第3.1章 卷积神经网络CNN-2.1:动手实现简单的CNN
一、导入数据集并初始化数据集
使用cifar-10数据集,下载完成后,解压缩。cifar是32x32的彩色图像。
1.加载数据
data是一个字典,通过print(data.keys())查看字典的关键字。
data有四个关键字:'batch_label', 'labels', 'data', 'filenames',通过print(data['data'])查看某一关键字中的内容。
import pickle
def load(filename):
with open(filename, 'rb') as fo:
data = pickle.load(fo, encoding='latin1')
return data
path = 'D:\WorkSpace\PyCharmSpace\cifar-10-batches-py\data_batch_1'
data = load(path)
2.数据转图片
如果img = np.reshape(picData[i], (3, 32, 32)); img = img.transpose(1, 2, 0)用img = np.reshape(picData[i], (32, 32,3))代替,生成的一张图片将会是由3×3的9张图片组成的灰度图片
import numpy as np
from matplotlib.image import imsave
picData = data['data']
picLabel = data['labels']
fileName = data['filenames']
for i in range(len(picData)):
picName = 'D:\WorkSpace\PyCharmSpace\cifar-10-batches-py\imgs\\' + str(picLabel[i]) + '_' + str(fileName[i]) + '.jpg'
img = np.reshape(picData[i], (3, 32, 32))
img = img.transpose(1, 2, 0)
imsave(picName, img)
3.图片转rgb3通道三维矩阵
I1 = Image.open('D:\WorkSpace\PyCharmSpace\cifar-10-batches-py\img_1\\0_29.jpg')
I1_array = np.array(I1)
print(I1_array.shape)
输出(32, 32, 3)
4.用四维矩阵表示多张图片
I1 = Image.open('D:\WorkSpace\PyCharmSpace\cifar-10-batches-py\img_1\\0_29.jpg')
I2 = Image.open('D:\WorkSpace\PyCharmSpace\cifar-10-batches-py\img_1\\0_30.jpg')
I1_array = np.array(I1)
I2_array = np.array(I2)
#先拼接成一个行向量
d = np.append(I1_array,I2_array)
#获取原矩阵的维数
dim = I1_array.shape
#再通过原矩阵的维数重新组合
data = d.reshape(2,dim[0],dim[1],dim[2])
print(data.shape)
输出(2, 32, 32, 3)
二、基本函数
1.padding函数
def zero_pad(X, pad):
"""
Pad with zeros all images of the dataset X.
The padding is applied to the height and width of an image.
Argument:
X -- python numpy array of shape (m, n_H, n_W, n_C) representing a batch of m images
pad -- integer, amount of padding around each image on vertical and horizontal dimensions
Returns:
X_pad -- padded image of shape (m, n_H + 2*pad, n_W + 2*pad, n_C)
"""
#'constant'后面还有一个参数'constant_value',默认为0
X_pad = np.pad(X, ((0, 0), (pad, pad), (pad, pad), (0, 0)), 'constant')
return X_pad
2.一个单位的卷积运算
def conv_single_step(a_slice_prev, W, b):
"""
Apply one filter defined by parameters W on a single slice (a_slice_prev) of the output activation
of the previous layer.
Arguments:
a_slice_prev -- slice of input data of shape (f, f, n_C_prev)
W -- Weight parameters contained in a window - matrix of shape (f, f, n_C_prev)
b -- Bias parameters contained in a window - matrix of shape (1, 1, 1)
Returns:
Z -- a scalar value, the result of convolving the sliding window (W, b) on a slice x of the input data
"""
Z = np.sum(a_slice_prev * W)
Z = float(Z + b)
return Z
三、卷积层、池化层
这两层的代码的基本一样,主要区别:
- 卷积层需要进行卷积运算,池化层直接取区域最大值;
- 卷积层output的大小和填充大小有关,池化层不进行填充;
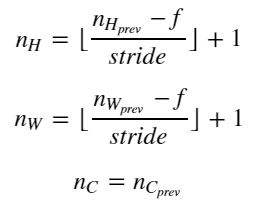
- 卷积层output第三维度的大小和过滤器的个数有关,池化层第三维度的大小与input大小一样
左边是卷积层计算output大小,右边是池化层计算output大小

1.一层卷积层
def conv_forward(A_prev, W, b, hparameters):
"""
Implements the forward propagation for a convolution function
Arguments:
A_prev -- output activations of the previous layer,
numpy array of shape (m, n_H_prev, n_W_prev, n_C_prev)
W -- Weights, numpy array of shape (f, f, n_C_prev, n_C)
b -- Biases, numpy array of shape (1, 1, 1, n_C)
hparameters -- python dictionary containing "stride" and "pad"
Returns:
Z -- conv output, numpy array of shape (m, n_H, n_W, n_C)
cache -- cache of values needed for the conv_backward() function
"""
(m, n_H_prev, n_W_prev, n_C_prev) = A_prev.shape
(f, f, n_C_prev, n_C) = W.shape
stride = hparameters['stride']
pad = hparameters['pad']
n_H = int((n_H_prev + 2 * pad - f) / stride + 1)
n_W = int((n_W_prev + 2 * pad - f) / stride + 1)
Z = np.zeros((m, n_H, n_W, n_C))
A_prev_pad = zero_pad(A_prev, pad)
for i in range(m): # loop over the batch of training examples
a_prev_pad = A_prev_pad[i, :, :, :] # Select ith training example's padded activation
for h in range(n_H): # loop over vertical axis of the output volume
vert_start = h * stride
vert_end = vert_start + f
for w in range(n_W): # loop over horizontal axis of the output volume
horiz_start = w * stride
horiz_end = horiz_start + f
for c in range(n_C): # loop over channels (= #filters) of the output volume
a_slice_prev = a_prev_pad[vert_start:vert_end, horiz_start:horiz_end, :]
weights = W[:, :, :, c]
biases = b[:, :, :, c]
Z[i, h, w, c] = conv_single_step(a_slice_prev, weights, biases)
assert (Z.shape == (m, n_H, n_W, n_C))
cache = (A_prev, W, b, hparameters)
return Z, cache
2.一层池化层
def pool_forward(A_prev, hparameters, mode="max"):
"""
Implements the forward pass of the pooling layer
Arguments:
A_prev -- Input data, numpy array of shape (m, n_H_prev, n_W_prev, n_C_prev)
hparameters -- python dictionary containing "f" and "stride"
mode -- the pooling mode you would like to use, defined as a string ("max" or "average")
Returns:
A -- output of the pool layer, a numpy array of shape (m, n_H, n_W, n_C)
cache -- cache used in the backward pass of the pooling layer, contains the input and hparameters
"""
(m, n_H_prev, n_W_prev, n_C_prev) = A_prev.shape
f = hparameters["f"]
stride = hparameters["stride"]
n_H = int(1 + (n_H_prev - f) / stride)
n_W = int(1 + (n_W_prev - f) / stride)
n_C = n_C_prev
A = np.zeros((m, n_H, n_W, n_C))
for i in range(m): # loop over the training examples
for h in range(n_H): # loop on the vertical axis of the output volume
vert_start = h * stride
vert_end = vert_start + f
for w in range(n_W): # loop on the horizontal axis of the output volume
horiz_start = w * stride
horiz_end = horiz_start + f
for c in range(n_C): # loop over the channels of the output volume
a_prev_slice = A_prev[i, vert_start:vert_end, horiz_start:horiz_end, c]
if mode == "max":
A[i, h, w, c] = np.max(a_prev_slice)
elif mode == "average":
A[i, h, w, c] = np.mean(a_prev_slice)
# Store the input and hparameters in "cache" for pool_backward()
cache = (A_prev, hparameters)
assert (A.shape == (m, n_H, n_W, n_C))
return A, cache
四、反向传播
一般只需要实现前向传播,深度学习的框架会做反向传播。 卷积神经网络(CNN)反向传播算法
