一.基础概念
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速,停止的位置只取决于脉冲信号的频率和脉冲数。
即,给电机一个脉冲信号,电机则转过一个步距角。
相:指步进电机有几个线圈(绕组)。常见2相,4相电机。
线:指步进电机有几个接线口(多少根线)。
极性:分为单极性和双极性。如果步进电机的线圈是可以双向导电的,则为双极性;若线圈只允许单向导电,则为单极性。
步进电机的步进方式:单拍,双拍,单双拍
单拍:每次只给一个线圈通电,通过改变每次通电的线圈从而使步进电机转动。
对应五线四相步进电机,在单拍工作方式下,线圈的通电方式依次是:
A-COM-B-COM-C-COM-D-COM-E-COM

对于四线双极性步进电机,在单拍工作方式下,线圈依次是A-A' B-B' C-C' D-D
双拍:每次给两个线圈通电,通过改变通电的线圈从而使步进电机转动

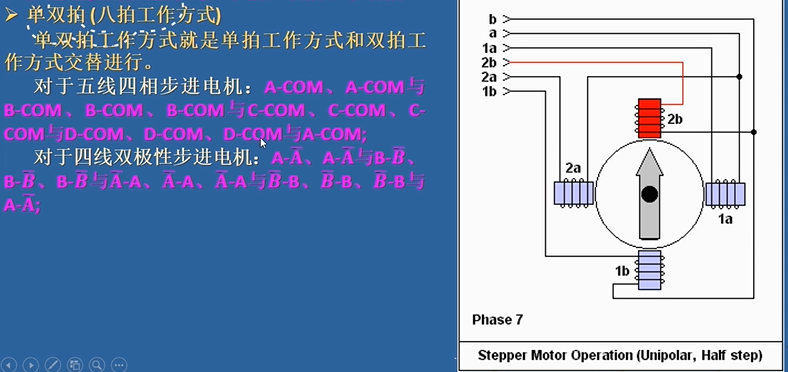
单双拍:单拍和双拍工作方式交替进行
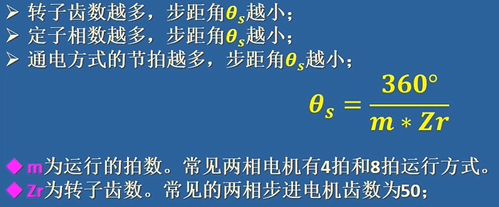
步距角
当步进电机切换一次定子绕组的激磁电流时,转子就旋转一个固定角度即步距角。步距角由切换的相电流产生的旋转力矩得到。
步距角大小与控制绕组的相数,转子齿数和通电方式相关。步距角越小,运转的平稳性越好。