前言
在提取特征点之后,我们往往需要采取一定的策略来对特征点进行匹配,但在某些场合,库中提供的匹配也许并不能满足我们的需求,需要我们自己来实现匹配算法。因此,这就要求我们对提取出来的特征描述子进行操作。compute方法可以提取特征点的特征描述子,并存储在一个矩阵(Mat)中,但是当我查看源码,想搞清楚矩阵中元素与特征点的对应关系时,却发现compute的函数说明似乎有点问题。
提取特征描述子的步骤
Mat descriptors1;
Mat descriptors2;
ptrFeature2D->compute(image1,keypoints1,descriptors1);
ptrFeature2D->compute(image2,keypoints2,descriptors2);
Compute函数原型:
CV_WRAP virtual void compute( InputArray image,
CV_OUT CV_IN_OUT std::vector<KeyPoint>& keypoints,
OutputArray descriptors );
```
描述:
@param image Image.
@param keypoints Input collection of keypoints. Keypoints for which a descriptor cannot be
computed are removed. Sometimes new keypoints can be added, for example: SIFT duplicates keypoint with several dominant orientations (for each orientation).
@param descriptors Computed descriptors. In the second variant of the method descriptors[i] are descriptors computed for a keypoints[i]. Row j is the keypoints (or keypoints[i]) is the descriptor for keypoint j-th keypoint. (这句话是啥意思我是没看懂)
参数解释:
img :要描述的图像
keypoints :被检测到的特征点
descriptors1: 输出的特征描述子矩阵
自己动手 丰衣足食
验证keypoints 与 descirptor之间的对应关系:
测试代码(定义那些就省去了。)
Ptr<cv::xfeatures2d::SURF>detector = cv::xfeatures2d::SURF::create(Hessian_Threshold);
vector<KeyPoint> keypoints;
detector->detect(gray_img, keypoints, Mat()); //检测关键点
detector->compute(gray_img, keypoints, descriptors1);
cout << "the nums of keypoints:" << keypoints.size() << '\n' << "descriptor size: " << descriptors1.size();
实验结果: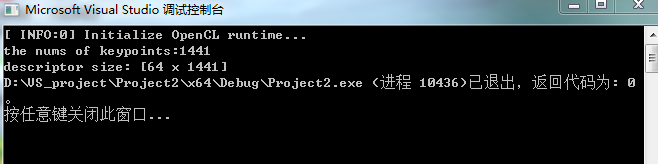
分析与总结
特征点一共有1441个,SURF的特征向量为64维,因此:
储存特征描述子的矩阵应该是: 行数表示特征分量,列数表示第几个特征点的特征向量
