- 显示运动轨迹
1.1 Ubuntu18.04 Pangolin 安装
1.2. 遇到的问题:
关于trajectory
错误:cannot find trajectory file at ./examples/trajectory.txt
string trajectory_file = "./example/trajectory.txt";
修改方法:改成自己的文件路径
1.3 实验结果:
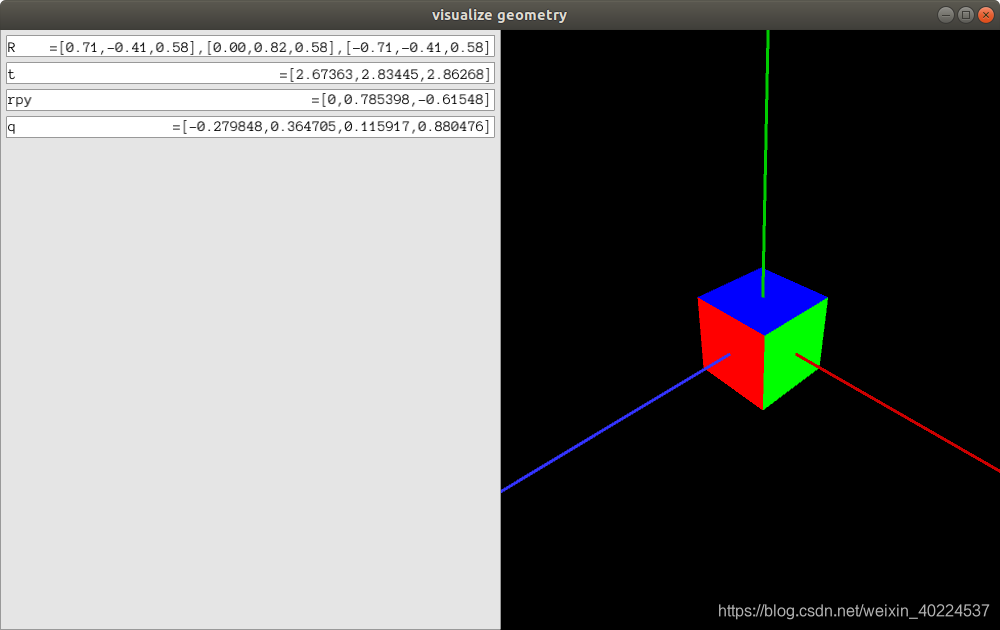
2. 显示相机位姿
实验结果:
 3. 相关代码的理解
3. 相关代码的理解
3.1
vector<Eigen::Matrix4d,Eigen::aligned_allocator<Eigen::Matrix4d>>;
上述的这段代码是标准的定义容器方法,只是一般情况下定义容器的元素都是C++中的类型,所以可以省略,这是因为在C++11标准中,aligned_allocator管理C++中的各种数据类型的内存方法是一样的,可以不需要着重写出来。但是在Eigen管理内存和C++11中的方法是不一样的,所以需要单独强调元素的内存分配和管理>。相当于:(编译不会出错,只有在运行的时候出错)
vector<Eigen::Matrix4d>;
3.2
OpenGL函数_ gl.glenable()详细介绍
3.3
OpenGL glBlendFunc() 设置颜色混合 透明度叠加计算
3.4
【OpenGL API】 glLineWidth
3.5
openGL的glVertex()函数的用法
