我新换一部智能手机后,一般会忍不住将所有设置菜单功能体验一遍,虽然设置层层叠叠,但能将手机设置成自己喜欢的样子还是颇有成就感的。
类同智能手机,微机保护等工业产品随着各种功能的增加,各种各样的设置也变得繁杂起来。微机保护产品有很多类型的设定值,如遥测越限值,如设备通讯状态等,但其中有一类设定值比较特殊,就是保护功能相关设定值,我们团队习惯称之为保护设定值。
保护设定值用于配置保护功能,如过流保护有两个最基本的设定值:过流设定值ISet和时间设定值t,如下图所示。
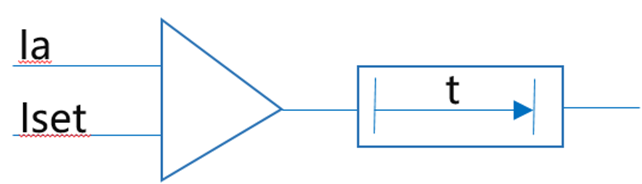
当电流Ia大于设定值ISet,且保持时间超过t时,过流保护触发,然后驱动出口继电器跳开电力断路器,切除故障。
相比于其他设定值,保护设定值有一些特殊性:
- 保护设定值必须整体修改,如过流保护将ISet和t两个定值分开逐个修改,就有可能导致保护设备误动作。保护功能是强实时模块,是通过中断触发,而应用模块内定值是一个个依次写入的,如在多个写入之间触发保护逻辑,就有可能误动作。
- 定值修改过程中需要暂时闭锁保护功能,相当于一段时间内电力设备在无防护的状态下运行,因此必须将该过程压缩到小于设备带故障运行时间(一般以ms计)。但不管是通过液晶修改设定值,还是通过维护软件修改设定值,其过程都比较长。
- 随着微机保护集成的功能越来越多,设定值数量也在持续增加,不仅给用户带来了使用负担,规约传输时也经常要分多帧传输。
- 设定值对安全性、完整性等要求很高。
为了保证保护设定值能在短时间内整体写入,必须增加中间缓冲区,且将所有的读写操作都基于缓冲区,最后阶段,在闭锁保护功能的前提下将整个缓冲区整体写入。
假设有一规约对象,需要完成上述功能,大概需要如下几部分代码逻辑:
- 初始化时刻开辟缓冲区,缓冲区大小可以通过读取设定值个数apiSettingCount()获取。
DWORD dwSize = sizeof(FLOAT) * apiSettingCount() + 4; /* +4,存储CRC校验码 */
FLOAT *pSettingBuf = (FLOAT*)hwMalloc(dwSize, HW_MALLOC_NORMAL);
- 远传设定值不需要用到缓冲区,可以直接基于序号读取。
DWORD dwCount = apiSettingCount();
for (i = 0; i < dwCount; i++)
{
*pReadBuf++ = apiSettingGet(i); /* pReadBuf指向规约远传帧内存空间 */
}
- 写操作比较麻烦,可能接受到的定值可能不完整(大部分情况下用户仅修改部分设定值),也可能因为改写定值较多需要分多帧传输,而且还需要在定值传输完毕后,将整个缓冲区写入。代码示例如下:
/* 如果接受是第一帧,首先用默认值填充缓冲区 */
if (bFirst)
{
DWORD dwCount = apiSettingCount();
FLOAT *pBuf = pSettingBuf;
for (i = 0; i < dwCount; i++)
*pBuf++ = apiSettingGet(i);
}
/* 将接受到的定值写入缓冲区相应位置 */
for (;;)
...
/* 如果是最后一帧,需要执行定值投入操作 */
if (bEnd)
{
/* 闭锁保护 */
...
/* 将缓冲区中的定值整体写入 */
apiSettingLaunch(pSettingBuf);
/* 解锁保护闭锁 */
...
}
如果是液晶设定值修改界面,基本流程同规约对象,也需要构建缓冲区,唯独读操作存在差异。规约对象的读和写是完全分离的,而通过液晶界面修改定值时,读和写操作都必须基于缓冲区,不然会导致刚写的定值读不出来。
现在来细细分析上述代码示例,我们很容易发现一些不舒服的地方,如:
- 每个规约和液晶对象都需要分配一块缓冲区,考虑定值和规约数量都比较多,对于内存是稀缺资源的工业嵌入式设备是奢侈的行为。
- 各应用模块重复一些列关于缓冲区的操作,代码冗余。
- 同步问题,规约修改缓冲区过程中,液晶可能在同时修改定值。
- 缓冲区的管理缺失,如果通讯意外中断,原有缓冲区中的脏数据如何处理。
很多问题在别处可能已经有了答案。为了进一步提炼优化保护设定值的接口,我们引入了数据库中的“事务”概念,将对缓冲区的操作全部内化到接口函数内部。此时,关键的几个接口函数如下:
/*
* Description: 启动定值读写事务
* Input:
* DWORD dwTimeout: 超时,在超时时间内如没有读写操作,事务自动撤销。
* Return: 成功返回TRUE,否则返回FALSE
* Others: 为了防止系统锁死,超时有最大限制,不允许无穷等待。为了防止事务被取消,需增加读写操作。
*/
BOOL apiSettingStart(DWORD dwTimeout);
/*
* Description: 读取单个定值
* Input:
* DWORD dwIndex: 定值索引
* Return: 成功返回定值,否则返回0.0f
* Others: 如包含在事务内时,读取事务内定值,否则读取真实定值。
*/
FLOAT apiSettingGet(DWORD dwIndex);
/*
* Description: 改写单个定值
* Input:
* DWORD dwIndex: 定值索引
* FLOAT fSetting: 改写定值
* Return: 成功返回TRUE,否则返回FALSE
* Others: 必须包含在事务内,否则失败。写定值内部会进行边界判断,失败返回FALSE。
*/
BOOL apiSettingSet(DWORD dwIndex, FLOAT fSetting);
/* 定值事务提交 */
BOOL apiSettingCommit(void);
/* 定值事务撤销 */
void apiSettingCancel(void);
借助于事务概念接口,各应用程序立马简洁了很多,而且事务接口额外提供了一种互斥策略,假如规约正在修改定值,液晶界面想去修改定值,事务请求会直接失败返回。
在微机保护装置内部,很多简单模块的接口提炼过程都非常类似保护设定值,先分析汇总各应用模块相关功能流程,然后“切”出最佳边界。当然需求可能会持续变化,接口也会持续成长,然后慢慢收敛并稳定下来。
——————————————
我是小马儿,一个渴望良知与灵魂的嵌入式软件工程师,欢迎您的陪伴与同行,如感兴趣可加个人微信号nzn_xiaomaer交流,需备注“异维”二字。
