Autoware.ai1.14.0 conducción automática: ejecución de demostración
preparación de datos
Descargar datos:
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gz
Asegúrese de tener en cuenta que el archivo descomprimido está en la ruta .autoware/. De lo contrario, cuando ejecute el archivo de inicio, se le indicará que no se puede encontrar el archivo: .autoware/data/tf/tf.launch.
Modifique el script de ejecución y cámbielo a la ruta de origen correcta
cd ~/autoware-1.14/install/runtime_manager/share/runtime_manager/scripts
gedit run
Modifique el siguiente contenido:
${OPTION_COMMAND}="bash -c 'source ~/autoware-1.14/install/setup.bash;
Para evitar advertencias, busque 'state_publisher' y reemplácelo con 'robot_state_publisher'.
文件位置:autoware-1.14>instalar>vehicle_description>share>vehicle_description>launch>vehicle_model.launch
Después de abrir, modifique el archivo: cambie 'state_publisher' a 'robot_state_publisher'
iniciar el software automático
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
Configurar demostración
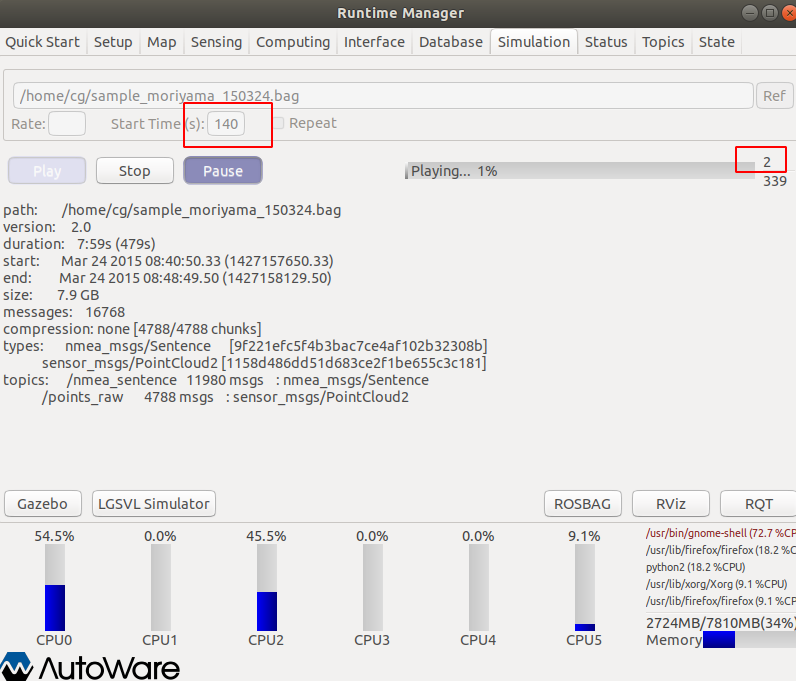
1 Seleccione la pestaña "Simulación" en el Administrador de tiempo de ejecución, seleccione el archivo rosbag extraído de "sample_moriyama_data.tar.gz" en el cuadro de selección de archivos a continuación, establezca el tiempo de inicio en 140 s y haga clic en el botón "Reproducir" a continuación para comenzar. Reproduzca el proceso de conducción autónoma registrado en la demostración, pero aquí debemos hacer clic en "Pausar" después de 2 segundos , como se muestra en la figura, porque también necesitamos configurar algunos otros datos y parámetros.
2. Configure el TF y el modelo de vehículo en la pestaña "Configuración", es decir, haga clic en el botón "TF" y en el botón "Modelo de vehículo". Después de hacer clic correctamente, los dos botones deberían estar en un estado oscuro.
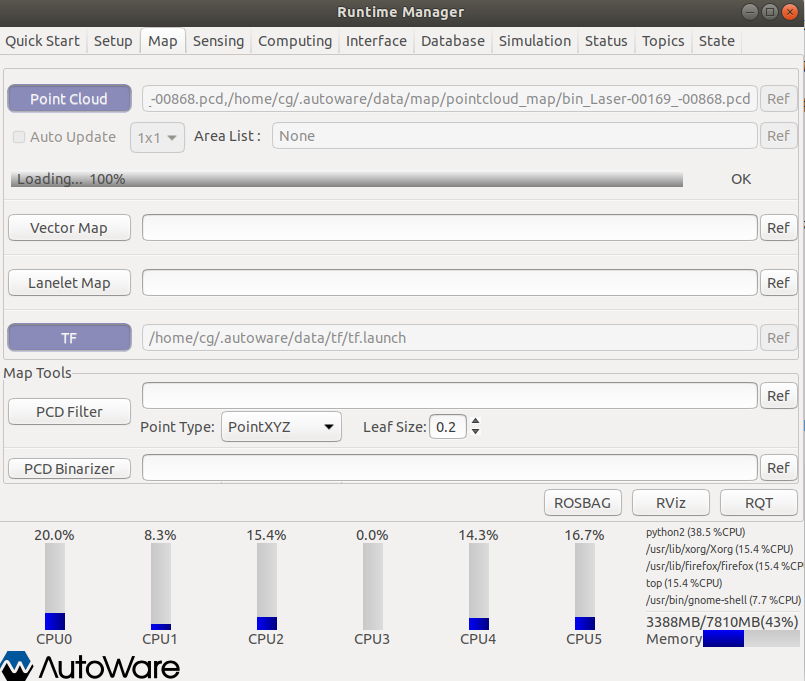
 3. Seleccione el archivo de mapa y el archivo de configuración de TF en la pestaña "Mapa". Cargue el archivo de mapa de nube de puntos en el cuadro de selección de archivos detrás de "Nube de puntos". Los archivos relevantes se almacenan en los archivos extraídos del archivo "sample_moriyama_data.tar.gz". La ubicación específica es "data/map/pointcloud_map". Requerido Seleccione todos los archivos en la carpeta. Luego haga clic en el botón "Nube de puntos" para cambiarlo al estado oscuro que se muestra en la imagen a continuación. Cargue el archivo tf.launch en el cuadro de selección de archivos detrás del botón "TF". Elegí autoware-1.14/src/autoware/documentation/autoware_quickstart_examples/launch y seleccioné el archivo tf_local.launch. Luego haga clic en el botón "TF" para cambiarlo al estado oscuro como se muestra en la imagen a continuación.
3. Seleccione el archivo de mapa y el archivo de configuración de TF en la pestaña "Mapa". Cargue el archivo de mapa de nube de puntos en el cuadro de selección de archivos detrás de "Nube de puntos". Los archivos relevantes se almacenan en los archivos extraídos del archivo "sample_moriyama_data.tar.gz". La ubicación específica es "data/map/pointcloud_map". Requerido Seleccione todos los archivos en la carpeta. Luego haga clic en el botón "Nube de puntos" para cambiarlo al estado oscuro que se muestra en la imagen a continuación. Cargue el archivo tf.launch en el cuadro de selección de archivos detrás del botón "TF". Elegí autoware-1.14/src/autoware/documentation/autoware_quickstart_examples/launch y seleccioné el archivo tf_local.launch. Luego haga clic en el botón "TF" para cambiarlo al estado oscuro como se muestra en la imagen a continuación.
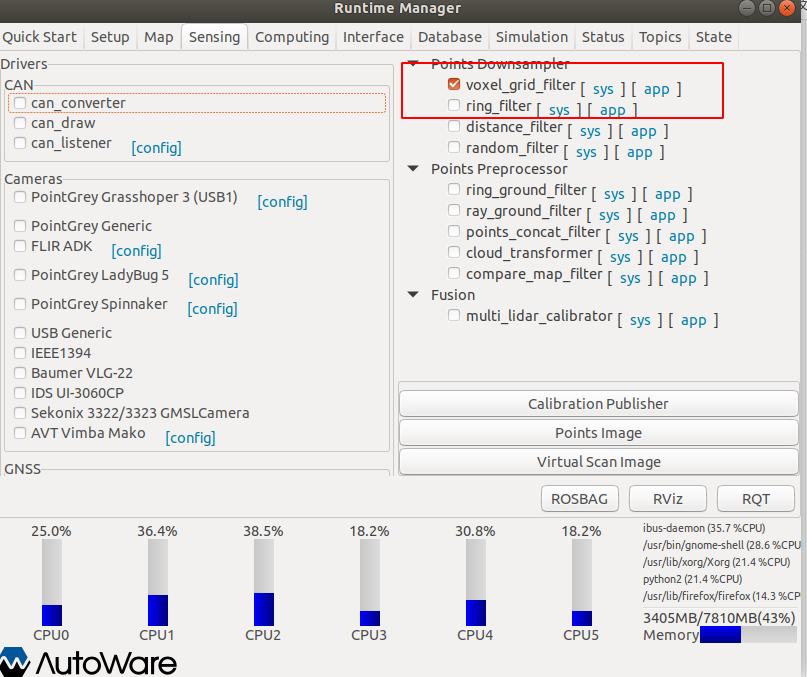
 4. Marque "voxel_grid_filter" en la pestaña "Detección", como se muestra en la siguiente figura.
4. Marque "voxel_grid_filter" en la pestaña "Detección", como se muestra en la siguiente figura.
5. Marque "nmea2tfpose" y "ndt_matching" en la pestaña "Computación", como se muestra en la siguiente figura.
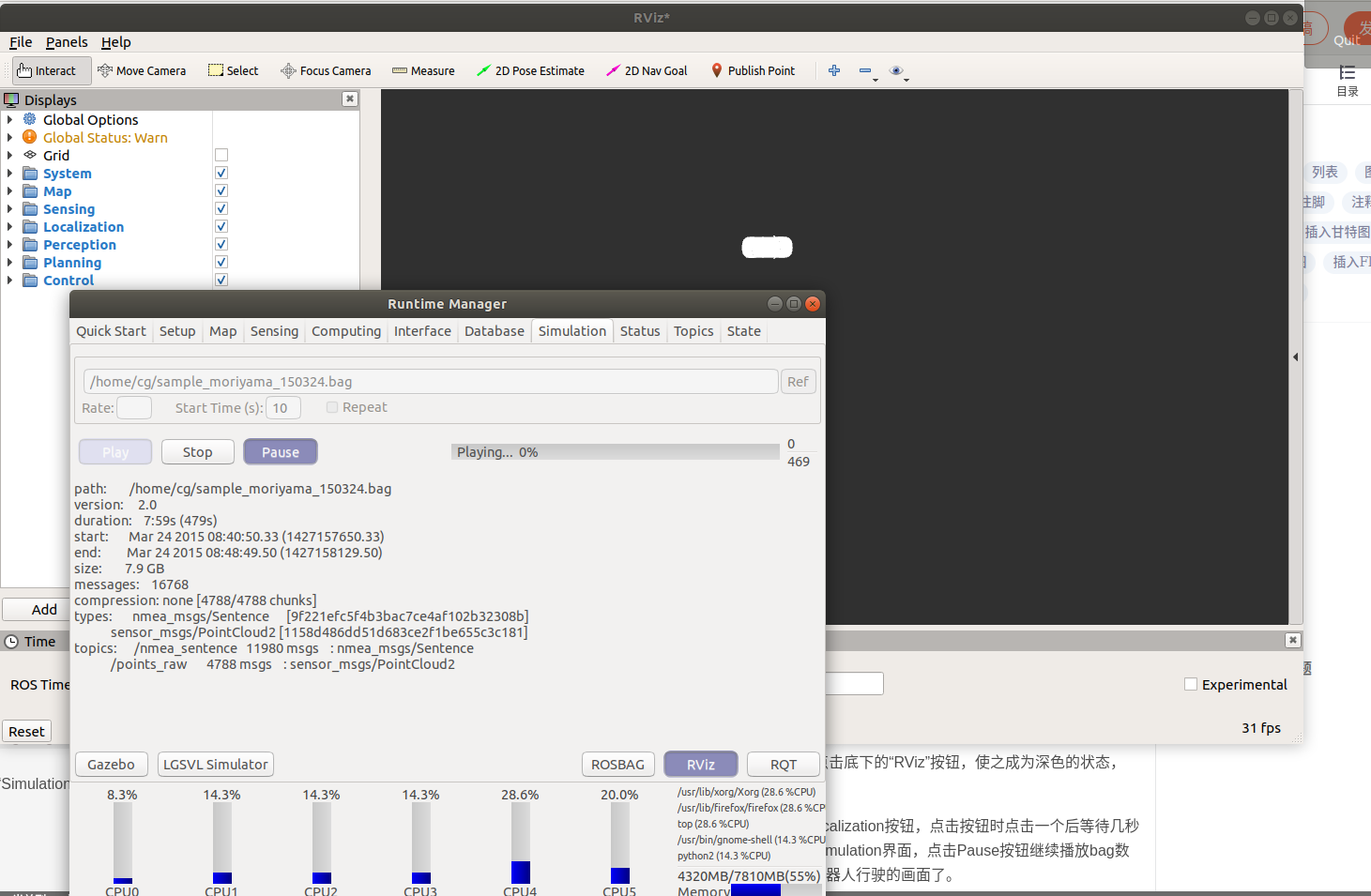
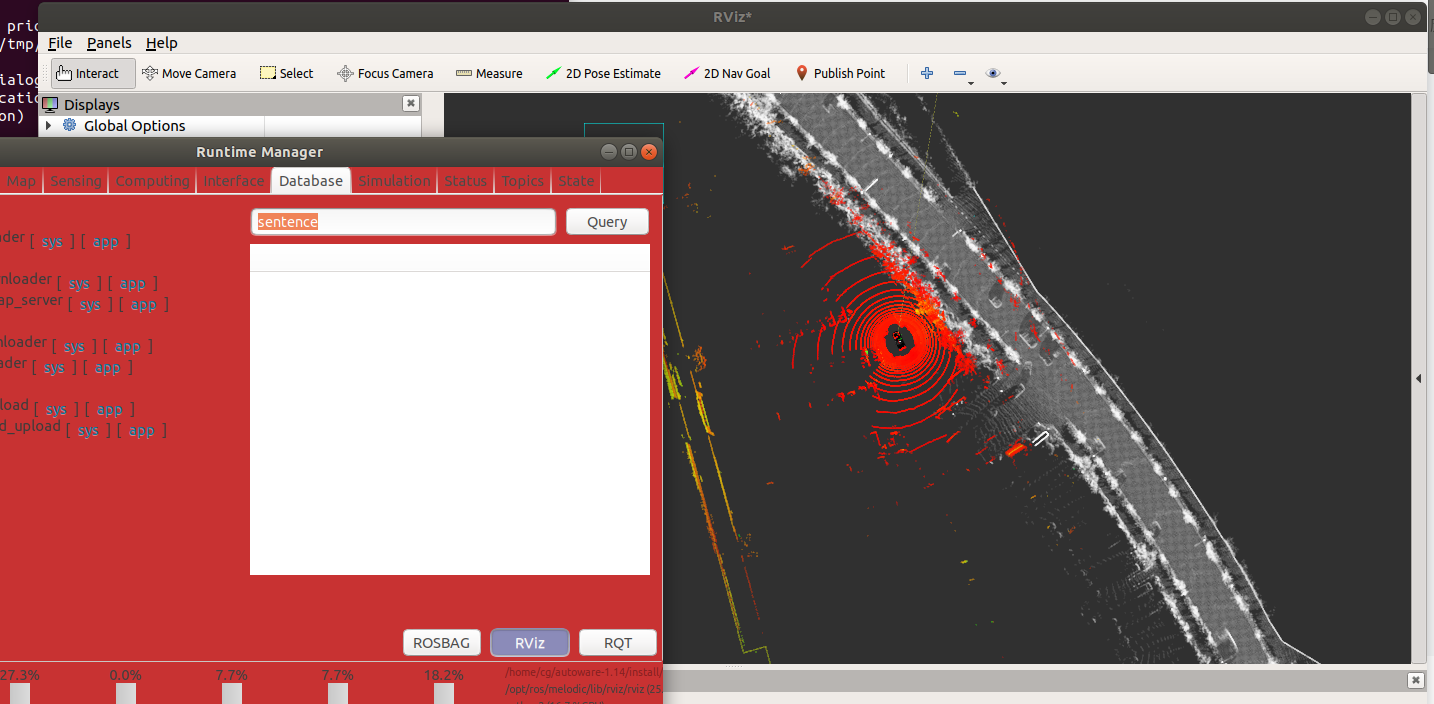
 6. Abra la herramienta de visualización RViz, regrese a la pestaña "Simulación" y haga clic en el botón "RViz" en la parte inferior para oscurecerlo, como se muestra en la siguiente figura.
6. Abra la herramienta de visualización RViz, regrese a la pestaña "Simulación" y haga clic en el botón "RViz" en la parte inferior para oscurecerlo, como se muestra en la siguiente figura.
 7. Para configurar RViz, primero seleccione el archivo de configuración de RViz, seleccione "Archivo–>Abrir configuración" en el menú y seleccione el archivo "default.rviz" en "autowar-1.14/src/autoware/documentation/autoware_quickstart_examples/launch /rosbag_demo/" .
7. Para configurar RViz, primero seleccione el archivo de configuración de RViz, seleccione "Archivo–>Abrir configuración" en el menú y seleccione el archivo "default.rviz" en "autowar-1.14/src/autoware/documentation/autoware_quickstart_examples/launch /rosbag_demo/" .
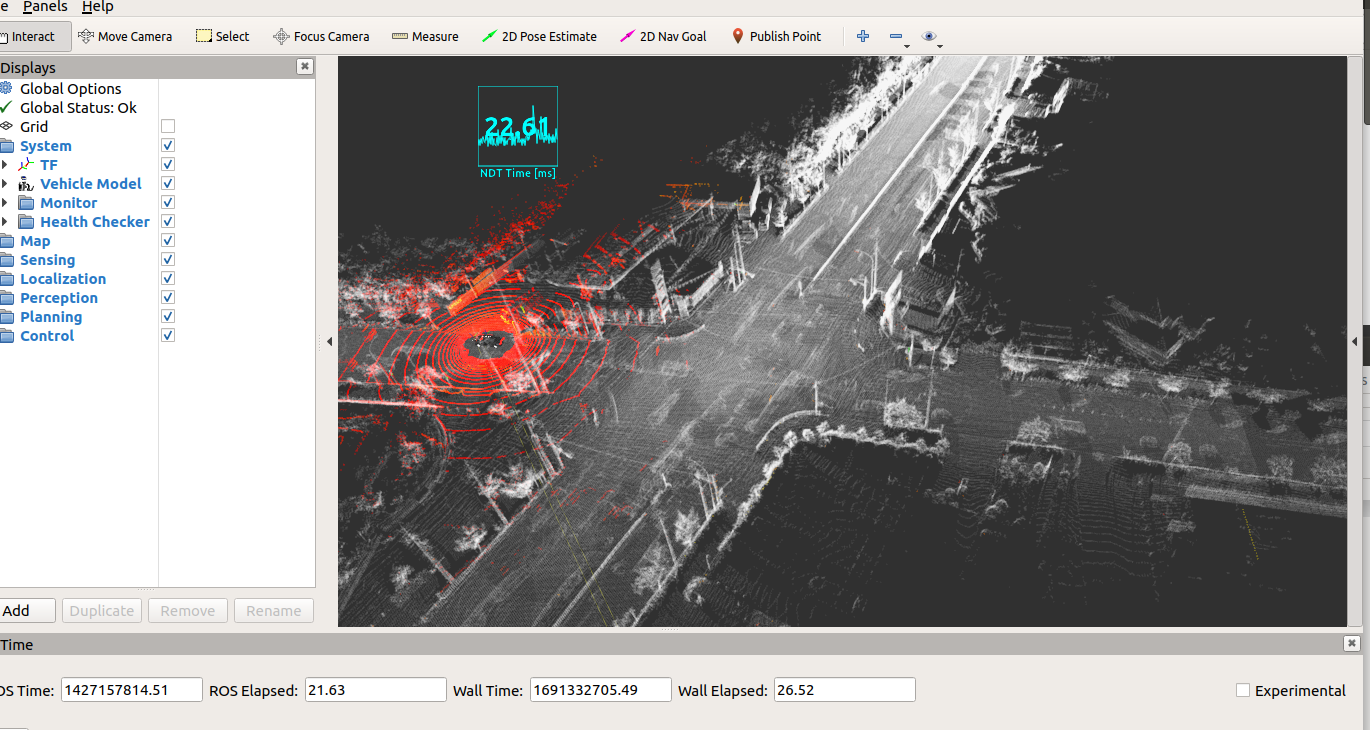
8. Regrese al Administrador de tiempo de ejecución, ingrese a la pestaña "Simulación" y haga clic en el botón "Pausar". En este momento, la demostración finalizará el estado de pausa y continuará reproduciendo el archivo rosbag. Después de un tiempo, podrá ver el mapa de la nube de puntos y la escena de conducción del robot en Rviz.
error:
coche a la deriva.
Solución exitosa:
cambie tf.launch en sample_moriyama_data a tf_local.launch que viene con autoware. Y establezca la Hora de inicio en 140 (en realidad, no importa mucho), deje que los datos se ejecuten por un tiempo y se estabilicen.
Para obtener más información, puede aprender y consultar:
Tutorial de introducción a Autoware1.14