假设有个一维的方格,初始位置为均匀分布(因为不知道任何信息)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ZPXX8wne-1582964155307)(./loc000.png)]](https://img-blog.csdnimg.cn/2020022916163835.png)
测量更新
测量当前方格颜色之后,计算所有方格概率分布
#Modify your code so that it normalizes the output for
#the function sense. This means that the entries in q
#should sum to one.
p=[0.2, 0.2, 0.2, 0.2, 0.2]
world=['green', 'red', 'red', 'green', 'green']
Z = 'red'
pHit = 0.6
pMiss = 0.2
def sense(p, Z):
q=[]
for i in range(len(p)):
hit = (Z == world[i])
q.append(p[i] * (hit * pHit + (1-hit) * pMiss))
s=sum(q)
for i in range(len(q)):
q[i] = q[i]/s
return q
print(sense(p,Z))
[0.1111111111111111, 0.3333333333333332, 0.3333333333333332, 0.1111111111111111, 0.1111111111111111]
运动更新
假设移动一步,重新计算方格概率分布
p=[0.2, 0.2, 0.2, 0.2, 0.2]
def move(p, U):
#
#ADD CODE HERE
#
q = []
if U<0:
U = U+len(p)
num = U%len(p)
for i in range(len(p)-num,len(p)):
q.append(p[i])
for i in range(len(p)-num):
q.append(p[i])
return q
print(move(p, 1))
[0.2, 0.2, 0.2, 0.2, 0.2]
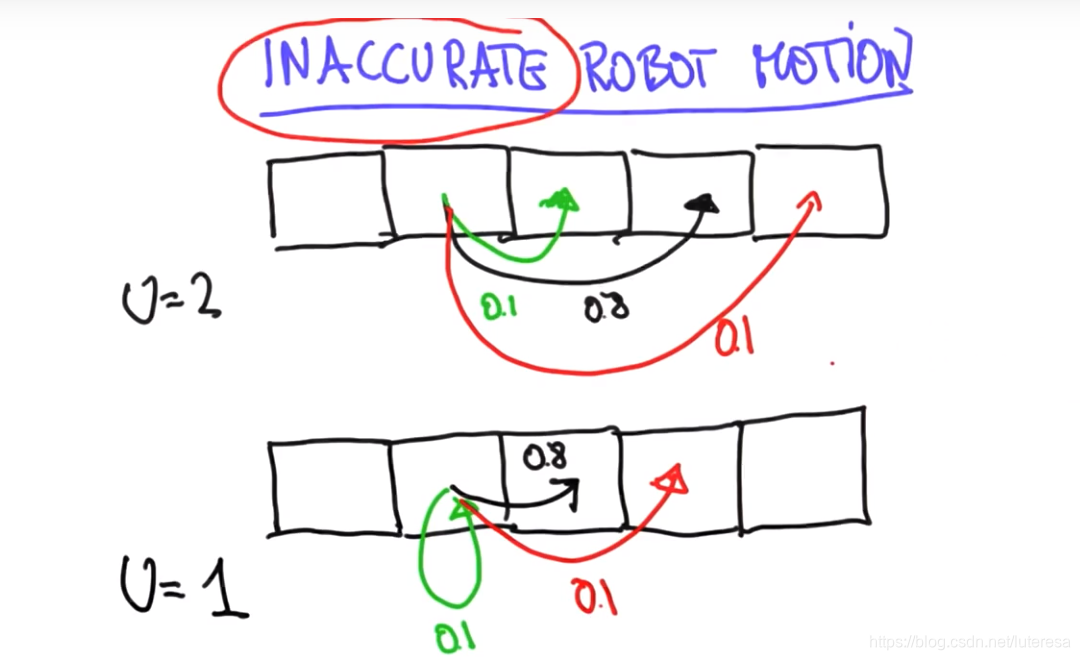
非准确的移动
实际的运动,不太会是完美的运动学,受外部或自身因素影响,会存在一定概率偏差(比如路滑,或者风)
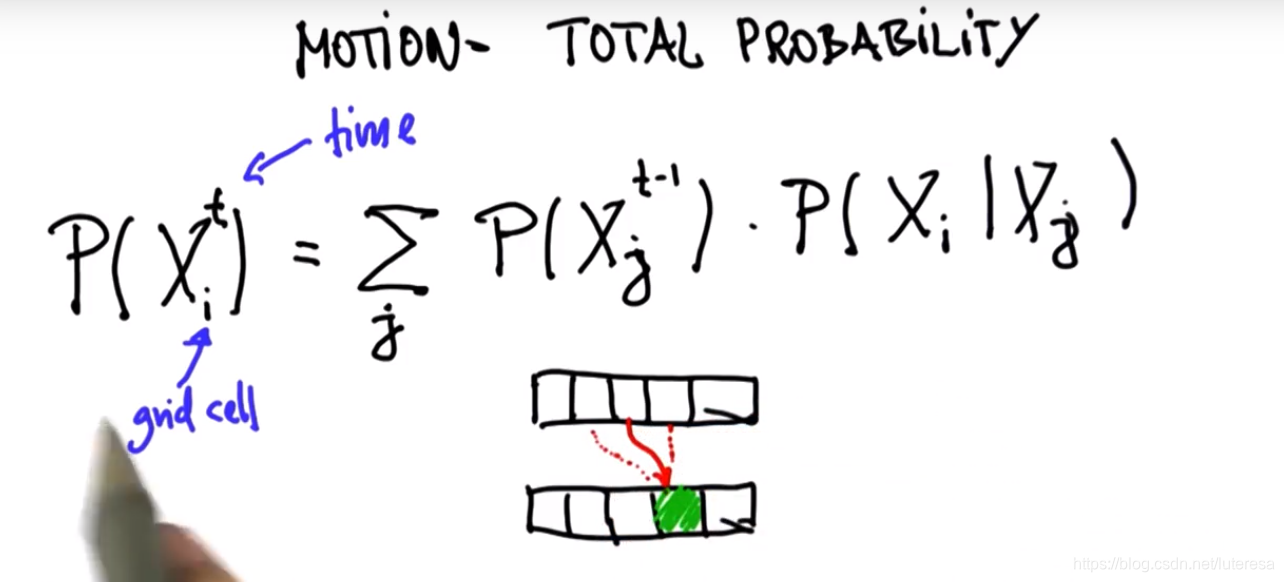
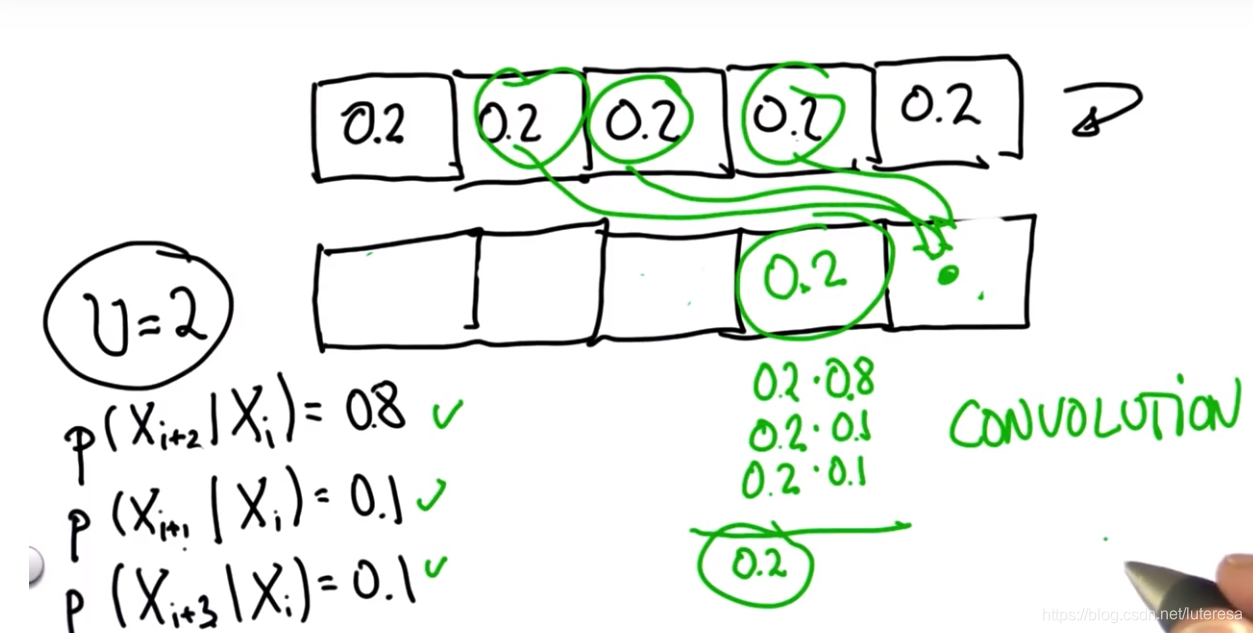
计算概率方式:全概率公式
#Modify the move function to accommodate the added
#probabilities of overshooting or undershooting
#the intended destination.
p=[0, 1, 0, 0, 0]
world=['green', 'red', 'red', 'green', 'green']
measurements = ['red', 'green']
pHit = 0.6
pMiss = 0.2
pExact = 0.8
pOvershoot = 0.1
pUndershoot = 0.1
def sense(p, Z):
q=[]
for i in range(len(p)):
hit = (Z == world[i])
q.append(p[i] * (hit * pHit + (1-hit) * pMiss))
s = sum(q)
for i in range(len(q)):
q[i] = q[i] / s
return q
def move(p, U):
q = []
for i in range(len(p)):
q.append(p[(i-U)%len(p)]*pExact+p[(i-U-1)%len(p)]*pOvershoot+p[(i-U+1)%len(p)]*pUndershoot)
return q
print(move(p, 1))
[0.0, 0.1, 0.8, 0.1, 0.0]
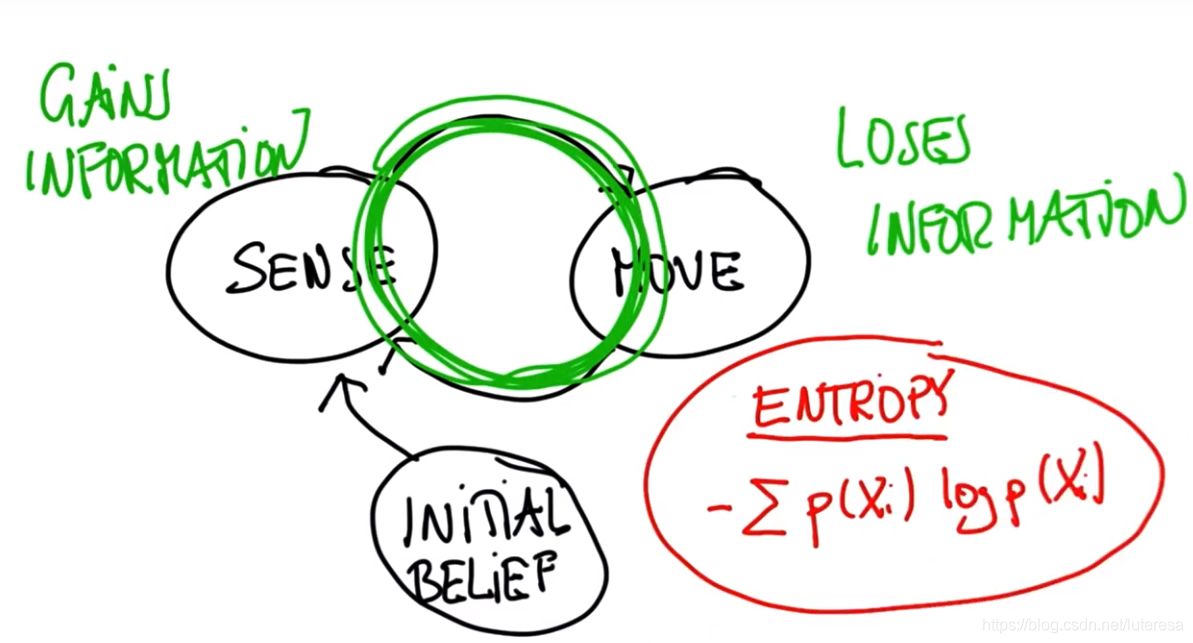
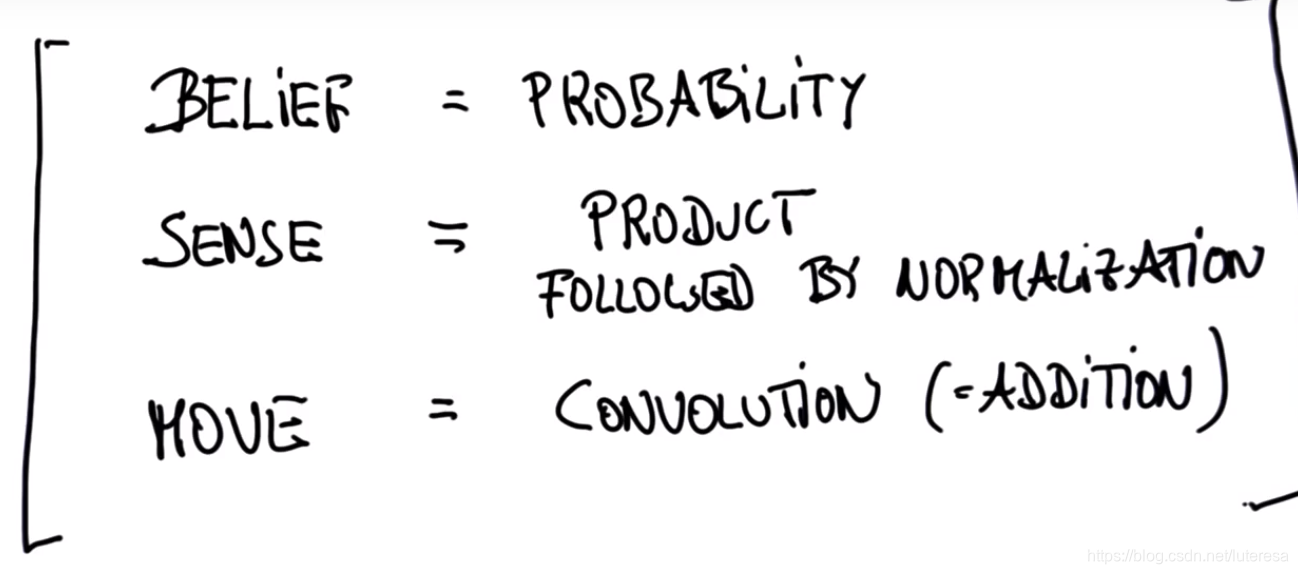
贝叶斯公式模型
包含两个部分,测量更新和预测更新:
测量更新:提高准确性(因为获得准确信息,测量值),用贝叶斯公式;
运动更新:一般是用运动模型来预测,会降低准确性(运动会有误差,丢失信息),用全概率公式;
贝叶斯模型,就是测量更新和运动更新的不停循环。
#Given the list motions=[1,1] which means the robot
#moves right and then right again, compute the posterior
#distribution if the robot first senses red, then moves
#right one, then senses green, then moves right again,
#starting with a uniform prior distribution.
#Modify the previous code so that the robot senses red twice.
p=[0.2, 0.2, 0.2, 0.2, 0.2]
world=['green', 'red', 'red', 'green', 'green']
measurements = ['red', 'red']
motions = [1,1]
pHit = 0.6
pMiss = 0.2
pExact = 0.8
pOvershoot = 0.1
pUndershoot = 0.1
def sense(p, Z):
q=[]
for i in range(len(p)):
hit = (Z == world[i])
q.append(p[i] * (hit * pHit + (1-hit) * pMiss))
s = sum(q)
for i in range(len(q)):
q[i] = q[i] / s
return q
def move(p, U):
q = []
for i in range(len(p)):
s = pExact * p[(i-U) % len(p)]
s = s + pOvershoot * p[(i-U-1) % len(p)]
s = s + pUndershoot * p[(i-U+1) % len(p)]
q.append(s)
return q
for k in range(len(measurements)):
p = sense(p, measurements[k])
p = move(p, motions[k])
print(p)
[0.07882352941176471, 0.07529411764705884, 0.22470588235294123, 0.4329411764705882, 0.18823529411764706]
贝叶斯模型的数学原理
定义初始分布为先验概率X,测量值为后验概率Z
测量更新,即求p(x|z)
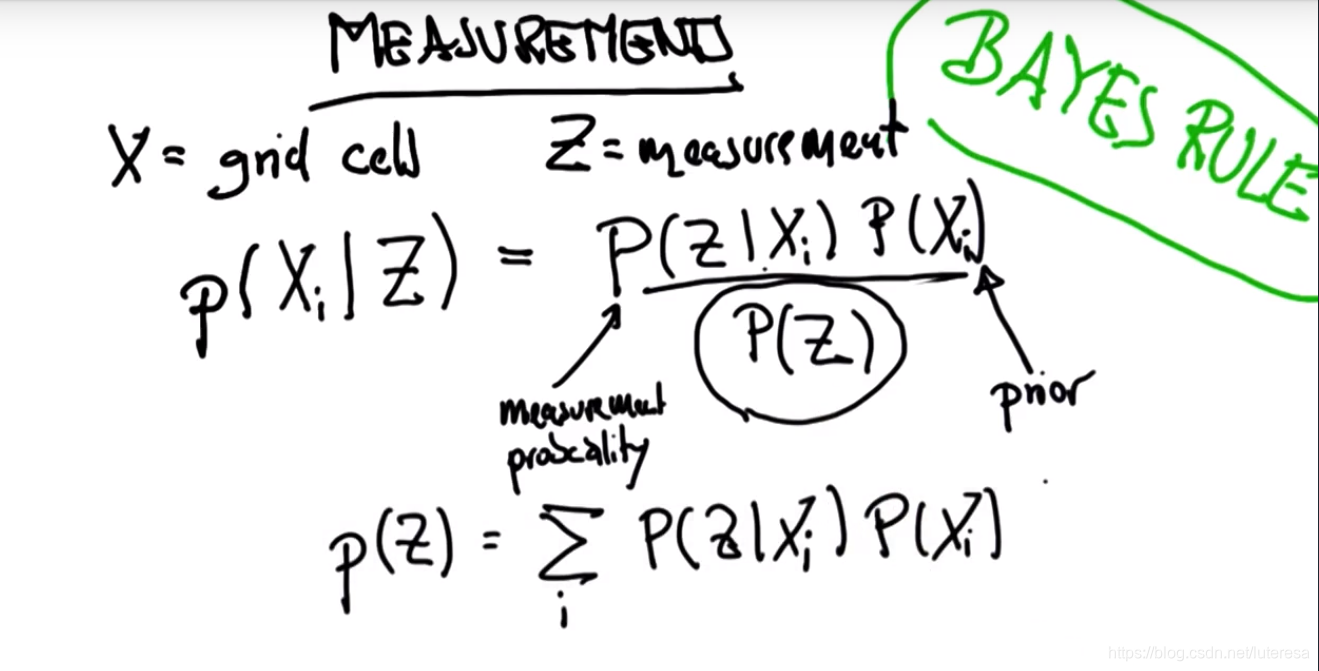
运动更新由全概率公式计算: