Directorio de artículos
En primer lugar, debe comprender que el módulo de Planificación se basa en los niveles de Escenario, Etapa y Tarea, a saber: Escenario -> Paso -> Método de toma de decisiones específico. Apollo puede hacer frente a diferentes escenarios viales a los que se enfrenta la conducción autónoma, todos los cuales se registran y gestionan a través de Scenario. El escenario utiliza una máquina de estados finitos para juzgar y seleccionar la escena de conducción actual. Hay varias etapas en cada escenario, que se refieren a los pasos aproximados que deben ejecutarse en la escena actual.
El módulo de planificación planifica una trayectoria para el vehículo autónomo en función de la información del entorno circundante percibida por la ruta (módulo de navegación), la predicción (módulo de percepción) y la información de navegación y posicionamiento del mapa (incluidas coordenadas, velocidad, aceleración, tirones, tiempo, etc.) y luego pasar esta información al módulo de control.
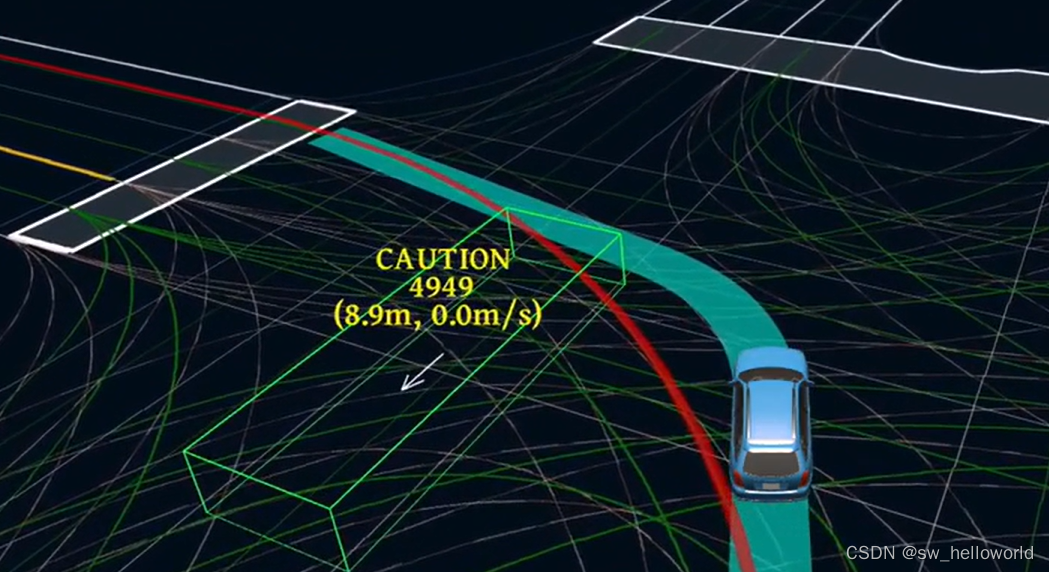
Si el vehículo gira a la izquierda en la intersección y la ruta de giro a la izquierda está ocupada, ¿cómo realizar el desvío hacia el obstáculo? Lo siguiente es sólo para referencia.
1. Códigos relacionados
Los códigos relevantes en esta parte se utilizan para atravesar obstáculos estáticos para actualizar el límite de la ruta, y los puntos de seguimiento de la ruta se calculan de acuerdo con el límite de la ruta, por lo que es necesario actualizar el límite de la ruta. Después de actualizar el límite, debido a que el obstáculo bloquea completamente el carril actual, el resultado es el límite izquierdo> límite derecho, en este momento path_block