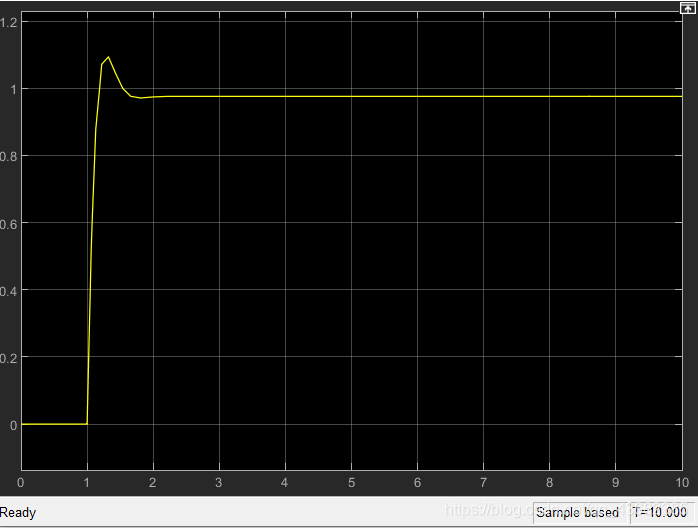
上图是kp=10,ki=80时的阶跃输入响应,可以看到系统的超调量相较于二图有所减少,从而验证了ki越大,超调越大这一性质,但是响应时间有所增加,也就是说,ki越小,从时域来看滞后就会增加,响应会变慢,输入和输出的相似度就会降低。有问题的话看看bode图就一目了然了:
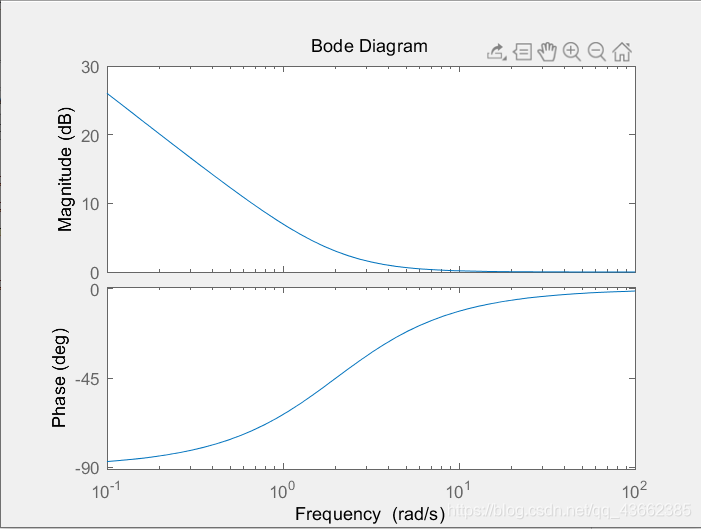
我们设ki=2,kp=1:
num=[1 2];
den=[1 0];
sys=tf(num,den);
kp=10;
bode(sys);
bode图为:
设ki=10,kp=1;
num=[1 10];
den=[1 0];
sys=tf(num,den);
kp=10;
bode(sys);
bode图为:
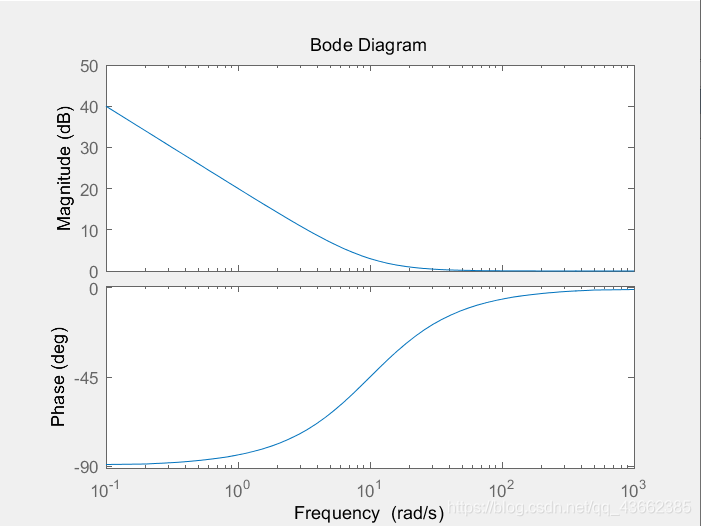
可以看出在一定范围内,ki越大,截止频率就越大,就有更多的频率的分量能够通过这个控制器,那么输出也与输入更接近,响应也更迅速。插个小曲子,这里的阶跃输入从频率角度怎么看它呢?
用傅里叶变换啊:
最后解出来F(w)=1/jw,可以看出在整个频率域,阶跃函数都有分量,PI控制器本来就可以看成是一个低通滤波器,如果截止频率越大,通过的频率分量越多,那么输出就更加接近于输入。
传送门:下一篇博客主题是基于三环PI控制的运动控制系统的设计,等有空了再接着写,且当做学习笔记。我先把这个三环PI控制的运动控制系统的simulink模型贴出来(含抗积分饱和的模型,假定电源最大能提供28V电压,参数并没有调到最好,下一篇文章会提到如何调节各环PI参数),做的不规范之处多多包涵哈!!!
链接:https://pan.baidu.com/s/1KDFs3LlHSeewr29b4ZZ-Nw
提取码:0q87
原创不易,点个小红心再走吧!!!
以上