Anchor Boxes
到目前为止,对象检测中存在的一个问题是每个格子只能检测出一个对象,如果你想让一个格子检测出多个对象,你可以这么做,就是使用anchor box这个概念,我们从一个例子开始讲吧。
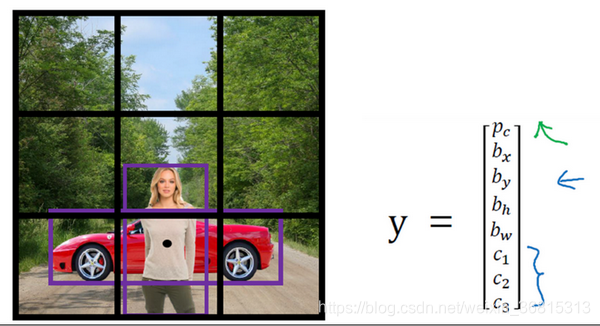
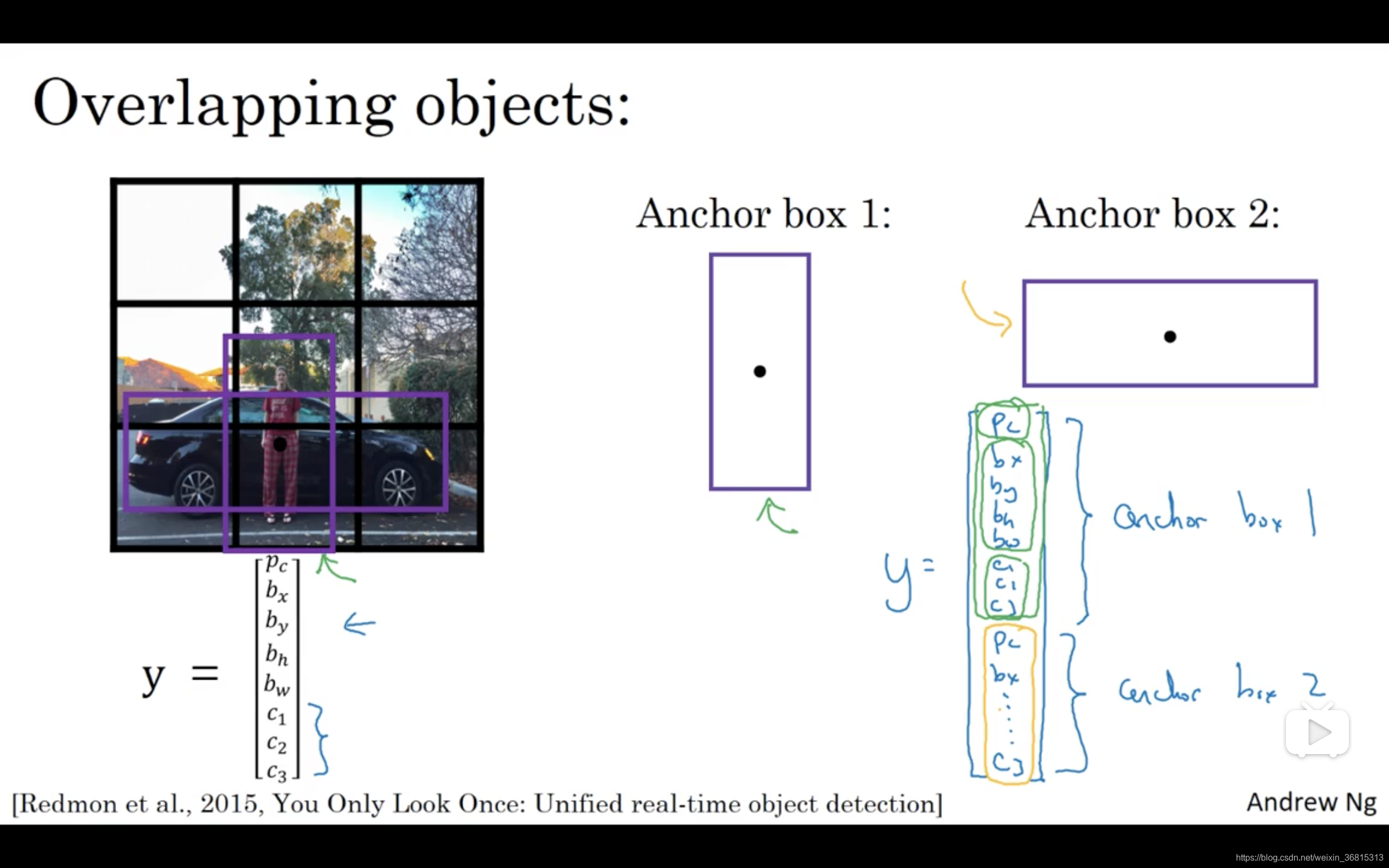
假设你有这样一张图片,对于这个例子,我们继续使用3×3网格,注意行人的中点和汽车的中点几乎在同一个地方,两者都落入到同一个格子中。所以对于那个格子,如果 输出这个向量 ,你可以检测这三个类别,行人、汽车和摩托车,它将无法输出检测结果,所以我必须从两个检测结果中选一个。
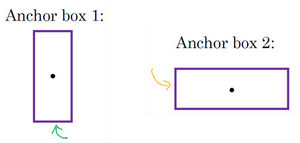
而anchor box的思路是,这样子,预先定义两个不同形状的anchor box,或者anchor box形状,你要做的是把预测结果和这两个anchor box关联起来。一般来说,你可能会用更多的anchor box,可能要5个甚至更多,但对于这个视频,我们就用两个anchor box,这样介绍起来简单一些。
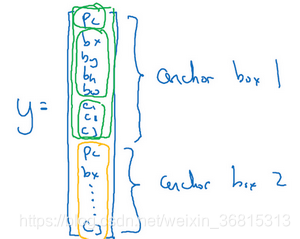
你要做的是定义类别标签,用的向量不再是上面这个 ,而是重复两次, ,前面的 (绿色方框标记的参数)是和anchor box 1关联的8个参数,后面的8个参数(橙色方框标记的元素)是和anchor box 2相关联。因为行人的形状更类似于anchor box 1的形状,而不是anchor box 2的形状,所以你可以用这8个数值(前8个参数),这么编码 ,是的,代表有个行人,用 和 来编码包住行人的边界框,然后用 ( )来说明这个对象是个行人。
然后是车子,因为车子的边界框比起anchor box 1更像anchor box 2的形状,你就可以这么编码,这里第二个对象是汽车,然后有这样的边界框等等,这里所有参数都和检测汽车相关( )。
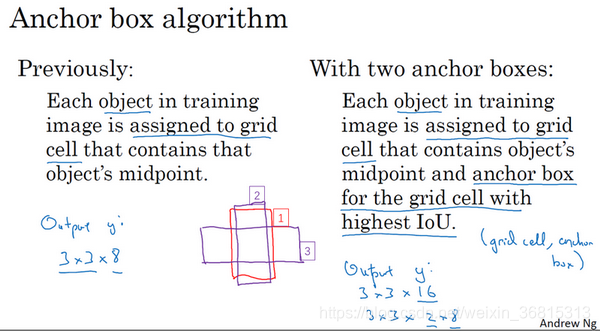
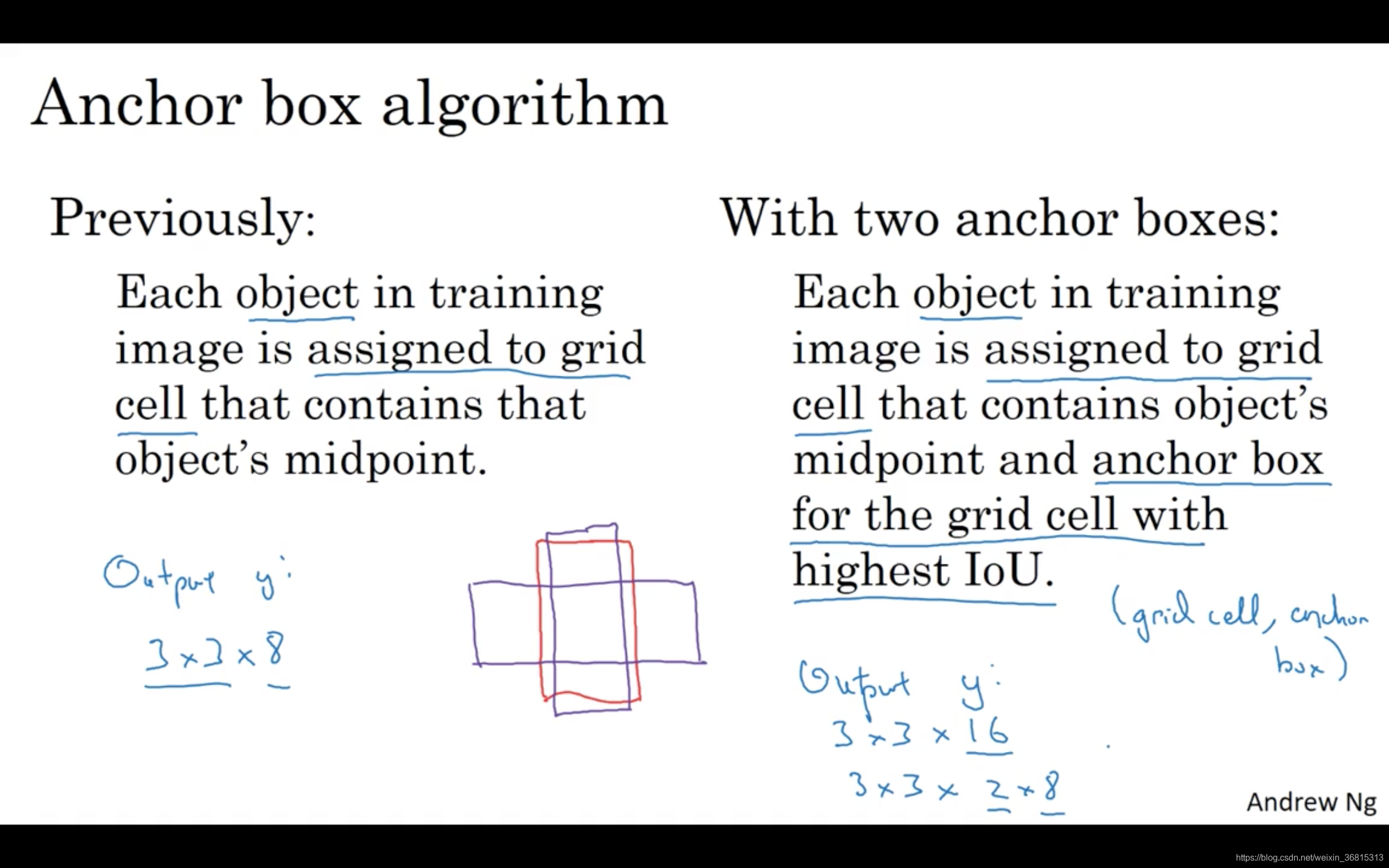
总结一下,用anchor box之前,你做的是这个,对于训练集图像中的每个对象,都根据那个对象中点位置分配到对应的格子中,所以输出 就是3×3×8,因为是3×3网格,对于每个网格位置,我们有输出向量,包含 ,然后边界框参数 和 ,然后 。
现在用到anchor box这个概念,是这么做的。现在每个对象都和之前一样分配到同一个格子中,分配到对象中点所在的格子中,以及分配到和对象形状交并比最高的anchor box中。所以这里有两个anchor box,你就取这个对象,如果你的对象形状是这样的(编号1,红色框),你就看看这两个anchor box,anchor box 1形状是这样(编号2,紫色框),anchor box 2形状是这样(编号3,紫色框),然后你观察哪一个anchor box和实际边界框(编号1,红色框)的交并比更高,不管选的是哪一个,这个对象不只分配到一个格子,而是分配到一对,即(grid cell,anchor box)对,这就是对象在目标标签中的编码方式。所以现在输出 就是3×3×16,上一张幻灯片中你们看到 现在是16维的,或者你也可以看成是3×3×2×8,因为现在这里有2个anchor box,而 是8维的。 维度是8,因为我们有3个对象类别,如果你有更多对象,那么 的维度会更高。

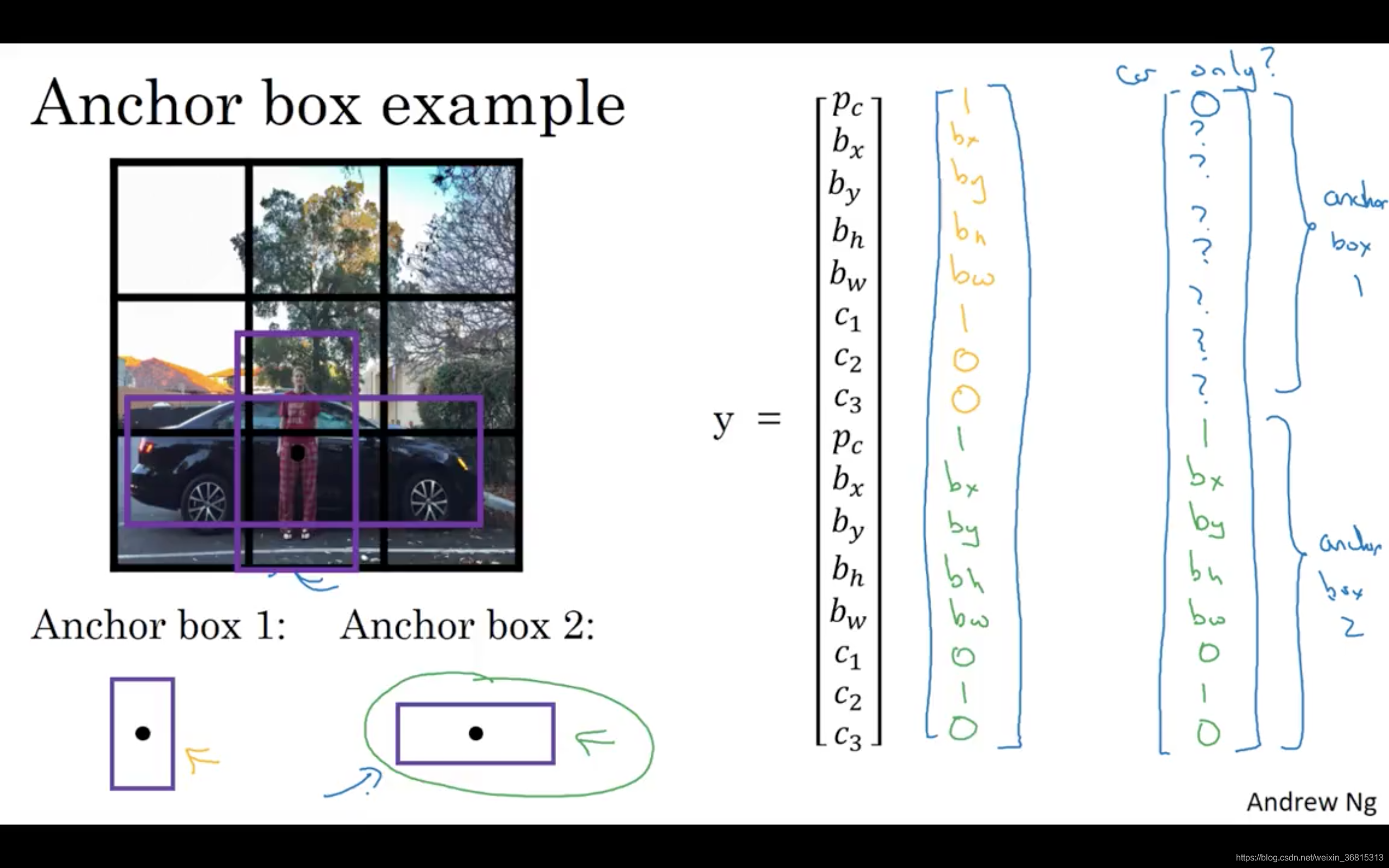
所以我们来看一个具体的例子,对于这个格子(编号2),我们定义一下 : 。
所以行人更类似于anchor box 1的形状,所以对于行人来说,我们将她分配到向量的上半部分。是的,这里存在一个对象,即 ,有一个边界框包住行人,如果行人是类别1,那么 (编号1所示的橙色参数)。车子的形状更像anchor box 2,所以这个向量剩下的部分是 ,然后和车相关的边界框,然后 (编号1所示的绿色参数)。所以这就是对应中下格子的标签 ,这个箭头指向的格子(编号2所示)。
现在其中一个格子有车,没有行人,如果它里面只有一辆车,那么假设车子的边界框形状是这样,更像anchor box 2,如果这里只有一辆车,行人走开了,那么anchor box 2分量还是一样的,要记住这是向量对应anchor box 2的分量和anchor box 1对应的向量分量,你要填的就是,里面没有任何对象,所以 ,然后剩下的就是don’t care-s(即?)(编号3所示)。
现在还有一些额外的细节,如果你有两个anchor box,但在同一个格子中有三个对象,这种情况算法处理不好,你希望这种情况不会发生,但如果真的发生了,这个算法并没有很好的处理办法,对于这种情况,我们就引入一些打破僵局的默认手段。还有这种情况,两个对象都分配到一个格子中,而且它们的anchor box形状也一样,这是算法处理不好的另一种情况,你需要引入一些打破僵局的默认手段,专门处理这种情况,希望你的数据集里不会出现这种情况,其实出现的情况不多,所以对性能的影响应该不会很大。
这就是anchor box的概念,我们建立anchor box这个概念,是为了处理两个对象出现在同一个格子的情况,实践中这种情况很少发生,特别是如果你用的是19×19网格而不是3×3的网格,两个对象中点处于361个格子中同一个格子的概率很低,确实会出现,但出现频率不高。也许设立anchor box的好处在于anchor box能让你的学习算法能够更有征对性,特别是如果你的数据集有一些很高很瘦的对象,比如说行人,还有像汽车这样很宽的对象,这样你的算法就能更有针对性的处理,这样有一些输出单元可以针对检测很宽很胖的对象,比如说车子,然后输出一些单元,可以针对检测很高很瘦的对象,比如说行人。
最后,你应该怎么选择anchor box呢?人们一般手工指定anchor box形状,你可以选择5到10个anchor box形状,覆盖到多种不同的形状,可以涵盖你想要检测的对象的各种形状。还有一个更高级的版本,我就简单说一句,你们如果接触过一些机器学习,可能知道后期YOLO论文中有更好的做法,就是所谓的k-平均算法,可以将两类对象形状聚类,如果我们用它来选择一组anchor box,选择最具有代表性的一组anchor box,可以代表你试图检测的十几个对象类别,但这其实是自动选择anchor box的高级方法。如果你就人工选择一些形状,合理的考虑到所有对象的形状,你预计会检测的很高很瘦或者很宽很胖的对象,这应该也不难做。
所以这就是anchor box,在下一个视频中,我们把学到的所有东西一起融入到YOLO算法中。
课程板书