AOE网
AOE网是指在有向网中,如果用顶点表示事件,用有向边表示活动,边上的权值表示活动持续的时间,则称这样的有向网为弧表示活动的网(Acticity On Edge,AOE-网)。对仅有一个开始点和一个完成点的工程,可用AOE-网来表示,它可用来估算工程的完成时间。
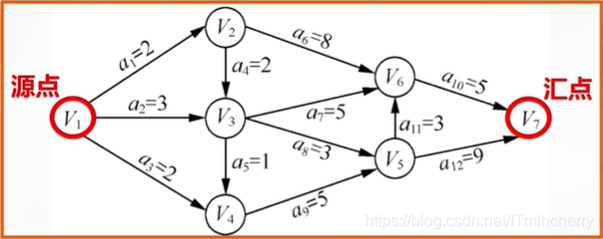
- 网中仅有一个入度为0的顶点称为源点,表示工程的开始;仅有一个出度为0的顶点称为汇点,表示工程的结束。
- 只有在进入某一顶点的各有向边所代表的活动均已完成,该顶点所代表的事件才能发生;只有在某顶点所代表的事件发生后,从该顶点发出的所有有向边所代表的活动才能开始。
- 整个工程完成的时间为:从有向图的源点到汇点的最长路径,即关键路径。
- 关键活动持续时间的总和(关键路径的长度)就是完成整个工程的最短工期。
关键路径思想
最早发生时间(对于顶点)
概念:ve(j):v是顶点,即事件,e是early,即最早,j是顶点vj;
ve(j)是指事件(顶点)的最早发生时间;
ve(j) = 从源点到顶点j的最长路径长度;
ve(源点)=0;
ve(j)=Max{ve(k)+dut(<k,j>)},dut<k,j>表示活动持续的时间;
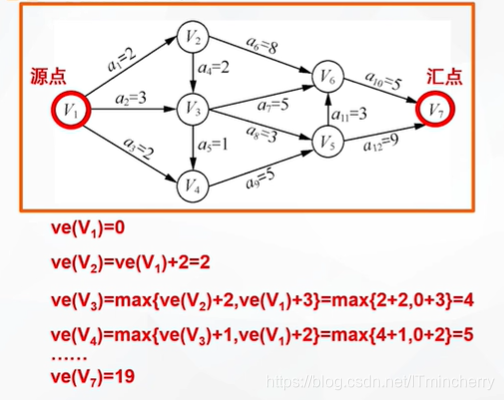
ve(j)的值可从源点开始按拓扑顺序向汇点递推。
最迟发生时间(对于顶点)
vl(k):v是顶点,即事件,l是late,即最迟,k是顶点vk
vl(k)是事件(顶点)的最迟发生时间;
vl(k) = 从顶点k到汇点的最短路径长度;
vl(汇点) = ve(汇点);
vl(k) = Min{vl(j) - dut<k,j>}
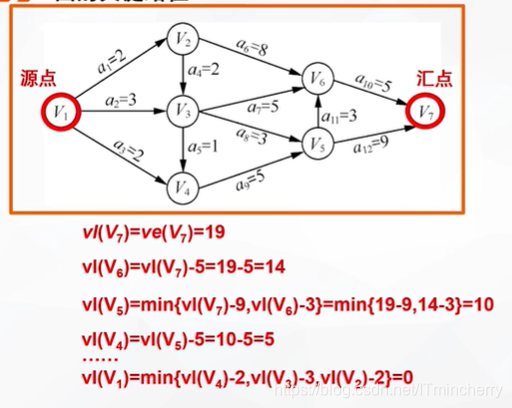
vl(j)的值可从汇点开始按逆拓扑顺序向源点递推。
最早开始时间和最晚开始时间(对于边)
- 活动的最早开始时间
ee(i) = ve(j)
即:假设第i条弧为<j,k>,则ee(i)为第i项活动(弧)的最早开始时间; - 活动的最晚开始时间
el(i) = vl(k)-dut(<j,k>)
即:el(i)为第i项活动(弧)的最迟开始时间
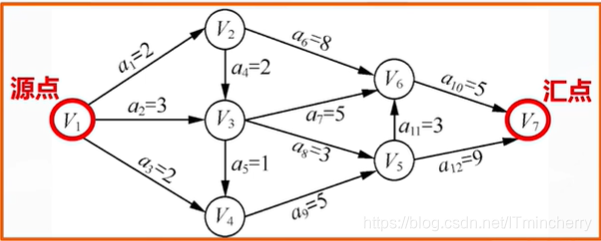
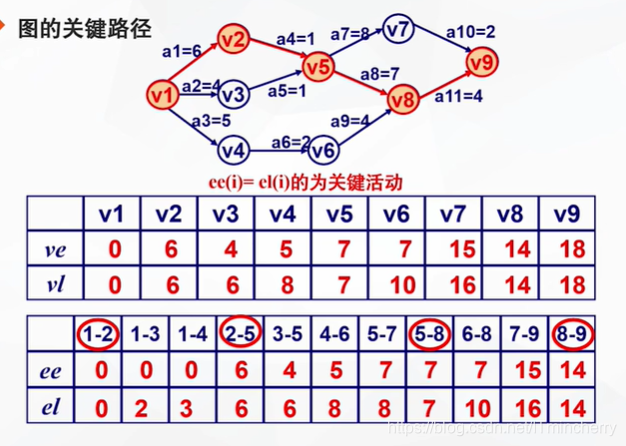
ee(a1)=ee(V1-V2)=ve(V1)=0
el(a1)=el(V1-V2)=vI(V2)-2=0
ee(a6)=ee(V2-V6)=ve(V2)=2
el(a6)=el(V2-V6)=vI(V6)-8=6
……
如果这个活动的最早开始时间和最晚开始时间是相同的,那就说明活动不允许延迟。如果二者有差额,说明是有余量的,不影响整个工期。
关键活动是ee(aj)=el(aj)的活动。
首先,求得每个事件的最早发生时间ve,再从汇点到源点求得最晚发生时间。求得每个活动的最早和最晚发生时间。然后找活动最早和最晚发生时间相同的,这就是整个工期里面不可以延期的关键活动。
关键路径算法实现
关键路径的求解步骤
- 按拓扑顺序求出每个事件的最早发生时间;
- 按逆拓扑序列求出每个事件的最迟发生时间;
- 计算每个活动的最早开始时间和最晚发生时间;
- 找出关键活动,即ee(ai)=el(ai)的活动。
改造拓扑排序算法
- 求出各顶点的入度,并将入度为0的顶点入队;
- 将各顶点的最早发生时间ve(i)初始化为0;
- 只要队列不空,重复以下步骤:
(1)将队头顶点j出队,同时压入栈T(逆拓扑)
(2)将队头j的每一个邻接点k的入度减1,如果顶点k的入度减为0,则将顶点k入队;
(3)根据顶点j的最早发生时间ve(j)和弧<j,k>的权值,更新顶点k的最早发生时间ve(k).
算法
int TopoSort_Ve(AdjList G, Stack*T){
Queue Q;
int indegree[MAXVEX], ye[MAXVEX];
int i,count=0,k;
ArcNode *p;
FindID(G, indegree);
InitQueue(&Q);
InitStack(&T);
for(i=0;i<G.vexnum;i++)
if(indegree[i]==0) EnterQueue(&Q,i); for(i=0:i<G. vexnum:i++) ve[i]=0;
while(!lsEmpty(Q))
{ DeleteQueue(&Q,&i);
Push(T,i);
count++;
p=G.vertex[i].head;
while(p!=NULL)
{ k=p->adjvex;
if(--indegree[k]==0) EnterQueue(&Q,k);
if(ve[j]+p->weight>ve[k]) ve[k]=ve[j]+p->weight;
p=p->next;
}
}
if(count<G. vexnum) return 0;
else return 1;
}
关键路径的算法步骤:
- 调用修改后的拓扑排序算法,求出每个事件的最早发生时间和逆拓扑序列栈T;
- 将各顶点的vl(i)初始化为汇点的最早发生时间;
- 只要栈不空,重复以下步骤:
(1)将栈顶顶点j出队;
(2)将栈顶j的每一个邻接点k,根据顶点k的vl(k)和弧<j,k>的权值,更新顶点j的最晚发生时间vl(j)。
(3)扫描每一条弧计算其ee(i)和el(i),当ee(i)=el(i)输出该条弧。
int CriticalPath(AdjList G){
ArcNode *p;
int i,j,k,a, eei, eli, flag=0;
int vl[MAXVEX];//存每一个事件的最晚发生时间
Stack S;
if(!TopoSort_Ve(G,&T)) return(0); for(i=0;i<G.vexnum:i++)
vl[i]=ve[G.vexnum-1];
while(!IsEmpty(&T)){
pop(T,&j); //出栈顶元素
p=G.vertex[j].head;
while(p){//找邻接点
k=p->adjvex;
a=p->weight;
if(vl[k])-a<vl[i}) vl[j]=vl[k]-a;
p=p->next;
}
}
for(i=0;i<vexnum;i++){
p=G.vextex[i].head;
while(p){
k=p->adjvex;
a=p->weight;
eei=ve[j];
eli=vl[k]-a;
if(eei==eli) flag=1;
p=p->next;
}
}
}