目录
13、cv2.inRange(hsv, lower_hsv, upper_hsv)
整理不易,点个赞加个关注吧!
cv2常用类:
1、图片加载、显示和保存
-
cv2.imread(filename, flags) :读取加载图片
-
cv2.imshow(winname, mat) : 显示图片
-
cv2.waitKey() : 等待图片的关闭
-
cv2.imwrite(filename, img) : 保存图片
import cv2
# 读取图片,第二个参数为False时,显示为灰度图像,True为原图
img = cv2.imread(filename="cat.jpg", flags=False)
# 显示图片,第一个参数为图片的标题
cv2.imshow(winname="image title", mat=img)
# 等待图片的关闭,不写这句图片会一闪而过
cv2.waitKey()
# 保存图片
cv2.imwrite("Grey_img.jpg", img)cv2.waitKey() : 等待图片的关闭
可设置参数,为多少毫秒后自动关闭
import cv2 for file in filelist: image = cv2.imread(file, flags=False) cv2.imshow(winname="11",mat=image) # 每隔1000ms显示一张图片 cv2.waitKey(1000)
2、图像显示窗口创建与销毁
- cv2.namedWindow(winname, 属性):创建一个窗口
- cv2.destroyWindow(winname):销毁某个窗口
-
cv2.destroyAllWindows():销毁所有窗口
winname作为窗口的唯一标识,如果想使用指定窗口显示目标图像,需要让cv2.imshow(winname)中的winname与窗口的winname需要保持一致。
窗口创建时可以添加的属性:
- cv2.WINDOW_NORMAL:窗口大小可以改变(同cv2.WINDOW_GUI_NORMAL)
- cv2.WINDOW_AUTOSIZE:窗口大小不能改变
- cv2.WINDOW_FREERATIO:窗口大小自适应比例
- cv2.WINDOW_KEEPRATIO:窗口大小保持比例
- cv2.WINDOW_GUI_EXPANDED:显示色彩变成暗色
cv2.WINDOW_FULLSCREEN:全屏显示
cv2.WINDOW_OPENGL:支持OpenGL的窗口
img = cv2.imread("cat.jpg")
# 第二个参数为窗口属性
cv2.namedWindow(winname="title", cv2.WINDOW_NORMAL)
# 如果图片显示想使用上面的窗口,必须保证winname一致
cv2.imshow(winname="title", img)
cv2.waitKey()
# 销毁
cv2.destroyWindow("title")
# 销毁所有窗口:cv2.destroyAllWindows()3、图片的常用属性的获取
-
img.shape:打印图片的高、宽和通道数(当图片为灰度图像时,颜色通道数为1,不显示)
-
img.size:打印图片的像素数目
-
img.dtype:打印图片的格式
注意:这几个是图片的属性,并不是调用的函数,所以后面没有‘ () ’。
import cv2
img = cv2.imread("cat.jpg")
imgGrey = cv2.imread("cat.jpg", False)
print(img.shape)
print(imgGrey.shape)
#输出:
#(280, 300, 3)
#(280, 300)
print(img.size)
print(img.dtype)
#输出:
# 252000
# uint84、生成指定大小的矩形区域(ROI)
- 一个图片img,它的某个像素点可以用 img[x, y, c] 表示(x,y为坐标,c为通道数)
- 同理,这个图片的某个矩形区域可以表示为:img[x1:x2, y1:y2, c](相当于截下一块矩形,左上角坐标为(x1, y1),右下角坐标为(x2, y2))
- 其中 c 一般取值为0,1,2(BGR)代表第几个颜色通道,可以省略不写 img[x, y] 代表所有通道。
实例一:生成一个大小为(300,400)颜色通道为3的红色图片
import cv2
import numpy as np
imgzero = np.zeros(shape=(300, 400, 3), dtype=np.uint8)
imgzero[:, :] = (0, 0, 255) # (B, G, R)
cv2.imshow("imgzero",imgzero)
cv2.waitKey()实例二:从一张图片上截取一个矩形区域
import cv2
import numpy as np
img = cv2.imread("cat.jpg")
# 输出(50,100)上的像素值
num = img[50, 100]
print(num)
# 截取部分区域并显示
region = img[50:100, 50:100]
cv2.imshow("img", region)
cv2.waitKey()5、图片颜色通道的分离与合并
-
cv2.split(m):将图片m分离为三个颜色通道
-
cv2.merge(mv):将三个颜色通道合并为一张图片
import cv2
img = cv2.imread("cat.jpg")
b, g, r = cv2.split(img)
merge = cv2.merge([b, g, r])6、两张图片相加,改变对比度和亮度
-
cv2.add(src1, src2):普通相加
-
cv2.addWeighted(src1, alpha, src2, w2,beta):带权相加
src1:第一张图片
alpha:第一张图片权重
src2:第二张图片
beta:第二张图片权重
gamma:图1与图2作和后添加的数值。
dst:输出图片
import cv2
img1 = cv2.imread("cat.jpg")
img2 = cv2.imread("dog.jpg")
add1 = cv2.add(img1,img2)
add2 = cv2.addWeighted(img1, 0.5, img2, 0.5, 3)
cv2.imshow("add1", add1)
cv2.imshow("add2", add2)
cv2.waitKey()cv2.addWeighted(src1, alpha, src2, w2,beta)可以改变图像的对比度和亮度。
通过改变alpha的值改变对比度,beta控制亮度。
# 改变对比度和亮度 def contrast_brightness_demo(img, c, b): h, w, ch = img.shape blank = np.zeros([h, w, ch], img.dtype) dst = cv2.addWeighted(img, c, blank, 1-c , b) cv2.imshow("contrast_brightness_demo", dst)
7、像素运算(1)加减乘除
对两张相同大小的图像进行加减乘除,cv2.imread()读取的图像,其实相当于获取了一个多维数组,每一个像素值就是数组坐标下的值。那么像素的基本运算就相当于是数组之间的运算。
def add_demo(m1, m2):
dst = cv2.add(m1, m2)
cv2.imshow("add", dst)
def subtract_demo(m1, m2):
dst = cv2.subtract(m1, m2)
cv2.imshow("subtract", dst)
def multiply_demo(m1, m2):
dst = cv2.multiply(m1, m2)
cv2.imshow("multiply", dst)
def divide_demo(m1, m2):
dst = cv2.divide(m1, m2)
cv2.imshow("divide", dst)8、像素运算(2)均值&方差
def demo(img):
# 均值
M1 = cv2.mean(img)
print(M1)
# 均值和方差
M1, dev1 = cv2.meanStdDev(img)
print(M1)
print(dev1)9、像素运算(3)逻辑运算——与、或、非、异或
其中非运算就是对图像进行颜色反转
def logic_demo(m1, m2):
dst = cv2.bitwise_and(m1, m2)
cv2.imshow("bitwise_and", dst)
dst = cv2.bitwise_or(m1, m2)
cv2.imshow("bitwise_or", dst)
dst = cv2.bitwise_not(m1, m2)
cv2.imshow("bitwise_not", dst)
dst = cv2.bitwise_xor(m1, m2)
cv2.imshow("bitwise_xor", dst)10、计算执行时间
- cv2.getTickCount() :用于返回从操作系统启动到当前所经的计时周期数;
- cv2.getTickFrequency():用于返回CPU的频率,也就是一秒内重复的次数。
时间(s) = 总次数 / 一秒内重复的次数
时间(ms) = 1000 *总次数 / 一秒内重复的次数
t1 = cv2.getTickCount()
function() # 待测试的函数
t2 = cv2.getTickCount()
time = (t2 - t1) / cv2.getTickFrequency()
print("time : %s ms" % (time * 1000))11、泛洪填充(需要4、ROI的知识)
Windows自带的画图中有一个工具(油桶形状的),看下右图中,白色的背景,你用黑色画一个菱形,然后用这个油桶工具点一下菱形内部,就可以把菱形内部染成红色。
你在菱形内部用鼠标点击的那一下,点在了一个像素点上,我们知道这个像素点是白色的,那么油桶在染色的时候,就在这个原像素点的周围寻找相同的像素(白色像素),然后把和原像素点相同的像素都染成红色。(就像是从原像素点360度无死角发散寻找)
那么它什么时候结束染色呢?当它遇到和原像素点的像素不同的点时,就会中止这个方向的寻找。(也就是遇到了我们画的那个黑色边框)同理在OpenCV里,提供了这样的函数
def floodFill( image, 原图像
mask, 掩码,单通道8位图像,比image的高度多2个像素,宽度多2个像素。
seedPoint, 起始点(原像素点,相当于鼠标点击的那个像素点)
newVal, 在重绘区域像素的新值(RBG值,相当于上图指定的红色)
loDiff=None, 像素值的下限差值(最多比原像素点低多少)
upDiff=None, 像素值的上限差值(最多比原像素点高多少)
flags=None)
- FLOODFILL_FIXED_RANGE – 改变图像,泛洪填充
- FLOODFILL_MASK_ONLY – 不改变图像,只填充遮罩层本身,忽略新的颜色值参数
def fill_color_demo(): copyImg = img.copy() h, w = img.shape[:2] mask = np.zeros([h+2, w+2], np.uint8) cv2.floodFill(copyImg, mask, (100, 200), (0, 255, 0), (100, 100, 100), (50, 50, 50), cv2.FLOODFILL_FIXED_RANGE) cv2.imshow("fill_color_demo", copyImg) def fill_binary_demo(): img2 = np.zeros([400, 400, 3], np.uint8) img2[100:300, 100:300, :] = 255 mask = np.ones([402, 402], np.uint8) mask[101:301, 101:301] = 0 cv2.floodFill(img2, mask, (200, 200), (0, 0, 255), cv2.FLOODFILL_MASK_ONLY) cv2.imshow("fill_binary_demo", img2)
12、彩色空间转换
cv2.cvtColor
-
原型:cvtColor(src,code,dst=None,dstCn=None)
-
作用:将一幅图像从一个色彩空间转换到另一个色彩空间
-
参数:code,转换的色彩空间
# 色彩空间转换
def color_space_demo(img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
cv2.imshow("hsv", hsv)
yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV)
cv2.imshow("yuv", yuv)
ycrcb = cv2.cvtColor(img, cv2.COLOR_BGR2YCrCb)
cv2.imshow("ycrcb", ycrcb)
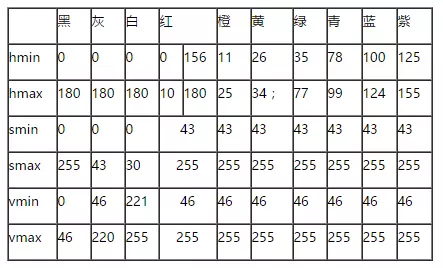
13、cv2.inRange(hsv, lower_hsv, upper_hsv)
利用cv2.inRange函数设阈值,这里注意用的颜色空间是hsv。
HSV:HSV颜色空间是孟塞尔彩色空间的简化形式,是一种基于感知的颜色模型。它将彩色信号分为3种属性:色调(Hue,H),饱和度(Saturation,S),亮度(Value,V)。色调表示从一个物体反射过来的或透过物体的光波长,也就是说,色调是由颜色的名称来辨别的,如红、黄、蓝;亮度是颜色的明暗程度;饱和度是颜色的深浅,如深红、浅红。
HSV颜色空间反映了人观察色彩的方式,具有两个显著的特点:
- 亮度分量与图像的彩色信息无关
- “色调”和“饱和度”分量与人感受颜色的方式是紧密相连的
可以根据右表来确定lower_hsv, upper_hsv的取值。
# 颜色追踪
def extrace_object_demo():
capture = cv2.VideoCapture("testvideo.mp4")
while(True):
ret, frame = capture.read()
if ret == False:
break
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
lower_hsv = np.array([0, 0, 0])
upper_hsv = np.array([180, 255, 46])
mask = cv2.inRange(hsv, lower_hsv, upper_hsv)
dst = cv2.bitwise_and(frame, frame, mask=mask)
cv2.imshow("video", frame)
cv2.imshow("video", dst)
c = cv2.waitKey(40)
if c == 27:
break14、均值模糊、中值模糊,高斯模糊,双边模糊
附一篇博客:真正搞懂均值模糊、中值模糊、高斯模糊、双边模糊
模糊操作基本原理:
- 基于离散卷积
- 定义好每个卷积核
- 不同卷积核得到不同的卷积效果
- 模糊是卷积的一种表象
cv2.blur
-
原型:blur(src,ksize,dst=None,anchor=None,borderType=None)
-
作用:对图像进行算术平均值模糊
-
参数:ksize,卷积核的大小。dst,若填入dst,则将图像写入到dst矩阵。
cv2.medianBlur
-
原型:mediaBlur(src,ksize,dst=None)
-
作用:对图像进行中值模糊
def blur_demo(img):
# 均值模糊
dst = cv2.blur(img, (5, 5)) # 5*5的卷积核
cv2.imshow("dst", dst)
# 中值模糊,可以去噪音
dst = cv2.medianBlur(img, 5)
# 自定义
kernel = np.ones([5, 5], np.float32) / 25
dst = cv2.filter2D(img, -1, kernel)
# 锐化(特定的卷积核)
kernel = np.array([[0, -1, 0], [-1, 5, -1], [0, -1, 0]], np.float32)
dst = cv2.filter2D(img, -1, kernel)cv2.GaussianBlur
-
原型:GaussianBlur(src, ksize, sigmaX, dst=None, sigmaY=None, borderType=None)
-
作用:对图像进行高斯模糊
-
参数:sigmaX,X方向上的方差,一般设为0让系统自动计算。
def Gauss_blur():
img = np.array([[14, 15, 16], [24, 25, 26], [34, 35, 36]], dtype=np.float32)
blur = cv2.GaussianBlur(img, (3, 3), 1.5)
print(blur)
Gauss_blur()
# output:
[[20.771631 21.156027 21.540426]
[24.615604 25. 25.3844 ]
[28.45958 28.843975 29.228374]]cv2.bilateralFilter
- 原型:bilateralFilter(src, d, sigmaColor, sigmaSpace, dst=None, borderType=None)
- 作用:对图像进行双边模糊
- 参数:int d: 表示在过滤过程中每个像素邻域的直径范围。如果这个值是非正数,则函数会从第五个参数sigmaSpace计算该值。
double sigmaColor: 颜色空间过滤器的sigma值,这个参数的值月大,表明该像素邻域内有越宽广的颜色会被混合到一起,产生较大的半相等颜色区域。 (这个参数可以理解为值域核的)
double sigmaSpace: 坐标空间中滤波器的sigma值,如果该值较大,则意味着越远的像素将相互影响,从而使更大的区域中足够相似的颜色获取相同的颜色。当d>0时,d指定了邻域大小且与sigmaSpace无关,否则d正比于sigmaSpace. (这个参数可以理解为空间域核的)
def bilateralFilter_demo(img):
dst = cv2.bilateralFilter(img, 0, 100, 150)
cv2.imshow("bilateralFilter", dst)
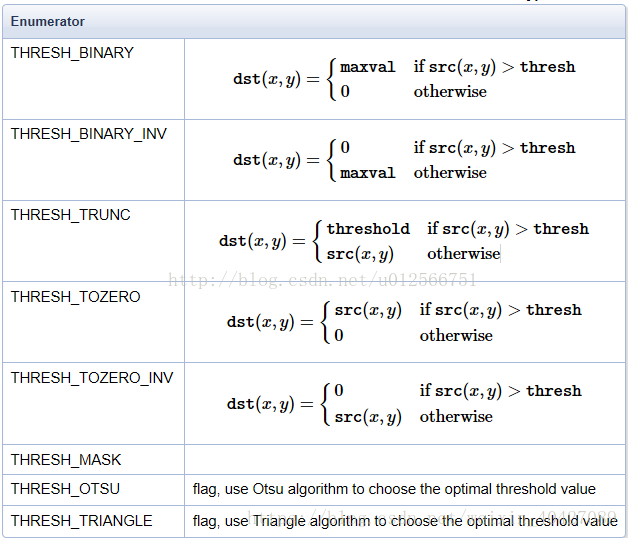
bi_demo(img)15、二值化(cv2.threshold)
二值化就是把图像的像素转变为0或者255,只有这两个像素值。
推荐博客:
-
原型:threshold(src,thresh,maxval,type,dst=None)
-
作用:将图像的每个像素点进行二值化
-
参数:thresh,阈值(最小值)。maxval,二值化的最大取值。
type,二值化类型,一般设为0,也可以取以下的值: -
返回值:计算过后的阈值值和二值化后的图像(如果dst是None)

# 全局二值化
def threshold_demo():
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)
cv2.ADAPTIVE
print("threshold value : %s\n" % ret)
cv2.imshow("binary_global", binary)
threshold_demo()函数:adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C, dst=None)
参数:
- maxValue:阈值的最大值;
- adaptiveMethod:指定自适应阈值算法。可选择ADAPTIVE_THRESH_MEAN_C 或 ADAPTIVE_THRESH_GAUSSIAN_C两种。(自适应阈值化计算大概过程是为每一个象素点单独计算的阈值,即每个像素点的阈值都是不同的,就是将该像素点周围blockSize*blockSize区域内的像素加权平均,然后减去一个常数C,从而得到该点的阈值。)。
ADAPTIVE_THRESH_MEAN_C:为局部邻域块的平均值。该算法是先求出块中的均值,再减去常数C。
ADAPTIVE_THRESH_GAUSSIAN_C:为局部邻域块的高斯加权和。该算法是在区域中(x,y)周围的像素根 据高斯函数按照他们离中心点的距离进行加权计算, 再减去常数C。
- thresholdType:指定阈值类型。可选择THRESH_BINARY或者THRESH_BINARY_INV两种。(即二进制阈值或反二进制阈值)。
- blockSize:表示邻域块大小,用来计算区域阈值,奇数,一般选择为3、5、7......等。
- C:表示与算法有关的参数,它是一个从均值或加权均值提取的常数,可以是负数。(具体见下面的解释)。
# 局部二值化
def local_threshold_demo():
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
binary = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 25, 10)
#print("threshold value : %s\n" % ret)
cv2.imshow("binary_local", binary)16、图像直方图
图像直方图详解——定义、计算、均衡、比较、反射投影
17、模板匹配
模板匹配,就是在整个图像区域发现与给定子图像匹配的小块区域,需要模板图像T和待检测图像-源图像S;
工作方法:在待检测的图像上,从左到右,从上倒下计算模板图像与重叠子图像匹配度,匹配度越大,两者相同的可能性越大。
函数:matchTemplate(image, templ, method, result=None, mask=None)
参数:
- image:源图像S;
- templ:模板图像T,一般是源图像S中的一小块;
- method:模板匹配算法(cv.TM_SQDIFF_NORMED最小时最相似,其他最大时最相似)

import cv2
import numpy as np
from matplotlib import pyplot as plt
def template_demo():
tpl = cv2.imread("sample.jpg")
target = cv2.imread("target.jpg")
cv2.imshow("tpl", tpl)
cv2.imshow("target", target)
methods = [cv2.TM_SQDIFF_NORMED, cv2.TM_CCORR_NORMED, cv2.TM_CCOEFF_NORMED] # 三种模板匹配方法
th, tw = tpl.shape[:2]
for md in methods:
print(md)
result = cv2.matchTemplate(target, tpl, md) # 得到匹配结果
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
if md == cv2.TM_SQDIFF_NORMED: # cv.TM_SQDIFF_NORMED最小时最相似,其他最大时最相似
tl = min_loc
else:
tl = max_loc
br = (tl[0] + tw, tl[1] + th)
cv2.rectangle(target, tl, br, (0, 0, 255), 2) # tl为左上角坐标,br为右下角坐标,从而画出矩形
cv2.imshow("match-"+np.str(md), target)
template_demo()
cv2.waitKey(0)
cv2.destroyAllWindows()
18、图像金字塔(上采样和下采样)
图像缩小(先高斯模糊,再降采样,需要一次次重复,不能一次到底)
图像扩大(先扩大,再卷积或者使用拉普拉斯金字塔)
推荐博客:OpenCV---图像金字塔原理
import cv2
import numpy as np
# 图像金字塔和拉普拉斯金字塔(L1 = g1 - expand(g2)):reduce:高斯模糊+降采样,expand:扩大+卷积
# PyrDown降采样,PyrUp还原
def pyramid_demo(image):
level = 4
temp = image.copy()
pyramid_images = []
for i in range(level):
dst = cv2.pyrDown(temp)
pyramid_images.append(dst)
cv2.imshow("pyramid_down_"+str(i+1), dst)
temp = dst.copy()
return pyramid_images
def laplace_demo(image): # 注意:图片必须是满足2^n这种分辨率
pyramid_images = pyramid_demo(image)
level = len(pyramid_images)
for i in range(level-1, -1, -1):
if i-1 < 0:
expand = cv2.pyrUp(pyramid_images[i], dstsize=image.shape[:2])
lpls = cv2.subtract(image, expand)
cv2.imshow("laplace_demo"+str(i), lpls)
else:
expand = cv2.pyrUp(pyramid_images[i], dstsize=pyramid_images[i-1].shape[:2])
lpls = cv2.subtract(pyramid_images[i-1], expand)
cv2.imshow("laplace_demo"+str(i), lpls)
src = cv2.imread("img1.jpg") # 图像必须是2^n * 2^m的
cv2.imshow("demo", src)
#pyramid_demo(src)
laplace_demo(src)
cv2.waitKey(0)
cv2.destroyAllWindows()19、图像梯度
图像梯度其实就是对图像进行求导,图像也是一个函数(离散的),这里其实就是用特定的滤波器来进行卷积操作。
cv2.Sobel
Sobel算子是高斯平滑和微分操作的结合体,所以他的抗噪声能力很好。他计算的是一阶导数,可以自己定义x方向或者y方向。
卷积因子:

原型: Sobel(src,ddepth,dx,dy,dst=None,ksize=None,scale=None,delta=None,borderType=None)
作用:对图像进行Sobel算子计算。检测出其边缘。
参数:dx,x方向上的导数阶数;dy,y方向上的导数阶数。
import cv2 as cv
import numpy as np
def sobel_demo(image):
grad_x = cv2.Sobel(image, cv2.CV_32F, 1, 0) # 采用Scharr边缘更突出
grad_y = cv2.Sobel(image, cv2.CV_32F, 0, 1)
gradx = cv2.convertScaleAbs(grad_x) # 由于算完的图像有正有负,所以对其取绝对值
grady = cv2.convertScaleAbs(grad_y)
# 计算两个图像的权值和,dst = src1*alpha + src2*beta + gamma
gradxy = cv2.addWeighted(gradx, 0.5, grady, 0.5, 0)
cv2.imshow("gradx", gradx)
cv2.imshow("grady", grady)
cv2.imshow("gradient", gradxy)
src = cv.imread("../images/lena.jpg")
cv.imshow("lena",src)
sobel_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
cv2.scharr
- 原型:Scharr(src, ddepth, dx, dy, dst=None, scale=None, delta=None, borderType=None, /)
是Sobel的优化版,在使用3*3卷积核时这个优于Sobel,其它尺寸的卷积核用Sobel就行。

import cv2 as cv
import numpy as np
def scharr_demo(image):
grad_x = cv2.Scharr(image, cv2.CV_32F, 1, 0) # 采用Scharr边缘更突出
grad_y = cv2.Scharr(image, cv2.CV_32F, 0, 1)
gradx = cv2.convertScaleAbs(grad_x) # 由于算完的图像有正有负,所以对其取绝对值
grady = cv2.convertScaleAbs(grad_y)
# 计算两个图像的权值和,dst = src1*alpha + src2*beta + gamma
gradxy = cv2.addWeighted(gradx, 0.5, grady, 0.5, 0)
cv2.imshow("gradx", gradx)
cv2.imshow("grady", grady)
cv2.imshow("gradient", gradxy)
src = cv.imread("../images/lena.jpg")
cv.imshow("lena",src)
scharr_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
cv2.Laplacian
Laplacian算子是个二阶微分。下面两个卷积核,靠上的是4邻域的,靠下的是8邻域的。函数默认为8邻域。

原型:Laplacian(src,ddepth,dst=None,ksize=None,scale=None,delta=None,borderType=None)
作用:检测图像边缘。
参数:ddepth,图像位深度,对于灰度图来说,其值为:cv2.CV_8U。ksize,希望使用的卷积核的大小。scale,是缩放导数的比例常数。
import cv2 as cv
import numpy as np
def laplace_demo(image): # 二阶导数,边缘更细
dst = cv2.Laplacian(image,cv2.CV_32F)
lpls = cv2.convertScaleAbs(dst)
cv2.imshow("laplace_demo", lpls)
src = cv.imread("../images/lena.jpg")
cv.imshow("lena",src)
laplace_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
VideoCapture 类
cv2.VideoCapture
-
原型:VideoCapture(*args,**kwargs)
-
作用:初始化VideoCapture类并利用构造函数读入该视频的当前帧。
-
参数:一般仅填入一个,即文件名。如果填入整数,则打开对应的捕获设备ID。若为0,则打开默认摄像头。
VideoCapture.get
-
原型:VideoCapture.get(self,propld)
-
作用:返回该视频的propld所指定的属性
-
参数:propld,为需要读取的视频属性参数位,一般以cv2.CAP_PROP_ 开头
参数名称
作用
CV_CAP_PROP_POS_MSEC
当前视频文件的时间位置(返回毫秒)或视频捕获时间戳
CV_CAP_PROP_POS_FRAMES
从0开始的解码/捕获时间帧
CV_CAP_PROP_POS_AVI_RATIO
返回视频文件的相关位置:0,视频开始。1,视频结束
CV_CAP_PROP_FRAME_WIDTH
视频流中的帧宽
CV_CAP_PROP_FRAME_HEIGHT
视频流中的帧高
CV_CAP_PROP_FPS
帧率
CV_CAP_PROP_FOURCC
返回解码方式中的四字符
CV_CAP_PROP_FRAME_COUNT
视频文件的总帧数
CV_CAP_PROP_FORMAT
由retrieve()函数返回的矩阵对象的格式
CV_CAP_PROP_MODE
用于预测当前捕获模式的后端专用值
CV_CAP_PROP_BRIGHTNESS
图像的亮度(仅用于摄像头)
CV_CAP_PROP_CONTRAST
图像的对比度(仅用于摄像头)
CV_CAP_PROP_SATURATION
图像的饱和度(仅用于摄像头)
CV_CAP_PROP_HUE
图像的色调(仅用于摄像头)
CV_CAP_PROP_GAIN
图像增益(仅用于摄像头)
CV_CAP_PROP_EXPOSURE
曝光度(仅用于摄像头)
CV_CAP_PROP_CONVERT_RGB
用于预测图像是否应该被转换为RGB的布尔位
CV_CAP_PROP_WHITE_BALANCE
白平衡(当前不支持)
CV_CAP_PROP_RECTIFICATION
立体相机的纠正位
VideoCapture.isOpened
-
参数:无
-
作用:判断设备/文件是否读取成功,若成功,返回True
VideoCapture.release
-
参数:无
-
作用:关闭文件/摄像头
VideoCapture.read
-
参数:无
-
返回值:bool,numpy.array
-
作用:读取该文件/摄像头的下一帧,成功与否由bool返回值决定,返回的帧矩阵为第二个参数
VideoWriter类
cv2.VideoWriter
-
原型:cv2.VideoWriter(*args,**kwargs)
-
参数:第一个,写入的视频文件名。第二个,由cv2.VideoWriter_fourcc返回的视频制式特定代码,通常有XVID,MPEG等。第三个,该视频的fps。第四个,一个tuple,为该视频的宽、高。
参数名称
解释
CV_FOURCC(‘P’, ‘I’, ‘M’, ‘1’)
MPEG-1 codec
CV_FOURCC(‘M’, ‘J’, ‘P’, ‘G’)
motion-jpeg codec
CV_FOURCC(‘M’, ‘P’, ‘4’, ‘2’)
MPEG-4.2 codec
CV_FOURCC(‘D’, ‘I’, ‘V’, ‘3’)
MPEG-4.3 codec
CV_FOURCC(‘D’, ‘I’, ‘V’, ‘X’)
MPEG-4 codec
CV_FOURCC(‘U’, ‘2’, ‘6’, ‘3’)
H263 codec
CV_FOURCC(‘I’, ‘2’, ‘6’, ‘3’)
H263I codec
CV_FOURCC(‘F’, ‘L’, ‘V’, ‘1’)
FLV1 codec
CV_FOURCC(‘X’, ‘V’, ‘I’, ‘D’)
MPEG-4 decode
VideoWriter.write
-
原型:VideoCapture.write(image)
-
作用:将当前帧内容写入视频文件
-
参数:image,写入的当前帧
参考博客: