#include <pylon\PylonIncludes.h>
#include <pylon\PylonGUIIncludes.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace Pylon;
using namespace cv;
void main()
{
VideoCapture capture(1);
if (!capture.isOpened())
{
printf("Open camera is failed");
system("pause");
return ;
}
// // 设置摄像头的拍摄属性为 分辨率640x480,帧率30fps
capture.set(CV_CAP_PROP_FRAME_HEIGHT, 1024 );
capture.set(CV_CAP_PROP_FRAME_WIDTH, 1280 );
capture.set(CAP_PROP_FPS, 30.0);
// //获得帧率
double frameCount = capture.get(CV_CAP_PROP_FPS);
VideoWriter writer("VideoTest.avi", CV_FOURCC('M', 'J', 'P', 'G'), frameCount, Size(1280, 1024));
while (capture.isOpened())
{
Mat frame;
if ((frame.rows != 0) || (frame.cols != 0))
{
printf("frame capture failed\n");
system("pause");
exit(0);
}
capture >> frame;
writer << frame;
imshow("VideoPlay", frame);
if (waitKey(3) == 27 || waitKey(3) == 32 || waitKey(3) == 13)
{
break;
}
}
// 释放相关对象
capture.release();
writer.release();
}
-------------------------------------------
#include <pylon\PylonIncludes.h>
#include <pylon\PylonGUIIncludes.h>
//#include <opencv2/core/core.hpp>
//#include <opencv2/highgui/highgui.hpp>
#include <opencv.hpp>
using namespace Pylon;
using namespace cv;
#define EXE_OpenBaslerCamera 0
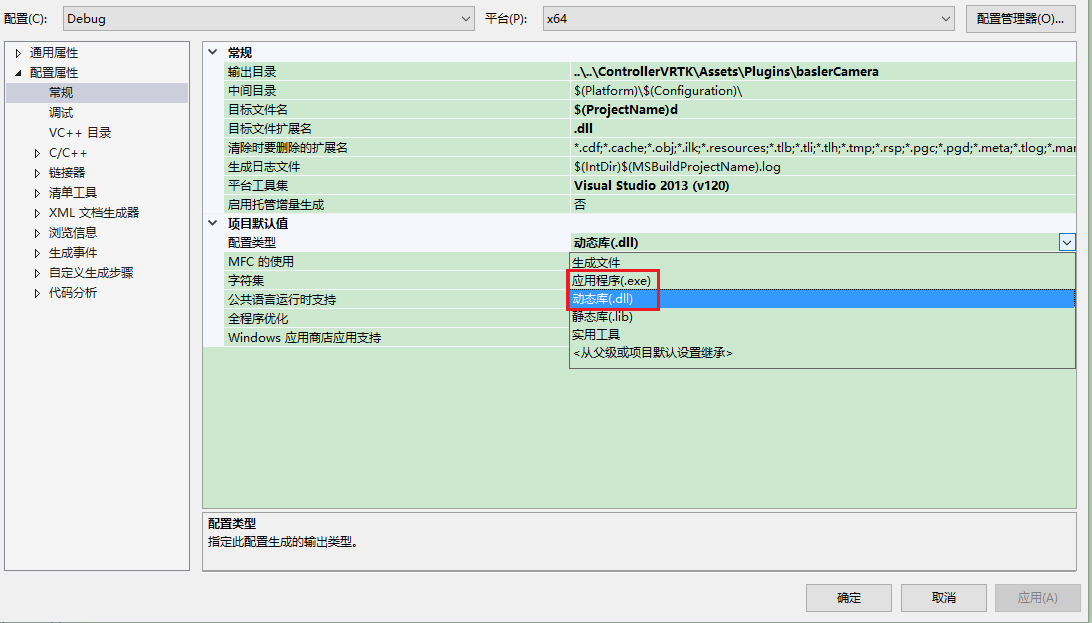
#define DLL_OpenBaslerCamera 10
#if DLL_OpenBaslerCamera
#define EXPORT_API __declspec(dllexport)
VideoCapture basler_camera;
VideoWriter writer_Video("F://Buffers//Bandicam//VideoTest.avi", CV_FOURCC('M', 'J', 'P', 'G'), 25, Size(1280, 1024));
extern "C" bool EXPORT_API openCamera()
{
bool isOpen = false;
while (!basler_camera.isOpened())
{
std::cout << "Cannot open the camera!" << std::endl;
//0123
basler_camera.open(3);
}
basler_camera.set(CV_CAP_PROP_FRAME_WIDTH, 1280);
basler_camera.set(CV_CAP_PROP_FRAME_HEIGHT, 1024);
if (basler_camera.isOpened())
{
isOpen = true;
//保存
double frameCount = basler_camera.get(CV_CAP_PROP_FPS);
}
return isOpen;
}
extern "C" void EXPORT_API recieveFrame(uchar* texturePtr)
{
Mat my_frameBGR;
Mat my_frameRBG;
basler_camera >> my_frameBGR;
//写视频
writer_Video << my_frameBGR;
if (my_frameBGR.data)
{
cvtColor(my_frameBGR, my_frameRBG, CV_BGR2RGB);
memcpy(texturePtr, my_frameRBG.data, my_frameRBG.cols*my_frameRBG.rows*my_frameRBG.channels()*sizeof(uchar));
}
}
extern "C" void EXPORT_API closeCamera()
{
if (basler_camera.isOpened())
{
basler_camera.release();
writer_Video.release();
}
}
#endif
#if EXE_OpenBaslerCamera
void main()
{
VideoCapture capture(3);
if (!capture.isOpened())
{
printf("Open camera is failed");
system("pause");
return ;
}
// // 设置摄像头的拍摄属性为 分辨率640x480,帧率30fps
capture.set(CV_CAP_PROP_FRAME_HEIGHT, 1024 );
capture.set(CV_CAP_PROP_FRAME_WIDTH, 1280 );
//capture.set(CAP_PROP_FPS, 30.0);
// //获得帧率
double frameCount = capture.get(CV_CAP_PROP_FPS);
VideoWriter writer("VideoTest.avi", CV_FOURCC('M', 'J', 'P', 'G'), frameCount, Size(1280, 1024));
while (capture.isOpened())
{
Mat frame;
if ((frame.rows != 0) || (frame.cols != 0))
{
printf("frame capture failed\n");
system("pause");
exit(0);
}
capture >> frame;
writer << frame;
imshow("VideoPlay", frame);
if (waitKey(3) == 27 || waitKey(3) == 32 || waitKey(3) == 13)
{
break;
}
}
// 释放相关对象
capture.release();
writer.release();
}
#endif