1. 動的システムのコンピュータシミュレーション
システム
特定の機能、相互関係、相互作用を持つ要素の集合を指します。
システムモデル
システム モデルは、実際のシステムを抽象化し、システムの本質 (または特性) を記述したものです。
モデルは物理モデルと数学モデル に分類できます。
シミュレーション
類似性理論、サイバネティクス、情報技術および関連分野の関連知識 に基づいて、コンピュータやさまざまな特殊な物理機器をツールとして使用し、システムモデルの助けを借りて実際のシステムをテストするための包括的な技術です。
シミュレーションの分類
物理シミュレーション(物理シミュレーション)、数学シミュレーション、半物理シミュレーション。
コンピュータシミュレーション
コンピュータシミュレーションは、プログラムのデモンストレーション、技術指標の決定、設計分析、障害対応などのさまざまな段階 を含む、製品開発または設計システムの全プロセスで使用できます。
2. シミュレーションの3要素
コンピュータ シミュレーションの 3 つの基本要素は、システム、モデル、コンピュータです。
これらに関連する 3 つの基本的なアクティビティは、モデル構築、シミュレーション モデル構築 (二次モデリングとも呼ばれます)、およびシミュレーション テストです。
3. Simulink、モデリング、シミュレーション
Simulink
Simulink は、コンピューター シミュレーション用のソフトウェア ツールです。これは、さまざまな動的システム (連続、離散、ハイブリッド) のモデリング、解析、シミュレーションを可能にする Matlab のアドオンです。
Simulinkの応用分野
①通信・衛星システム ②航空宇宙システム ③船舶システム ④金融システム ⑤生物システム ⑥自動車システム 等
4. 簡単なモデルを作成する
例

ステップ
① Matlab を開き、コマンド ウィンドウに Simulink と入力するか、ファイル パスの上にある SimulinkアイコンSimulink シミュレーションを開始します。
②新しい空のモデルを作成し、シミュレーション ページの下のライブラリ ブラウザをクリックして、必要なモジュールをドラッグ アンド ドロップします。
③ モジュールをダブルクリックしてモジュールのパラメータを設定し、接続します。
④ クリックして実行し、オシロスコープ (スコープ) をダブルクリックしてシミュレーション結果を表示します。
モデルと結果は次のとおりです
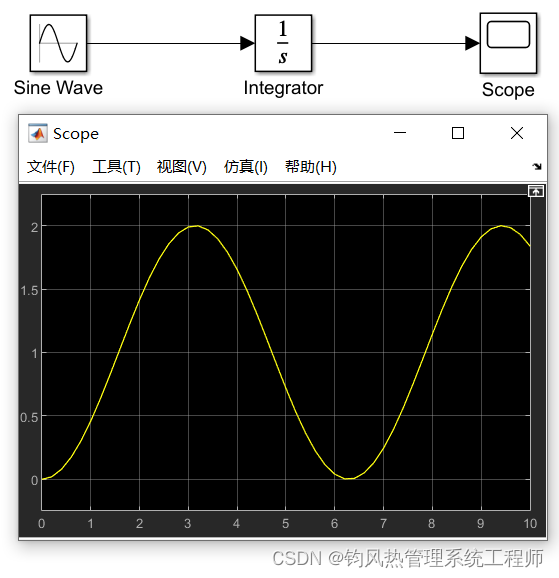
5. モデルの基本構造
これは、信号源モジュール、シミュレートされたシステム モジュール、および出力表示モジュール の 3 つの部分で構成されます。
信号源: システムの入力として、通常、定信号源、関数発生器、およびユーザー定義信号が含まれます。
システム モジュール: 中央モジュールは、 Simulink シミュレーション モデリングによって解決される主な問題です。
出力表示: 主にグラフィック表示、オシロスコープ表示、ファイルまたは Matlab ワークスペース (ワークスペース) への出力が含まれます。
記事のソース: Simulink クイック スタート コースウェア (1)