ubuntu20.04にIAI Kinect2をインストール
このライブラリをインストールする前に、まず Kinect2 ドライバーをインストールしてください。チュートリアルを参照してください。
ウェアハウスのReadmeに従ってインストールします
ubuntu20.04で次のコマンドに従ってインストールすると、多くのエラーが報告されます
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
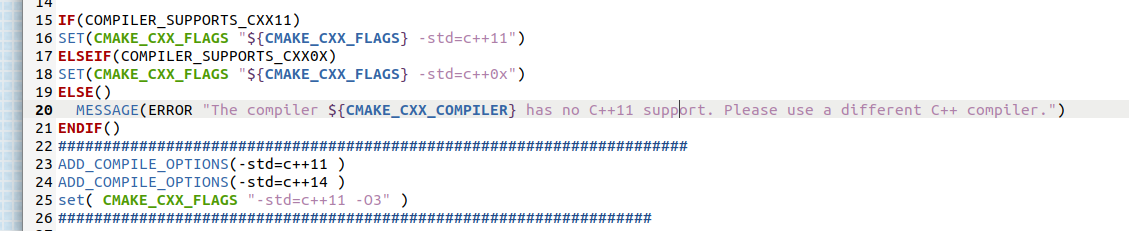
错误1:error: #error PCL requires C++14 or above
以下の対応するパッケージの Cmakelist.txt に追加します。
ADD_COMPILE_OPTIONS(-std=c++11 )
ADD_COMPILE_OPTIONS(-std=c++14 )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
例えば:
错误2:error: CV_IMWRITE_JPEG_QUALITY was not declared in this scope
CV_xxx がエラー レポートを見つけることができません。
コンソールのエラー レポートで対応するエラー レポート ファイルを見つけ、Crtl+F を使用して、まず対応するエラー ステートメントを見つけます。
CV_xxx 修改为cv::xxx,例如CV_IMWRITE_JPEG_QUALITY修改为 cv::IMWRITE_JPEG_QUALITY 小写的cv
错误3:其中CV_BGR2GRAY 报错时,如果上面方法无效,先恢复原来的CV_XXX形式, error: CV_BGR2GRAY was not declared in this scope
コンソールのエラー レポートから対応するエラー ファイルを見つけて、ヘッダー ファイルを追加します。
#include <opencv2/imgproc/types_c.h>
错误4:其中CV_AA 报错时,如果上面方法无效,先恢复原来的CV_XXX形式, error: CV_AA was not declared in this scope
コンソールのエラー レポートから対応するエラー ファイルを見つけて、ヘッダー ファイルを追加します。
#include<opencv2/imgproc/imgproc_c.h>
トラブルシューティングを行った後、コンパイルに合格できます。
使い方
コマンドをコンパイルして実行すると、コマンドroslaunch kinect2_bridge kinect2_bridge.launchが見つからないというメッセージが表示されます。この時点では、コマンドを取得する必要があります。
cd ~/catkin_ws
source devel/setup.bash
roslaunch kinect2_bridge kinect2_bridge.launch
これで正常に実行できるようになりました (正常に実行できなかった場合は、新しいウィンドウを開いてroscore試してください)。これは単なるブリッジであり、次のコマンドを使用してカメラ画面を確認する必要があります。
rosrun kinect2_viewer kinect2_viewer kinect2 sd cloud
後で、Python を通じてカメラによって公開されたトピックをサブスクライブして、カメラの情報を受け取ることができます