零之前言
节点之间是通过一个ROS话题来互相通信的。A节点在一个话题上发布按键输入消息,而B节点则订阅该话题以接收该消息。
根据ROS Wiki上的描述,我们很轻松可以知道,消息与话题的关系,通信机制是话题,而消息只是话题的数据结构。
ROS在命令行中可以通过命令查看话题及其使用的消息,也有可视化查看话题的工具,详细的使用方法,可以查看ROS wiki上的理解ROS话题
根据我们创建消息,你会发现,它更像是C语言中的结构体。
一.创建一个消息
我们新创建一个功能包:
catkin_create_pkg top roscpp std_msgs message_generation message_runtime
再看看ROS Wiki上的原话:
接下来,还有关键的一步:我们要确保msg文件被转换成为C++,Python和其他语言的源代码:
查看package.xml, 确保它包含一下两条语句:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
如果没有,添加进去。 注意,在构建的时候,我们只需要"message_generation"。然而,在运行的时候,我们只需要"message_runtime"。
 哦,我的老天,在创建包的时候,它已经为我们创建好了。
哦,我的老天,在创建包的时候,它已经为我们创建好了。
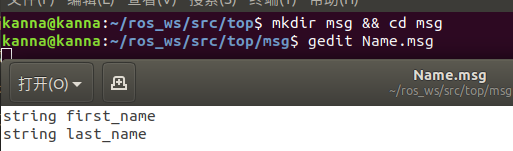
然后就是创建我们的消息:
然后我们修改CMakeList.txt,确保以下命令我们是修改了的:
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
取消注释并修改:
add_message_files(
FILES
Name.msg
)
generate_messages(
DEPENDENCIES
std_msgs
)
确保find_package里只有message_generation, 而没有message_runtime,否则会报错。
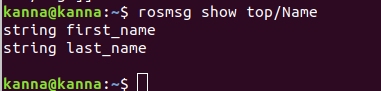
编译后我们查看一下,成功:
二.编写一组发送接收节点
先不说代码具体是啥意思,后面会一起讲解
1.发送节点
在top/src里编写写入puber.cpp:
#include "ros/ros.h"
#include "top/Name.h"
#include "sstream"
int main(int argc, char **argv)
{
std::stringstream ss;
top::Name msg;
ros::init(argc, argv, "publisher");
ros::NodeHandle h;
ros::Publisher puber = h.advertise<top::Name>("Name_Info", 10);
ros::Rate loop_rate(1);
ss << "A B";
while (ros::ok())
{
ss >> msg.first_name;
ss >> msg.last_name;
ROS_INFO("I Send [%s %s]", msg.first_name.c_str(), msg.last_name.c_str());
puber.publish(msg);
}
return 0;
}
2.接收节点
写入suber.cpp
#include "ros/ros.h"
#include "top/Name.h"
void infoCallback(const top::Name::ConstPtr& msg)
{
ROS_INFO("Name Changed [%s %s]", msg->last_name.c_str(), msg->first_name.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "suber");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("Name_Info", 1000, infoCallback);
ros::spin();
return 0;
}
3.修改CMakeList.txt
除了创建消息的时候,我们修改了CMakeList中关于话题使用的消息的配置,现在是节点配置,加入:
add_executable(puber src/puber.cpp)
target_link_libraries(puber ${catkin_LIBRARIES})
add_executable(suber src/suber.cpp)
target_link_libraries(suber ${catkin_LIBRARIES})
4.编译运行
roscore
rosrun top puber
rosrun top suber
rqt_graph

Nice!搞定!
