ROS2入門チュートリアル-windows設置ROS2
ROS2入門チュートリアル-windows設置ROS2
説明:
- これは、Windowsシステムの下でインストールする方法について説明しますROS2
システム要件
- 推奨される10システムを獲得
宅内設置ROS2準備
-
1.チョコレートをインストールします。
-
:のリンクChocolateyをダウンロードHTTPS://chocolatey.org/
-
2. ChocolateyでのPythonをインストールします。
-
コマンドプロンプトを開き、次のコマンドを入力します。
choco install -y python
-
3. OpenSSLをインストールします。
-
OpenSSLのインストーラをダウンロードするには、以下の提供されたリンクから。ダウンロードまたはライトWin32バージョンはありません、Win64のはOpenSSL v1.0.2デベロッパーをダウンロードしてください。
-
OpenSSLのリンク:HTTPS://slproweb.com/products/Win32OpenSSL.html
-
デフォルトのパラメータでインストーラを実行します。次に、環境変数を(次のコマンドは、デフォルトのインストールディレクトリを前提として)定義します。
setx -m OPENSSL_CONF C:\OpenSSL-Win64\bin\openssl.cfg
#Add C:\OpenSSL-Win64\bin\ to your PATH
-
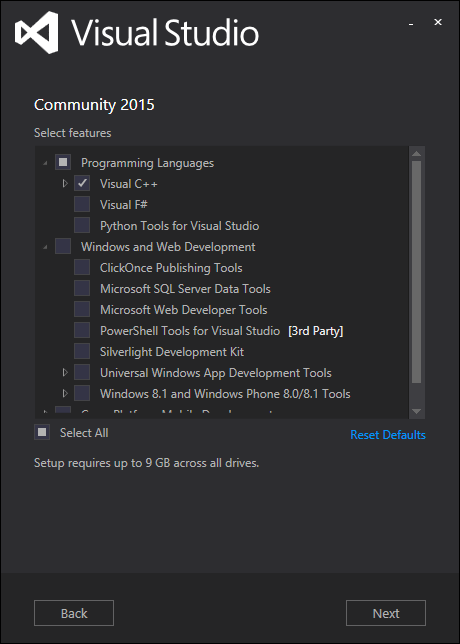
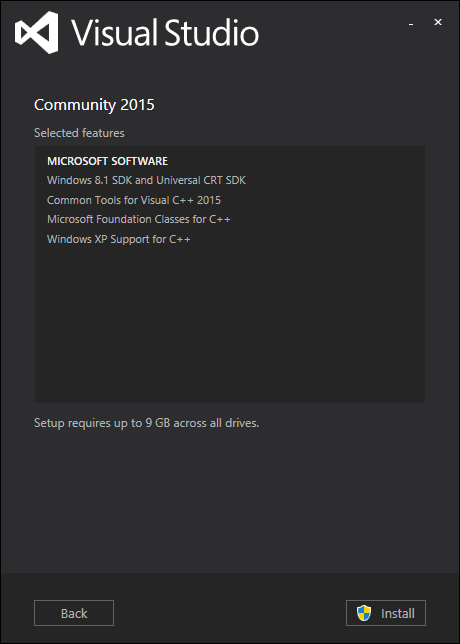
4. Visual Studioのコミュニティ2015のインストール
-
Visual Studioのコミュニティダウンロードリンク2015:HTTPS://www.visualstudio.com/vs/older-downloads/
-
所望の機能をインストールしてください。
-
5. DDSサプライヤーをインストールします。
-
バイナリパッケージは、ミドルウェアとしてeProsima FastRTPSとADLINK OpenSpliceを一緒になります。異なるDDSvendorを使用するには、から必要となるソースの建物を開始します。
-
eProsima FastRTPS&ブースト(唯一のベータ1のために以前)
-
Adlink OpenSplice
-
如果想要使用OpenSplice,你需要下载最新版本(最低要求版本为6.7.170912)
-
OpenSplice的相关下载链接:https://github.com/ADLINK-IST/opensplice/releases/tag/OSPL_V6_7_171127OSS_RELEASE
-
-
6.安装OpenCV
-
OpenCV的相关下载链接:https://github.com/ros2/ros2/releases/download/release-beta2/opencv-2.4.13.2-vc14.VS2015.zip
-
PATH环境变量设置:
c:\dev\opencv-2.4.13.2-vc14.VS2015\x64\vc14\bin
-
7.安装依赖项
-
请从这个GitHub存储库下载这些软件包。
-
asio.1.10.6.nupkg
-
本征3.3.3.nupkg
-
TinyXML的-usestl.2.6.2.nupkg
-
tinyxml2.4.1.0.nupkg
-
-
下载完成后,执行以下命令:
choco install -y -s <PATH\TO\DOWNLOADS\> asio eigen tinyxml-usestl tinyxml2
# <PATH\TO\DOWNLOADS>为已下载软件包的文件夹的对应路径
- 您还必须安装
pip一个python包,yaml:
python -m pip install -U pyyaml setuptools
下载ROS2
-
:のリンクROS2ダウンロードHTTPS://github.com/ros2/ros2/releasesは、
-
例えば、Windows用の最新のソフトウェアパッケージをダウンロードしてください
ros2-package-windows-AMD64.zip。- 注意:バイナリオプションは、別のファイル名につながる可能性があり、複数のダウンロードがあるかもしれません。
-
(私たちが想定したzipファイルを解凍します
C:\dev\ros2)。
ROS2環境を設定します。
- ワークスペースを設定するには、次のコマンドとソースRO2・コンフィギュレーション・ファイルを実行
call C:\dev\ros2\local_setup.bat
- あなたはOpenSpliceサポートのバージョンをダウンロードし、ミドルウェアとしてそれを使用したいと考えている場合は、追加のOpenSpliceインストールファイルを取得する必要があります。唯一の方法
afterあなたはROS 2を取得することができます:
call "C:\opensplice67\HDE\x86_64.win64\release.bat"
いくつかの例を試してみてください
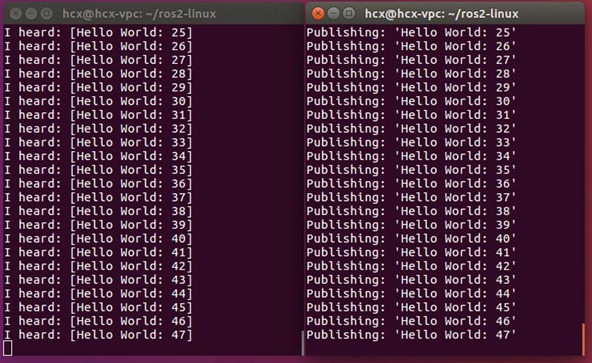
- ターミナルを開き、次のコマンドを実行します。
ros2 run demo_nodes_cpp talker
- 新しいターミナルを開き、次のコマンドを実行します。
ros2 run demo_nodes_py listener
- 図の業績は次のとおりです。
トラブルシューティング
-
あなたが例を実行することはできませんとDLLエラーの不足が発生した場合、ライブラリの前面にあるすべての外部依存関係は、のような、インストールを確認してください:OpenCVの
PATH環境変数が正しく設定されています -
あなたが以前の設定時に行うことを忘れてしまった場合は
call C:\dev\ros2\local_setup.bat、コマンドを、あなたがデモを実行することができないかもしれません
参考リンク