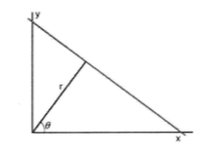
要理解SHT-TBD就要理解什么是SHT即标准霍夫变换。首先,标准霍夫变换可以检测直线。那么它是怎样检测直线的呢?在x-y二维坐标系的一条直线映射到极坐标系下,可以在极坐标系下用参数ρ和θ表示。即y = -x/tanθ + ρ/sinθ,这里的ρ是原点到直线的距离,而θ是直线与x轴的夹角,可取0到Π。当然,直线也可以表示成ρ = xcosθ + ysinθ。由于在电脑进行处理时,一般是将平面存到一个矩阵中。
那么假设一点是(x0,y0),那么过这一点的所有直线的表达式可以写成什么呢?即ρi = xcosθi + ysinθi,这里的i可以取无穷,那么我们就会发现原来过一点的无数条直线在映射到极坐标后居然是一条正弦曲线。
如果假设将过(x0,y0)的所有直线与过(x1,y1)的所有直线映射到极坐标系下,我们会发现这两条正弦曲线交于一点,其实从这里我们就会发现在映射的及坐标系下,任意的两条正弦曲线肯定会有一个交点。如果是三点呢?我们会发现映射的三条正弦曲线交于一点。这时候我们就了解了原来只要是在一条直线上的点在映射到极坐标系后那些正弦曲线都会交于一点。
检测前目标跟踪在雷达系统中的应用(二):标准霍夫变换

猜你喜欢
转载自blog.csdn.net/qq_40287633/article/details/105149597
今日推荐
周排行