7.The VC Dimension
前几节着重介绍了机器能够学习的条件并做了详细的推导和解释。机器能够学习必须满足两个条件:
- 假设空间H的Size M是有限的,即当N足够大的时候,那么对于假设空间中任意一个假设g, 。
- 利用算法A从假设空间H中,挑选一个g,使 ,则 。
这两个条件,正好对应test和trian两个过程。train 的目的是使损失期望 ;test 的目的是使将算法用到新的样本时的损失期望也尽可能小, 。
正因为如此,上次课引入了 break point,并推导出只要 break point 存在,则M有上界,一定存在 。
本文主要介绍VC Dimension的概念。同时总结VC Dimension与 , ,模型复杂度的关系。
7.1 Definition of VC Dimension
如果一个假设空间
有break point k,那么它的成长函数是有界的,它
的上界称为Bound function。由数学归纳法知,Bound function也是有界的,且上界为
。从下面的表格可以看出,
比
松弛很多。

则根据上一节课的推导,VC bound就可以转换为:

这样,不等式就只与k和N相关,一般情况下样本N足够大,所以只考虑k值。有如下结论:
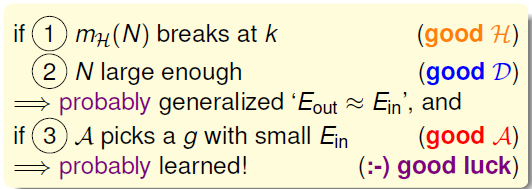
-
若假设空间H有break point k,且N足够大,则根据VC bound理论,算法有良好
的泛化能力; -
在假设空间中选择一个矩g,使 ,则其在全集数据中的错误率会较低。
VC Dimension:某假设集H能够shatter的最多inputs的个数,即最大完全正确的分类能力。(注意,只要存在一种分布的inputs能够正确分类也满足)。
shatter :英文意思是“粉碎”,即对于inputs的所有情况都能列举出来。例如对N个输入,如果能够将 种情况都列出来,则称该N个输入能够被假设集H shatter。
break point:假设空间(假设集)H 不能被shatter任何分布类型的inputs的最少个数,亦即不能满足完全分类情形的样本数量。完全二分类(shattered)是可分出
种二分类(dichotomy)的情形。则VC Dimension等于break point的个数
减一。

回顾一下之前介绍的4种例子,它们对应的VC Dimension是多少:

用
代替
,VC bound的问题就转换为与
和 N 相关了。同时,如果一个假设空间H的
确定了,则就能满足机器能够学习的第一个条件,与算法、样本数据分布和目标函数都没有关系。

7.2 VC Dimension of Perceptrons
回顾2D PLA算法,已知Perceptron的k=4,即 。以下两个条件保证了2维线性可分的数据是可以学习的。
-
线性可分的数据通过PLA算法运行足够长的时间(T步骤足够大),则会找出一条可以正确分类的直线,使得样本中没有产生分错类的情况,即 ;
-
在训练样本和整个数据集都服从同一分布P的前提下,有VC限制,保证了在 训练样本N足够大时, 。
以上两个条件共同得出:如果找到一个g,使 ,那么就能证明PLA是可以学习的。

如果是多维的Perceptron,它对应的 又等于多少呢?已知在1D Perceptron, ,在2D Perceptron, ,那么有如下假设: ,其中d为维数。
要证明的话,只需分两步证明:

首先证明第一个不等式: 。
在
维里,只要找到某一类的
个输入(inputs)可以被 shatter ,那么必然可证上式成立。所以,有意构造一个
维的矩阵
能够被 shatter 即可。不妨构造一个输入样本集,假设样本为一个行向量,其中第一个样本为0向量,第二个样本是其第一个分量为1其他分量为0的向量,第三个样本是其第二个分量为1其他分量为0的向量,以此类推,第d+1个样本是其第d个分量为1其他分量为0的向量,如:
,
,
,…,
,
是
维的,有
个输入,每个输入加上第0个维度的分量,其值为1(阈值
变为
所乘的样本分量),得到的
矩阵为:

矩阵中,每一行代表一个inputs,每个inputs是 维的,共有 个inputs。这里构造的很明显是可逆的(从第 2 行到第 行,每一行都减去第一行得到一个对角矩阵,满秩,所以可逆)。
需要证明的是可以完全二分,关注的重点为输出标记向量 。只要找出各种权值向量 能将上述输入样本集X映射到全部的二分情况下的 上就可以了。
已知感知器可以使用
表示。而只要权值向量使得 $X \cdot w = y $ 成立,就一定满足
的需求。假设其中输入矩阵如上图中公式所示,即
是可逆矩阵,输出向量
的任意一种 二分类情况都可以被一个假设函数
划分出(
维的所有输入都能被shatter。shatter的本质是假设空间H对的所有情况的判断都是对的,即总能找到权重
,满足
。),原因是权重向量
满足
,即任何一种二分类情况都会有一个权重向量
与之对应,因此满足
成立,也就证明了第一个不等式。

然后证明第二个不等式:
。思路:证明该式不能如上,因为其要证明在所有的情况下,证明过程稍复杂,先以一个2维空间的例子为切入点。
假设一个2维空间,则需要观察在2+2个输入数据量,不妨假设这四个输入样本分别是: 。输入数据集 如下式所示。
可以想象在标记
,
时,
不能为-1,如图所示。
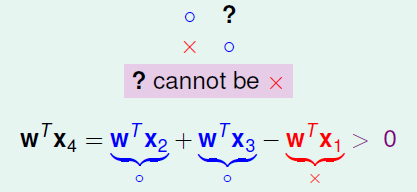
用数学的形式如何表达?首先根据这四个样本可以确保
成立。该式等号两边同时左乘权值向量
可得上图中式所示,这种样本间线性依赖(linear dependence)的关系导致了无法二分。
在d维里,如果对于任何的d+2个inputs,一定不能被shatter,则不等式成立。
构造一个任意的矩阵,其包含 个inputs,该矩阵有 列, 行。这 个向量的某一列一定可以被另外 个向量线性表示,例如对于向量 ,可表示为:
。其中,假设 $a_1 > 0,a_2, \cdots, a_d <0 X_2, \cdots, X_d$ 均为负类,则存在 ,得到如下表达式:
因为其中第一项大于0,代表正类;剩余项小于0,代表负类。所有对于这种情况,一定是正类(因为
和
的第
个分量同号,
)。因此在任何d+2个输入数据集中必然都存在不能满足的二分类( 个inputs无法被shatter),即刻证得:
。

7.3 Physical Intuition VC Dimension

上一节内容将感知器中数据的维度与VC维联系到了一起,也明白了VC Dimension中的 Dimension 的含义。而在感知器中,数据样本的维度又与权值向量的维度一致,不同的权值向量对应着不同的假设函数,因此称假设函数的参数 $ w^T = [w_0,w_1,…,w_d]$是假设空间上的自由度(degree of freedom)。自由度是可以任意调节的,如同上图中的旋钮一样,可以调节。如果从假设空间的数量M = |H|角度上描述,则自由度是无限大的;但是从感知器在二元分类上这一限制条件入手,则可以使用VC维作为自由度的衡量。VC Dimension代表了假设空间的分类能力,即反映了H的自由度,产生dichotomy的数量,也就等于features的个数,但也不是绝对的。

上图中Positive Rays 的例子中,VC Dimension 时,假设空间有1个参数,即阈值;Positive Intervals 的例子中,VC Dimension 时,假设空间有2个参数,即左右边界点。因此在大部分情况下,VC Dimension 大致 假设空间参数的个数。
例如,对2D Perceptrons,线性分类,
,则
,亦即只要3个features就可以进行学习,自由度为3。M与
是成正比的,从而得到如下结论:

| 很小的时候 | 很大的时候 | |
|---|---|---|
| 第一个条件 ① | 满足, 时,不好情况出现的几率变小了 | 不满足, 时,不好情况出现的几率变大了 |
| 第二个条件 ② | 不满足,在 变小时,假设的数量变小,算法的选择变小,可能无法找到 的假设 | 满足,在 变大时,假设的数量变大,算法的选择变大,找到 的假设 |
在一些书中,参数较多的模型都称为复杂模型,很少给出解释,这一节的内容给出了很好的解释,因为在很多情况下模型参数的个数大致等于VC维的个数。参数越多或者说模型越复杂,越有可能找出使 最小的假设函数g,但是这需要大量训练样本的支持,因为只有在训练样本数量N足够大时,才能使更复杂(即参数更多或者说VC维更大)的模型出现不好情况的几率变小,如上表的右列。
7.4 Interpreting VC Dimension
进一步探讨 VC Dimension的意义。VC Bound:
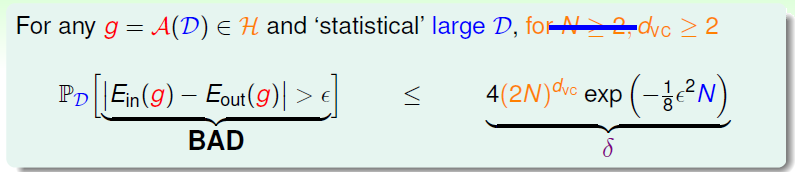
根据之前的泛化不等式,如果
,即出现 BAD 情况的概率最大不超过
。反过来,归于GOOD情况发生的概率最小为
,则对上述不等式进行重新推导:

表现了假设空间H的泛化能力,
越小,泛化能力越大。

至此,已经推导出泛化误差
的边界,因为我们更关心其上界(
可能的最大值),即:

上述不等式的右边第二项称为模型复杂度(model complexity),其模型复杂度与样本数量N、假设空间H(
)、
有关。
由
共同决定。
、模型复杂度、
随
变化的关系如上图所示。由上图可知:
- 越大, 越小, 越大(复杂)。
- 越小, 越大, 越小(简单)。
- 随着 增大, 会先减小再增大。
所以,为了得到最小的 ,不能一味地增大 以减小 ,因为 太小的时候,模型复杂度会增加,造成 变大。也就是说,选择合适的 ,选择的features个数要合适。
VC维除了表示模型复杂度之外还可以表示样本复杂度(Sample Complexity):
如果选定
,样本数据D选择多少合适呢?通过下面一个例子可以帮助我们理解:

通过计算得到N=29300,刚好满足 的条件。N大约是 的10000倍。这个数值太大了,实际中往往不需要这么多的样本数量,大概只需要 的10倍就够了。N的理论值之所以这么大是因为VC Bound 是非常宽松的约束,得到的是一个比实际大得多的上界。宽松约束的四个主要原因:
- 霍夫丁不需要知道未知的 ,VC限制可以用于各种分布,各种目标函数;
- 成长函数 取代真正的二分类个数本身就是一个宽松的上界,VC限制可以用于各种数据样本;
- 使用二项式 作为成长函数的上界使得约束更加宽松,VC限制可以用于任意具有相同VC维的 假设空间;
- 联合限制(union bound)并不是一定会选择出现不好事情的假设函数,VC限制可以用于任意算法。

值得一提的是,VC Bound是比较宽松的,而如何收紧它却不是那么容易,这也是机器学习的一大难题。但是,令人欣慰的一点是,VC Bound基本上对所有模型的宽松程度是基本一致的,所以,不同模型之间还是可以横向比较。从而,VC Bound宽松对机器学习的可行性还是没有太大影响。
summary
本节课主要介绍了VC Dimension的概念就是最大的nonbreak point。然后,得到了Perceptrons在d维度下的VC Dimension是 。接着,在物理意义上,将 与自由度联系起来。最终得出结论 不能过大也不能过小。选取合适的值,才能让 足够小,使假设空间H具有良好的泛化能力。
参考:
https://www.cnblogs.com/ymingjingr/p/4300092.html
https://github.com/RedstoneWill/HsuanTienLin_MachineLearning
