El servosistema completo contiene muchos módulos, por lo que no se puede presentar en detalle uno por uno, por lo que este capítulo se centra en la introducción.
Diseñe la parte
FPGA más difícil
e introduzca brevemente
el flujo de trabajo del lado
ARM .
La parte FPGA incluye principalmente FOC
El algoritmo, el algoritmo de muestreo de corriente y el algoritmo de muestreo del codificador son la base de todo el sistema de control y determinan directamente el control del motor.
El efecto es bueno o malo. Debido a la particularidad del trabajo
de FPGA
, es necesario considerar la racionalidad del tiempo de diseño y coordinar racionalmente varios
El orden de ejecución de las tareas ha incrementado enormemente la dificultad de su diseño. Lo siguiente configurará
la parte importante del programa
FPGA.
Según la descripción del diseño, se divide principalmente en
módulo de algoritmo
SVPWM , módulo de retroalimentación del codificador y módulo de muestreo actual.
4.1
Programación del algoritmo SVPWM
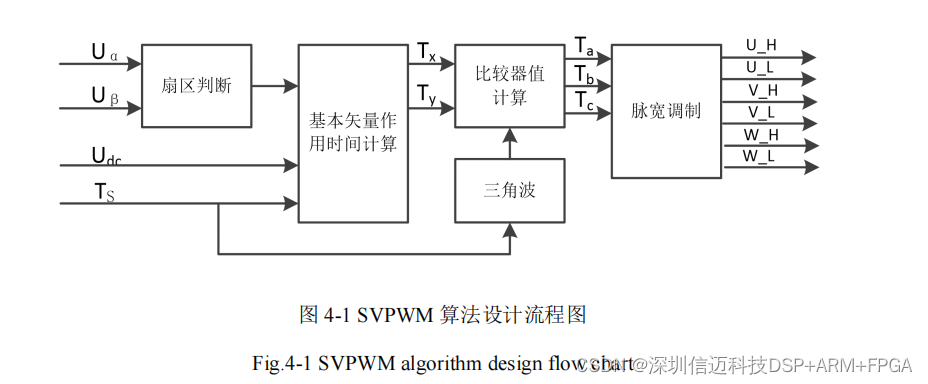
Según la cuarta sección del Capítulo 2,
el flujo de trabajo del algoritmo
SVPWM se muestra en la Figura
4-1 . Primero que nada la entrada.
Decodificando
y juzgando el sector actual, y luego calculando el tiempo de acción requerido para el vector básico del sector actual, el siguiente paso
es
En el momento del valor de comparación PWM
, finalmente realice la modulación de ancho de pulso y agregue el tiempo muerto para formar
un inversor de control de accionamiento de onda
PWM complementario.
El interruptor funciona de manera que genera el voltaje sinusoidal requerido.
4.1.1
Diseño del módulo de software
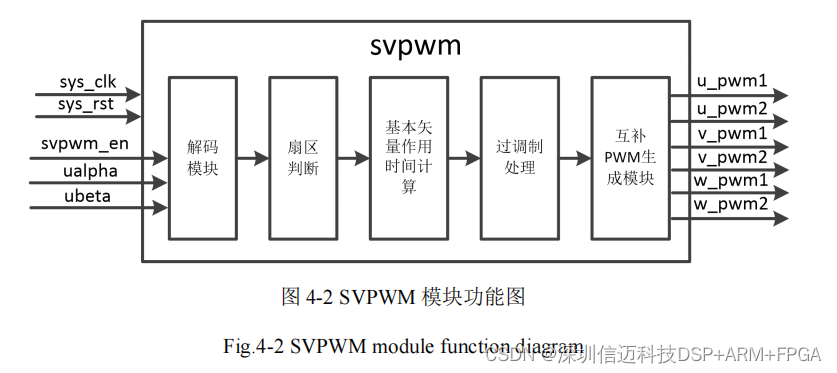
El diagrama de estructura funcional del módulo
SVPWM se muestra en la Figura
4-2
. Las señales del módulo se interpretan de la siguiente manera:
(
1
)
sys_clk
: Reloj del sistema, la frecuencia de funcionamiento es de
50MHz
.
(2)
sistema_primero
: Reinicio del sistema, activo bajo.
(3)
svpwm_en
: Señal de habilitación del módulo.
(4)
ualpha
,
ubeta
: la señal de salida del módulo de conversión
Park inverso
.
(5) Otros
: Seis ondas
PWM complementarias
.
El principio de funcionamiento y la fórmula de cálculo de este módulo se elaboraron en el segundo capítulo, por lo que no entraré en detalles aquí.
Sin embargo, cabe señalar que debido al retraso mecánico de la conmutación del inversor, es necesario generar un complemento
Onda PWM
, que puede evitar cortocircuitos y lesiones causadas al abrir los brazos del puente superior e inferior al mismo tiempo.
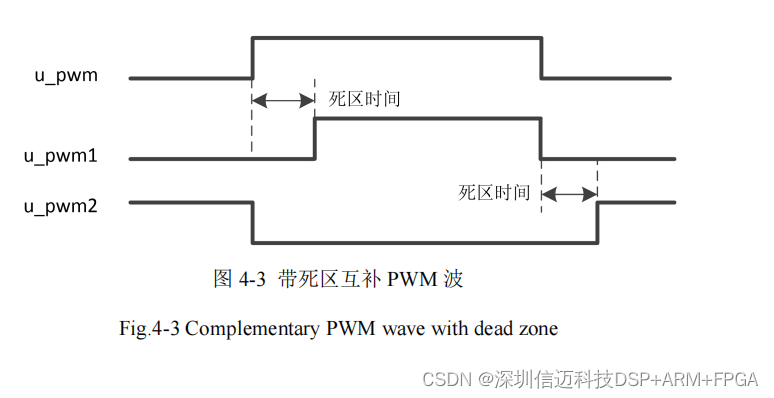
El principio de generar una onda PWM complementaria
con zona muerta
es utilizar la onda
PWM calculada
como objeto de referencia y luego de acuerdo con
La situación actual marca un tiempo muerto razonable. Suponiendo que la señal de entrada del inversor está activa en nivel alto, cuando el objeto de referencia cambia de nivel bajo
Cuando el nivel salta a un nivel alto, primero cierre el brazo del puente inferior, luego retrase el tiempo muerto y finalmente abra el brazo del puente superior; al referirse a
Cuando el objeto salta de un nivel alto a un nivel bajo, primero cierre el brazo del puente superior, luego retrase el tiempo muerto y finalmente abra el brazo del puente inferior.
El efecto se muestra en la Figura
4-3
. Tomando
la fase U
como ejemplo,
u_pwm en la figura
es la
onda
PWM de referencia calculada,
u_pwm1
es la onda PWM
del brazo del puente superior
y
u_pwm2
es la onda PWM del brazo del puente inferior.
4.1.2
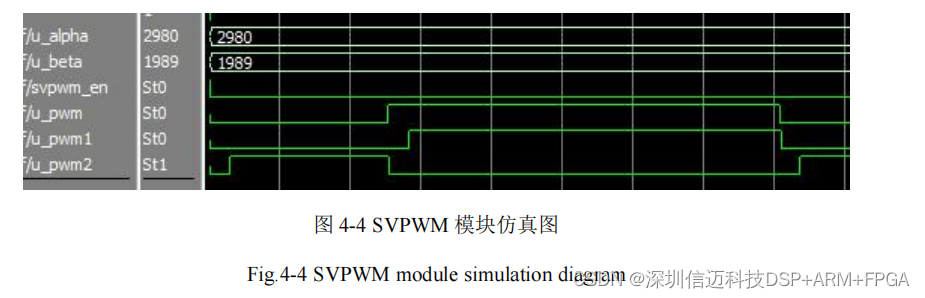
Prueba de simulación
Realice la verificación de simulación en el módulo
SVPWM y los resultados se muestran en la Figura
4-4 . Se puede ver en la figura que cualquier
El valor se asigna a
u_alpha
y
u_beta
, y luego el sistema genera una
señal de ciclo de reloj
svpwm_en , después de la operación.
Obtenga
u_pwm
como onda
PWM de referencia
.
Genera ondas PWM complementarias u_pwm1 y u_pwm2 según
la señal u_pwm
,
Hay un tiempo muerto entre ambos. De los resultados de la simulación se puede ver que el módulo normalmente puede generar ondas PWM complementarias.
4.2 Diseño del programa del protocolo BISS-C
4.2.1 Estructura de datos del protocolo BISS-C
El protocolo BISS
proviene de la empresa
iC-Haus
, es adecuado para la interfaz serial bidireccional del sensor y tiene
calibración
CRC .
La función de verificación garantiza que los datos transmitidos sean correctos. En comparación con otros protocolos de comunicación similares,
el protocolo BISS
tiene ventajas en cuanto a compatibilidad y estructura de red.
Tiene más ventajas en términos de alta velocidad y retardo que
SSI
, y la velocidad de comunicación puede alcanzar hasta
10 Mbps
. Al mismo tiempo,
BISS
La longitud de los datos del protocolo se puede modificar según la situación real y tiene buena escalabilidad.
El
protocolo BISS tiene dos modos de trabajo
[43]
El modo de trabajo diseñado en este artículo es el modo sensor y
el
FPGA
El codificador envía un comando de solicitud de posición y el codificador devuelve información relevante. En modo sensor,
datos
BISS-C
El formato se muestra en la Figura
4-5 a continuación
. El host envía
la señal del reloj MA
a la escala de rejilla y el codificador serializa a través de la
línea de datos
SLO
Devolver información de datos.
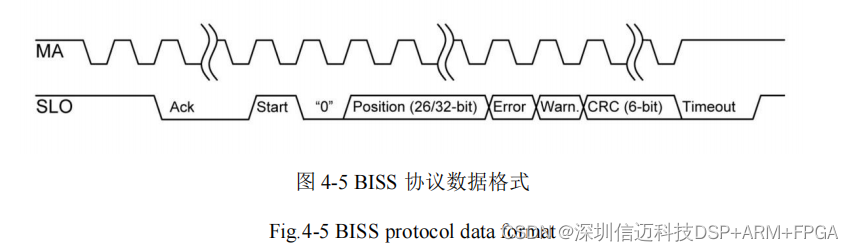
La trama de datos BISS-C consta de ocho partes, que son la fase de respuesta "Ack" , el bit "Inicio" , el bit "0",
Varios bits de datos de posición, un bit de error, un bit de advertencia, seis códigos de verificación
CRC
y
el resultado del tiempo de espera
"Timeout"
Etapa final. El ciclo de solicitud de comunicación específico es el siguiente
[44]
:
(
1 ) Cuando no es una solicitud de posición, la señal del reloj está en un nivel alto y
la línea de datos SLO
del host que lee el codificador
está en un nivel alto
Normalmente, significa que el codificador está listo.
(
2 ) Cuando el codificador está listo, el host comienza a transmitir la señal de reloj
MA
de frecuencia fija
a la escala de rejilla.
(
3
) El codificador pondrá la
línea SLO en nivel bajo cuando detecte el segundo flanco ascendente del reloj
MA enviado por el maestro.
nivel como respuesta.
(
4
) El codificador avisa al host tirando hacia abajo
de la línea de señal SLO
. El codificador actual está en
el estado de respuesta Ack
y el host
La máquina debe cambiar al estado de recepción a tiempo.
(
5
) El host se sincronizará con
la señal del reloj MA
para recibir el codificador y enviar los datos, y el formato del marco de datos es de bits altos.
El bajo delantero está detrás.
(
6
) Después de recibir todos los datos, el host eleva
la línea del reloj MA
. Cuando el codificador está listo para la siguiente posición
Cuando se solicita, el codificador establece
la línea SLO
en un nivel alto para avisar al host; de lo contrario, permanece bajo.
4.2.2
Diseño del módulo de software
El diagrama de estructura funcional del módulo
BISS se muestra en la Figura
4-6
, que se compone principalmente del
módulo
MA , el módulo
SLO y el módulo CRC .
Las señales del módulo se interpretan de la siguiente manera:
(
1
)
biss_es
: Señal de habilitación del módulo, utilizada para obtener información de posición del codificador.
(2)
longitud_datos
: Configuración del ancho de bits de datos del codificador.
(3)
SLO
:
Línea de datos del protocolo
BISS .
(4)
MA
:
Línea de reloj del protocolo
BISS .
(5)
datos_abs
: Valor absoluto de una sola vuelta, utilizado para el conteo de varias vueltas y el cálculo de ángulos eléctricos de codificadores circulares.
(6)
pos_abs
: Los datos de posición total real del codificador.

El principio de funcionamiento específico de este módulo es el siguiente: primero,
la FPGA
establece el ancho de bits de los datos de posición de acuerdo con el modelo de escala de red real
Valor data_lentgh
, este módulo cumple con el requisito de diseño de que la longitud del ancho de bits de los datos de posición esté dentro de
32 bits
. A través del módulo de control principal
Envíe la señal de habilitación
biss_en
al módulo
MA
,
el módulo de reloj MA
comienza a funcionar y envía una frecuencia fija a la regla de rejilla
La señal del reloj
MA
solicita obtener el valor de posición actual.
Después de que la FPGA
reciba los datos devueltos por la escala de rejilla, ingresará
Vaya al módulo de verificación
CRC
para verificar los datos y finalmente envíe los datos de posición correctos al módulo del siguiente nivel.
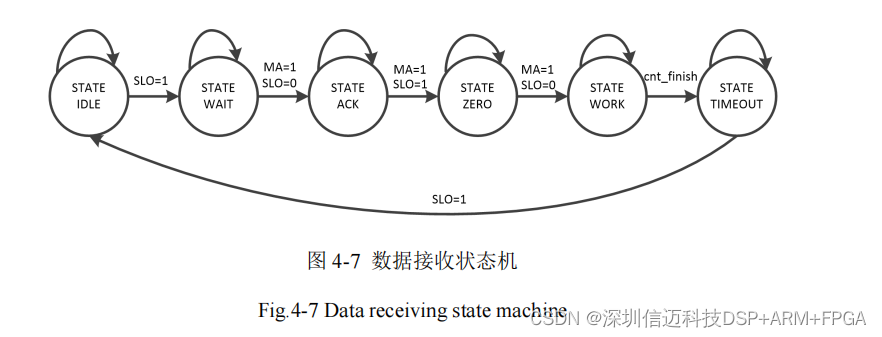
De acuerdo con las características del diagrama de tiempos del protocolo
BISS
, este artículo divide el proceso de recepción de datos por parte del módulo
SLO
en seis estados,
La máquina de estados funciona como se muestra en la Figura
4-7
. Al principio, el módulo de función está en estado inactivo y entra en estado de espera; cuando
Cuando la regla de rejilla baja
la
línea de señal SLO, ingresa al
estado de respuesta
Ack ; cuando
el SLO cambia de nivel bajo a nivel alto, el estado
La máquina de estado ingresa
al
estado STATE_ZERO; cuando se detecta que
la línea de datos SLO
está baja, el módulo ingresa al estado de funcionamiento y comienza
Reciba datos e ingrese al estado "TIMEOUT" después de recibir los datos de ancho de bits establecidos.
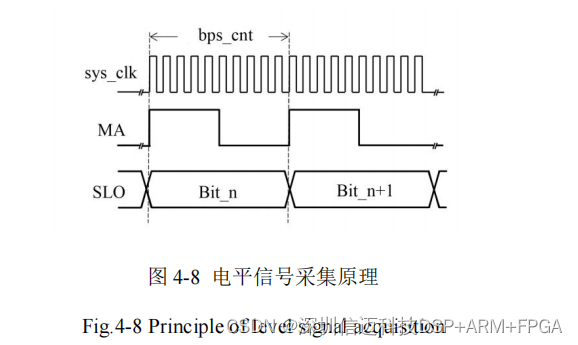
En la ingeniería real, hay fallas o fenómenos metaestables en el nivel de datos, si de acuerdo con
el flanco ascendente del reloj
MA
La señal obtenida al leer el estado de nivel de la línea de datos SLO actual no es confiable.
Generalmente, durante la transmisión
El estado de nivel en el medio de los datos es relativamente estable y confiable. Por lo tanto, el método adoptado en este trabajo es: en la parte media
Muestrear
la línea de datos SLO
varias veces y juzgar qué nivel tiene el número más grande y, finalmente, el valor de la señal de nivel con el número más grande
Sentencia asignada al registro. El principio de implementación específico se muestra en la Figura
4-8
, donde
sys_clk
es el reloj del sistema y
bps_cnt
es un
El número de muestras del nivel de línea de datos SLO en un ciclo de reloj
MA .
La frecuencia de reloj MA real se compara con la frecuencia interna de FPGA.
La frecuencia operativa es un reloj de baja velocidad, por lo que se pueden realizar múltiples muestreos en un
ciclo de reloj
MA .
en cada
Durante los ciclos del reloj
MA , cuando
se detecta el flanco ascendente del reloj
MA
,
El registro bps_cnt
comienza a contar muestras desde cero,
Luego juzgue si la cantidad de niveles altos es grande o la cantidad de niveles bajos es grande, y finalmente se acumulará el valor del lado con la mayor cantidad de niveles.
Asignar a un registro. Repita este proceso para recibir todos los datos.
Después de que el módulo
SLO
recibe los datos, devuelve una señal de finalización de recepción al módulo
MA
y al módulo de verificación
CRC
.
modo
MA
Después de que el bloque reciba la señal de finalización,
la FPGA
elevará
la línea de reloj MA
y
el
módulo CRC configurará el
modo
SLO en
La trama de datos transmitida por el bloque está sujeta a la operación de verificación
CRC
.
El polinomio CRC del protocolo
BISS-C es
G ( x ) x 6 x 1 ,
Es decir, el campo de verificación es
1000011
. Para aprovechar al máximo las características de trabajo del procesamiento paralelo
FPGA
y mejorar aún más la eficiencia del trabajo
velocidad, este artículo utiliza un algoritmo de verificación
CRC paralelo
para obtener el código de verificación
CRC
en un ciclo de reloj, el código principal
Como se muestra en la Figura 4-9:
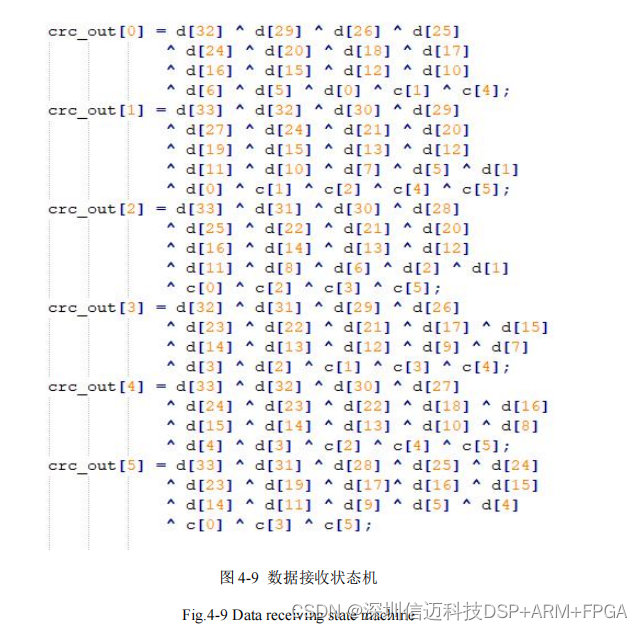
Entre ellos,
d [33:0]
son los datos que deben verificarse y
crc_out [5:0]
es
la operación del módulo
CRC en los datos que deben verificarse.
El resultado obtenido después del cálculo, el valor inicial de
c[5:0]
es cero y finalmente el resultado del cálculo se compara con el
código de verificación
CRC recibido.
coincidencias de línea. Si los dos son consistentes, significa que el módulo
SLO
recibe los datos correctamente y actualiza los datos de posición correctos para
En el módulo del siguiente nivel, de lo contrario, actualice los datos correctos reservados la última vez y prepárese para iniciar la siguiente solicitud de posición del ráster.
4.2.3
Prueba de simulación
Finalmente, escriba un archivo de prueba para
simular y verificar el módulo
BISS
en el software
ModelSim y aplicarlo en ingeniería real.
La estabilidad juega un papel importante.
Por lo tanto, se seleccionan los 5 Mbps más altos
en términos de velocidad de comunicación
, por lo que el modelo en el archivo de prueba
El codificador virtual transmite datos a
la FPGA a una velocidad de comunicación de
5 Mbps
. Este artículo es para posiciones de 26 y 32 bits de uso común.
Se prueban los modelos de codificadores de ancho de bits de datos.
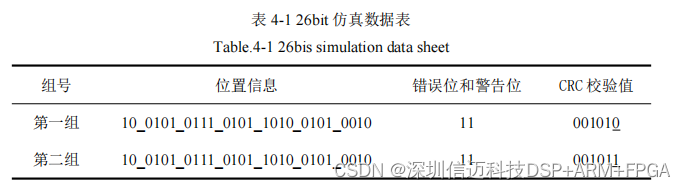
Primero, configure dos conjuntos de datos para modelos
de 26 bits de ancho como
se muestra en la Tabla 4-1, donde el primer conjunto y el segundo conjunto de datos son solo
Sólo el último bit del código de verificación
CRC
es diferente y el segundo conjunto de datos es completamente correcto. A través de este artificial
Los datos establecidos pueden probar
si los dos conjuntos de información de datos recibidos por el módulo
BISS son consistentes y también detectar el
modo de verificación CRC.
bloque para que funcione correctamente. Cabe señalar que
el valor de verificación CRC del protocolo
BISS-C
es el primero
Se envía al host mediante inversión, por lo que
el valor de verificación CRC
en la tabla se ha invertido. así que haz una combinación
Al comparar y verificar,
la FPGA
debe invertir el valor de verificación
CRC calculado
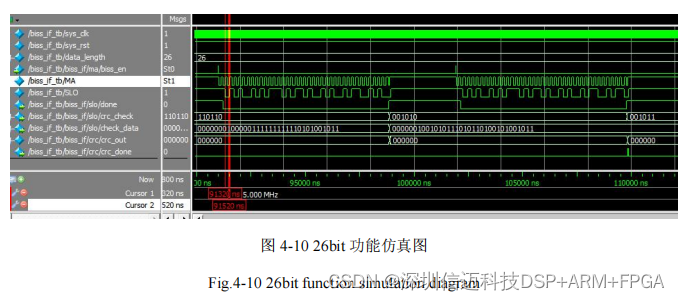
y compararlo con el valor recibido. El conjunto
Los resultados de la prueba corporal se muestran en la Figura 4-10.
El diagrama de tiempo del lado izquierdo de la figura es el primer conjunto de datos, mientras que el de la derecha es el segundo conjunto de datos. En la figura,
crc_check
está recibiendo
Valor CRC , check_data son los datos a verificar, done es la señal de finalización de recepción de datos, crc_out
es
la verificación
El
valor
CRC calculado,
crc_done, significa que la verificación está completa, es decir, los datos recibidos son correctos. Se puede ver en la imagen.
En el modo de datos donde
data_length
es
de 26 bits
, después de que el módulo recibe la
señal de habilitación
biss_en ,
la FPGA envía el
El codificador envía una señal de reloj
MA con una frecuencia de
5MHz
. El codificador pasa los datos SLO después de detectar la señal del reloj MA .
La línea devuelve datos al host y cuando
la
FPGA
termina de recibir los datos,
transmite el valor de verificación
CRC recibido
y
Es necesario verificar los datos y
se envía una señal de finalización para que
el módulo
CRC funcione. Entonces el módulo CRC necesita verificar el
Los datos verificados se procesan y, después del procesamiento , se comparan con el valor de verificación
CRC recibido, si los dos coinciden correctamente.
Luego se genera una señal de marca exitosa
crc_done con un pulso de nivel alto
; de lo contrario, la señal crc_done permanece baja.
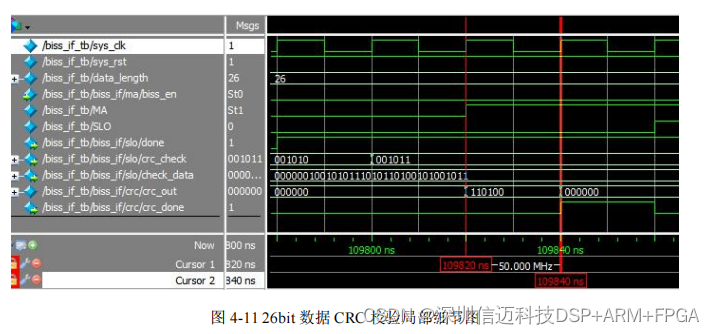
Verifique más a fondo
los detalles de la verificación
CRC , como se muestra en la Figura
4-11 . El valor de verificación CRC recibido crc_check en la figura
es
001011
y
crc_out es 110100 después de realizar la verificación
CRC en los datos que se van a verificar
. sección anterior también
Hablando de eso, el valor de verificación CRC
del codificador
primero se invierte y se envía al host, y los datos obtenidos después de la operación de verificación
crc_check
no está invertido, por lo que se puede ver que es consistente con el valor de verificación
CRC recibido
después de la inversión. También se puede ver en la figura.
El tiempo requerido para la verificación
CRC
es un ciclo de reloj del sistema, por lo que se puede concluir que el módulo de verificación CRC puede funcionar normalmente.
De los dos diagramas de resultados de simulación anteriores, se puede ver que
cuando el módulo
BISS
normalmente puede enviar MA a una velocidad de comunicación de 5 Mbps
La señal del reloj y los datos del codificador se reciben por completo y, finalmente,
la operación de verificación CRC
se completa en un ciclo de reloj. Por lo tanto todos
El módulo
BISS diseñado
ha pasado la prueba de simulación de función en modo
de 26 bits
.
De manera similar, se establece la prueba de simulación del modelo
de 32 bits de ancho
, y el conjunto de datos de simulación se muestra en la Tabla
4-2
, y la simulación de función
Las Figuras 4-12 y 4-13 muestran la imagen real y los detalles de la verificación
CRC
. Se puede ver en la figura que el módulo BISS diseñado también es
Pasó la prueba de simulación de función en modo de 32 bits.
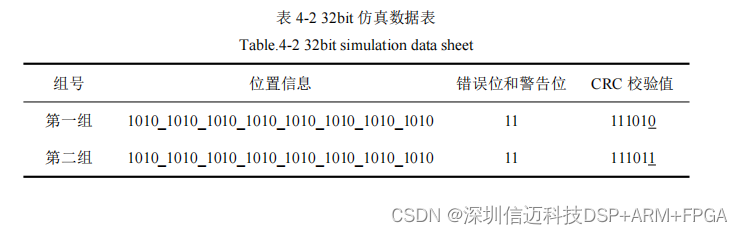

Por lo tanto, se puede concluir que el módulo BISS
diseñado en este trabajo
puede cambiar
el
registro data_lentgh para poder
Comunicación de 5 Mbps
para recibir completamente
los datos del codificador con un ancho de bits de datos de
32 bits .
4.3
Diseño del programa del protocolo Tamagawa
4.3.1
Estructura de datos del protocolo Tamagawa
El acuerdo de Tamagawa proviene de la Corporación Tamagawa de Japón y utiliza un método de comunicación de "una pregunta, una respuesta".
De esta manera, el host envía diferentes comandos de solicitud al codificador para obtener información de datos diferente
[45]
. Se comunica con una cuerda.
La comunicación del puerto es consistente y al enviar un byte de datos , se transmitirá desde el bit bajo a una velocidad de transmisión fija de
2,5 Mbps .
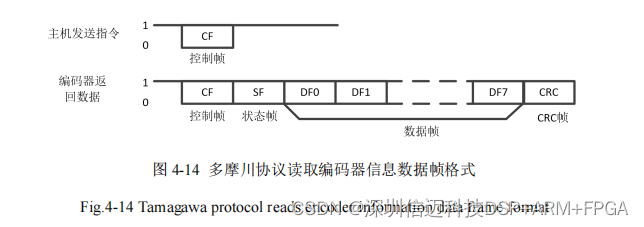
Este artículo solo se centra en el modo de funcionamiento del protocolo Tamagawa para leer la información del codificador.
El formato del marco de datos para leer el modo de información del codificador se
muestra en la Figura 4-14. Su principio de funcionamiento es: el host envía
Se dan diferentes comandos del marco de control al codificador para obtener la información correspondiente y luego el codificador devuelve un conjunto de datos como respuesta.
Este grupo de datos consta de marcos de control, marcos de estado, varios marcos de datos y
marcos
CRC .
Entre ellos, según los diferentes modelos de codificador,
La cantidad de marcos de datos variará.
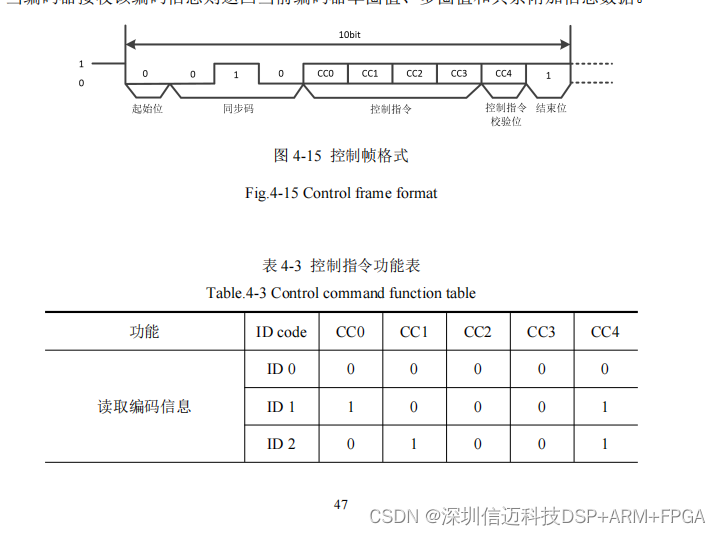
El formato de datos del marco de control se muestra en la Figura
4-15
. La parte del sujeto de datos del marco consta de código de sincronización, instrucción de control y control.
El dígito de control de instrucciones consta de tres partes. Entre ellos, el código de sincronización es fijo, mientras que el comando de control y su dígito de control tienen características específicas.
código de comando, como se muestra en la Tabla
4-3
. Diferentes códigos de instrucción representan diferentes funciones y los tipos de datos devueltos por el codificador también son
diferente. Por ejemplo, si el usuario desea obtener el valor de una sola vuelta y el valor de varias vueltas del codificador, consulte la Tabla
4-4
para saber que la
instrucción numerada
ID 3
El código corresponde al codificador que devuelve un valor de una sola vuelta y un valor de varias vueltas, por lo que el host puede enviar el código al codificador como:
01011000
,
Cuando el codificador recibe la información codificada, devuelve el valor de una sola vuelta del codificador actual, el valor de varias vueltas y otros datos de información adicional.

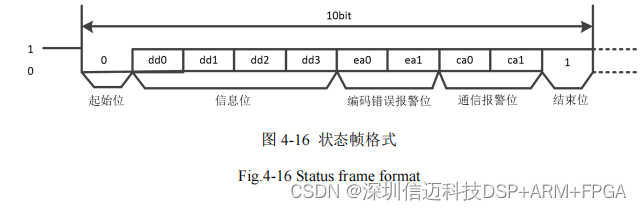
El formato de datos del marco de estado se muestra en la Figura
4-16
, que consta de bits de información, bits de alarma de error de codificación y bits de alarma de comunicación.
Diferentes modelos de codificador corresponden a diferentes bits de información. Para significados específicos, consulte el manual del codificador correspondiente.
introducir. Si el código del codificador es incorrecto o hay un problema con la fuente de alimentación externa del codificador, el bit de alarma de error del codificador
ea0
Si es
1
, significa que la información de codificación actual es incorrecta, y cuando
ea1
es
1
, los datos del valor de múltiples vueltas del codificador son incorrectos. Bit de alarma de comunicación
Cuando ca0
es
1
, significa que el bit de verificación del comando de control en la trama de control recibida tiene un error, mientras que
ca1
es
1
, significa que todos
Se produjo un error en el bit final de la trama de control recibida.
El codificador absoluto Tamagawa puede realizar datos de codificación de posición de alta resolución con un ancho de bits de hasta
39 bits
, incluidos
Valor de una sola vuelta de 23 bits
y
valor de múltiples vueltas
de 16 bits .
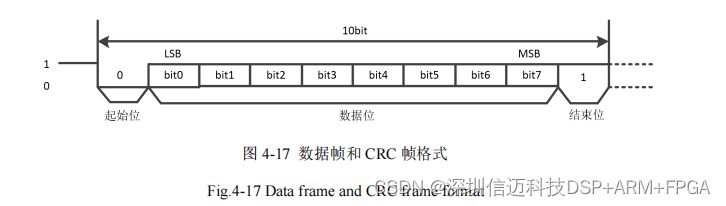
Pero la comunicación con el protocolo Tamagawa solo envía datos
de 8 bits
a la vez, así que envíe
Para enviar información de ubicación completa, se debe desmontar y luego enviar en un orden determinado. Un byte de datos específico
El formato de trama y el formato de trama
CRC
se muestran en la Figura 4-17.
Dado que el host envía diferentes códigos de comando al codificador, los tipos de datos devueltos por el codificador también son diferentes. Según codificador
Con diferentes resoluciones y códigos de comando, el número de tramas de datos efectivas devueltas por el codificador también es diferente. Por ejemplo, solo se puede obtener el valor de una vuelta.
o valor de múltiples vueltas, devuelva un marco de datos válido de
3 bytes y devuelva
8
si necesita obtener tanto el valor de una sola vuelta como el valor de múltiples vueltas
Un marco de datos válido de bytes. El marco de datos correspondiente al código de función específico se muestra en la Tabla 4-4.
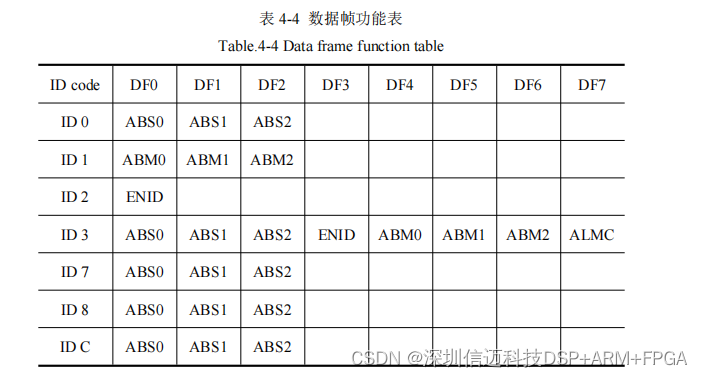
En la tabla,
ABS
representa el valor de código absoluto de una sola vuelta,
ABS0
son los ocho bits inferiores de los datos de posición de una sola vuelta y
ABS1
es la posición de una sola vuelta.
Los ocho bits del medio de los datos,
ABS2
son los ocho bits superiores de los datos de posición de una sola vuelta, si el número de valores de código de una sola vuelta del codificador es inferior a
24 bits
, los bits altos se rellenan con
0
. De manera similar,
ABM
representa el valor del código absoluto de múltiples vueltas,
ABM0
son los ocho bits inferiores de los datos del valor de vuelta,
ABM1
Son los ocho bits del medio de los datos del valor del círculo y
ABM2
son los ocho bits superiores de los datos del valor del círculo. Si el número de valores de código de múltiples vueltas del codificador es menor que
Para 24 bits
, los bits altos se rellenan con
0
. Entonces, para un codificador de alta precisión, el codificador combinará el valor de una sola vuelta de varios bits y el valor de varias vueltas.
Cada valor se divide en
3
bytes de datos y luego se envía secuencialmente desde los ocho bits inferiores hasta que se completa el envío.