Este capítulo presenta primero la situación general del sistema
PLC existente
y luego presenta el controlador industrial general diseñado en este documento.
La arquitectura general de la solución, analiza las funciones que deben realizarse en el hardware y el software, y finalmente analiza las funciones de cada parte y propone
planes de implementación específicos.
2.1
Introducción al sistema PLC
El controlador lógico programable (
controlador lógico programable
,
PLC
) se basa en el microprocesador,
Un nuevo tipo de control automático universal desarrollado combinando tecnología informática, tecnología de control automático y tecnología de comunicación.
dispositivo
[14]
. Utiliza un tipo de memoria programable para su almacenamiento interno de programas, ejecución de operaciones lógicas, control de secuencia,
Instrucciones orientadas al usuario, como
sincronización, conteo y operaciones aritméticas, y
control de varios tipos de
El proceso mecánico o de producción es la parte central del control industrial
[15]
.
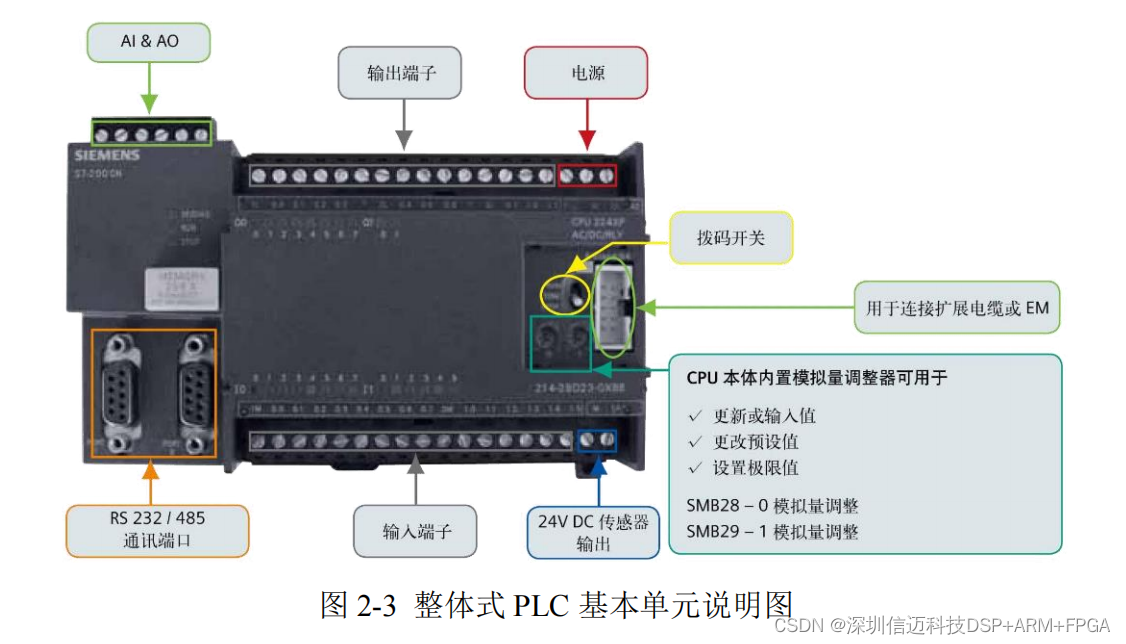
El PLC de la serie Siemens
S7-200
es un PLC integral y la Figura 2-4 muestra el interior de una de las unidades básicas del PLC .
Diagrama estructural, su estructura se compone de tres partes: la parte superior es la placa central o
CPU
, que incluye el interruptor de dial, unidad de expansión
interfaz; la parte central es la placa de interfaz, que incluye la interfaz
de E/S
, la interfaz de comunicación
RS485
, la interfaz de entrada de alimentación
de 220 V
CA,
Interfaz de salida de alimentación de 24 V
CC, etc.; la parte inferior es la placa de alimentación conmutada, entrada
de 220 V
CA, salida de 24 V CC.

2.1.3 Sistema de software PLC
El software PLC
incluye programas del sistema y programas de usuario. El programa del sistema se solidifica dentro del chip de la CPU.
El usuario no puede modificar directamente el programa y el programa del sistema incluye detección de estado anormal y operación de la unidad
de E/S
.
Operación, ejecución del programa de usuario, comunicación con el mundo exterior y otras funciones. El usuario utiliza el programa de usuario para que coincida con el
controlador
PLC.
El programa desarrollado por el software de desarrollo, el lenguaje de desarrollo más utilizado es el lenguaje de diagrama de escalera (
LD
), además del lenguaje de instrucción.
lenguaje (
IL
), lenguaje de diagrama de bloques de funciones (
FBD
), lenguaje de diagrama de flujo de funciones secuenciales (
SFC
), lenguaje de texto estructurado (
ST
).
Para el usuario, no es necesario comprender el programa del sistema en detalle, solo necesita escribir el programa de usuario de acuerdo con los requisitos de producción reales para realizar la lógica.
El control de edición puede ser
[28]
.
Muchos bloques de funciones ya preparados se utilizan a menudo al editar diagramas de escalera, como módulos de temporizador, módulos de contador, alta velocidad.
Módulo contador, módulo de entrada analógica, módulo de salida analógica, módulo
PID
, módulo de comunicación y otros bloques funcionales, estos
El proceso de realización de los bloques de funciones está incluido en el programa del sistema y el programa de usuario solo llama a estos bloques de funciones cuando utiliza estos bloques de funciones.
Proceso de implementación
[29]
.
2.2
Arquitectura general del programa
Este artículo adopta la estructura
PLC integral
, como se muestra en la Figura
2-7
, la estructura general se divide en el controlador principal y el módulo remoto, el principal
El controlador se compone de una placa central, una placa de interfaz, una fuente de alimentación conmutada, una unidad de procesamiento central integrada (
CPU
), una unidad
de E/S
y una fuente de alimentación.
En uno. Como módulo de expansión, el módulo remoto se utiliza en sitios industriales con área grande y amplio rango, de modo que el controlador principal necesita


Para controlar dispositivos de campo a larga distancia, al mismo tiempo, se puede aumentar el número de puntos de
E/S para el controlador principal
, de modo que el controlador se pueda extender a una gran distancia.
y acercarse en la dirección de la modernización y la multifuncionalidad. El módulo remoto incluye principalmente módulo de entrada digital (
DI
), módulo de salida digital (
DO
),
Módulo de entrada analógica (
AI
), módulo de salida analógica (
AO
) y módulo de comunicación Ethernet (
EN
), entre los cuales Ethernet
El módulo de comunicación es el principal responsable de comunicarse con el controlador principal, enviando el estado y los datos de cada módulo remoto al controlador principal y
Reciba comandos de control del controlador maestro.
El controlador diseñado en este artículo realiza principalmente las siguientes estructuras y funciones:
En términos de hardware: la placa PCB
de hardware
debe incluir la placa central, la placa de interfaz, la fuente de alimentación conmutada, el módulo de comunicación Ethernet y el módulo digital.
Módulo de entrada de cantidad de palabras, módulo de salida de cantidad digital, módulo de entrada de cantidad analógica, módulo de salida de cantidad analógica. La placa de interfaz necesita paquete
Incluye interfaz de entrada y salida digital, interfaz de entrada y salida analógica, interfaz de entrada y salida digital de alta velocidad,
USB de alta velocidad
Interfaz de comunicación, interfaz de comunicación
RS485
, interfaz de comunicación Ethernet, etc.
Software: protocolo de comunicación
Modbus
, como protocolo de datos cuando el controlador principal se comunica con el módulo remoto;
El protocolo de comunicación interno del módulo se utiliza como protocolo de datos para la comunicación entre módulos remotos. Diseñar funciones de control modulares,
Incluyendo el control de movimiento y el control de procesos que se utilizan a menudo en sitios industriales, y el algoritmo de control
PID
se utilizará al mismo tiempo, si es necesario.
Para accionar un convertidor de frecuencia o un inversor
también se utilizará
el algoritmo SPWM
y el algoritmo
SVPWM .
Diseño de un contador de alta velocidad
Módulo para adquirir señales de sensores como codificadores rotativos. Diseñe la interfaz de interacción persona-computadora, que sea conveniente para que la operen los trabajadores en el sitio.
controlador. Diseñar el lenguaje de programación del programa de usuario, como puente entre el lenguaje natural humano y el lenguaje de programación del chip subyacente,
Es conveniente para los trabajadores comunes y corrientes sin ninguna base en lenguajes de programación realizar programación y pruebas en el sitio.
2.3
Diseño del esquema del controlador principal
El diseño del esquema general del controlador principal se muestra en la Figura
2-8
, que se divide en placa central, placa de interfaz y fuente de alimentación conmutada.
Symmet proporciona soluciones de control de movimiento STM32+FPGA.
Casi todas las interfaces externas del controlador principal están diseñadas en la placa de interfaz, solo está diseñada la interfaz conectada al módulo de expansión local.
Cuente con el tablero central.
Debido al volumen limitado del controlador principal, el número de interfaces y puntos
de E/S
incluidos son limitados, como
Si se necesitan más puntos
de E/S
, la interfaz Ethernet debe conectarse al módulo remoto para su uso. La interfaz externa del controlador principal incluye
16
Interfaz de entrada digital de 16 vías,
interfaz de salida digital
de 16 vías (salida de relé),
interfaz de salida digital de alta velocidad de 8 vías (cristal
Salida del tubo del cuerpo),
interfaz de entrada de alimentación
de 220 V CA, interfaz de salida de alimentación
de 24 V CC, interfaz de comunicación USB de alta velocidad ,
Interfaz de comunicación RS485
, interfaz de comunicación Ethernet. Dentro del controlador principal, la fuente de alimentación conmutada está conectada a la placa de interfaz y la placa de interfaz
Introduzca la entrada de alimentación
de 220 V CA desde
el exterior a la placa de la fuente de alimentación conmutada y luego se estabilizará después de pasar a través de la fuente de alimentación conmutada.
Una fuente de alimentación fija
de 24V DC.
La placa de interfaz está conectada a la placa central, una es de
5 V y se obtiene reduciendo
24 V
a través de
CC/CC.
La energía se transmite a la placa central y la segunda es transmitir señales
de E/S
y comunicación del puerto serie con el chip de control en la placa central.
2.3.1
Diseño del esquema del tablero central
La estructura de hardware de la placa central incluye un circuito de chip de control, un circuito de descarga, un circuito de oscilador de cristal, un circuito de reinicio y una fuente de alimentación del chip.
circuito,
circuito de comunicación
RS485 , circuito de selección de estado, circuito de indicación de estado,
circuito de indicación de E/S , circuito de conversión de nivel
esperar.
El chip de control se controla mediante el método actualmente popular "
MCU+FPGA "
[32] . MCU es un microcontrolador
Unidad (
Micro Controller Unit
), también conocida como microcomputadora de un solo chip o microcomputadora de un solo chip, es la unidad central de procesamiento, memoria,
Contador,
USB
,
conversión
A/D ,
UART , PWM , DMA y otras interfaces periféricas están integradas en un chip para formar
Las computadoras a nivel de chip se utilizan en campos de control como teléfonos móviles, controles remotos, automóviles y brazos robóticos.
Los FPGA
son programables en campo
Matriz de puertas (
Field Programmable Gate Array
), que es un circuito semipersonalizado en ASIC, generalmente
La matriz de puertas lógicas de bajo nivel se combina mediante programación para realizar
la conexión entre los módulos internos y
las E/S .
FPGA
tiene las siguientes ventajas: alto paralelismo, puede admitir múltiples módulos para realizar cálculos independientes al mismo tiempo; se puede personalizar, es decir,
Realice su propio circuito lógico a través de la programación y se puede programar infinitamente; la velocidad de operación es rápida y la tarea generalmente está en
La ejecución en hardware es más rápida que la ejecución en software. Por ejemplo, comparando
el tamaño de
64 bits,
32 bits
alto
y 32 bits bajo, la CPU
Lo siguiente requiere
2
instrucciones de número de área, dos instrucciones de bits y, una instrucción de desplazamiento, una instrucción de comparación y una instrucción de reescritura, y
Según
la FPGA,
sólo se requiere un comparador.
Al mismo tiempo,
FPGA también tiene desventajas: todas las funciones dependen de la implementación del hardware.
Ahora, operaciones como condiciones de bifurcación y saltos no se pueden realizar y, al mismo tiempo , hay pocos periféricos como conversión
A/D ,
flash , etc., que simplemente se pueden realizar.
Suficiente para confiar en
MCU
para compensar. Por lo tanto, este artículo utiliza la combinación de
MCU
y
FPGA
para maximizar las ventajas de ambos.
Autoventaja
[33]
.
La MCU elige
el microcontrolador STM32 de 32 bits
desarrollado por STMicroelectronics , que se basa en
ARM
El microcontrolador integrado con núcleo de procesador Cortex-M
tiene las características de alta integración y bajo consumo de energía.
selección
de FPGA
Los chips de la serie Cyclone IV
de
ALTERA , que se basan en Cyclone , CycloneII y CycloneIII
Basado en la mejora del rendimiento y la reducción de costes.
STM32
utiliza sus propios periféricos ricos como chip de control principal, utilizando
UART
Comunicarse con el mundo exterior;
FPGA
procesa señales de E/S
utilizando las características de velocidad informática rápida y buena concurrencia .
STM32
Los métodos de comunicación con
FPGA
incluyen comunicación en serie, comunicación paralela y comunicación de memoria compartida. Botas necesarias para la comunicación en serie
Hay menos pines, pero la velocidad no es tan rápida como la de los otros dos métodos de comunicación; el método de comunicación de memoria compartida es más complicado en el circuito de hardware.
Generalmente se usa en ocasiones con una gran cantidad de intercambio de datos, y es un poco excesivo usarlo aquí; aunque la comunicación paralela ocupa más pines,
Pero la eficiencia de la comunicación es alta
[34]
. En general, elija el método de comunicación paralela.
El circuito de alimentación debe determinarse de acuerdo con el voltaje requerido por el chip de control. El chip de control
STM32
seleccionado en la placa central
El modelo específico es
STM32F103ZET6
, el voltaje de funcionamiento es
3,3 V
, el modelo específico de
FPGA
es
EP4CE6E22C8
,
Los voltajes de funcionamiento son
3,3 V
,
2,5 V
y
1,2
V.
Los métodos de descarga de STM32
incluyen los métodos
SWD
y
JTAG
. El modo
SWD
es más eficiente que
JTAG
en el modo de alta velocidad.
Más confiable, el
programa de descarga JTAG fallará
en el caso de una gran cantidad de datos , pero la probabilidad de
SWD será muy pequeña
Muchos, y
la cantidad de pines requeridos por
SWD es pequeña, lo que puede ahorrar espacio
en la PCB . Aunque STM32 tiene cristal interno de 8MHz
Oscilación, pero la precisión no es tan alta como la del oscilador de cristal de alta velocidad con configuración externa. Hay dos tipos de osciladores de cristal externos: oscilador de cristal de alta velocidad y oscilador de cristal de baja velocidad.
El oscilador de cristal de baja velocidad típico es de
32,768 KHz
, y el oscilador de cristal de alta velocidad se puede seleccionar entre
4 ~ 32 MHz
, y luego se puede configurar mediante el bucle de bloqueo de fase.
La frecuencia principal se eleva a
72MHz
. La interfaz del módulo de expansión que debe reservarse en la placa central se utiliza para conectar varios módulos de expansión.
El método de comunicación entre los módulos de expansión aquí elige la comunicación
RS485
, porque
RS485
admite un modo maestro y múltiples modos esclavo. al mismo tiempo
Es necesario diseñar un circuito de selección de estado y un circuito de indicación de estado alrededor de STM32
. El circuito de selección de estado utiliza un interruptor de dial como
La entrada de pin de STM32
, el circuito de indicación de estado utiliza
LED
como salida de pin de
STM32
.
FPGA
no tiene
flash en el chip
, por lo que los programas
FPGA
deben almacenarse en
un flash fuera del chip
, seleccione aquí
EPCS4SI8N
se utiliza como
flash fuera del chip de
FPGA
. Los métodos de descarga de FPGA incluyen el modo JTAG , el modo AS y PS
modelo.
En modo AS
, el programa se graba en el chip de configuración
EPCS
y cada vez que
se enciende
la FPGA , actúa como un controlador desde el chip de configuración.
Configure el chip
EPCS
para leer datos; el modo
PS
es usar
EPCS
como dispositivo de control, usar
FPGA
como memoria y
FPGA
Cuando se enciende,
EPCS
escribirá datos activamente en
FPGA
, este modo puede realizar
la programación en línea de
FPGA ;
El modo JTAG
es el modo más utilizado y graba directamente el programa en
la SRAM de
la FPGA
, por lo que después de un corte de energía
La secuencia desaparecerá.
Cuando la FPGA
funciona normalmente, sus datos de configuración se almacenan en
la SRAM
y deben descargarse nuevamente cuando se enciende.
En el sistema experimental, generalmente se usa una computadora o un controlador para la depuración, por lo que se puede usar
PS
. Pero en el sistema práctico
En la mayoría de los casos,
el proceso de operación de configuración debe ser guiado activamente por
la FPGA . En este momento,
la FPGA participará activamente
Los datos de configuración se obtienen del chip de almacenamiento y
la información de configuración FPGA
en este chip se obtiene utilizando un programador común para diseñar
el .pof.
El archivo de formato se graba a través de
AS
.
Grabar el archivo .sof a través del modo
JTAG
grabará el programa en la SRAM ,
Sin embargo, a través de la conversión de archivos,
el
archivo .sof se convierte en
un
archivo .jic y
el programa pasará a través de la FPGA mediante la grabación en modo
JTAG .
Se solidifica en el chip de configuración
EPCS
, de modo que
la FPGA
leerá
el programa
del EPCS cuando se vuelva a encender.
El examen final de este artículo.
Considerando la conveniencia de la depuración, elegimos
el modo JTAG
.
La frecuencia principal de la FPGA
necesita un oscilador de cristal externo, y
el STM32
tiene un circuito de inicio del oscilador de cristal en el interior, por lo que se puede utilizar un oscilador de cristal pasivo.
Pero
FPGA
no lo tiene, por lo que
FPGA
solo se puede conectar con un oscilador de cristal activo, aquí elija
50 MHz
como fuente de reloj
FPGA
.
Se puede obtener un reloj de hasta 300 MHz
multiplicando la frecuencia del bucle de bloqueo de fase
.
Los pines FPGA
se pueden configurar como modo de entrada o modo de salida, todos los cuales son
señales
3.3VTTL .
Los
pines de entrada y salida de FPGA controlan directamente
los LED
como
luces indicadoras
de E/S , un total de
40 , 16 puntos de entrada, 16 de salida.
Punto de salida,
8
puntos de salida de alta velocidad. La placa central y la placa de interfaz están conectadas entre sí a través de conectores para transmitir señales de datos de puntos
de E/S
.
No., entre
el FPGA
y el conector también se conecta un chip de conversión de nivel, entre la señal
3.3VTTL
y la
señal
5VTTL
La interconversión y el chip de conversión de nivel pueden desempeñar un papel protector para evitar que los pines
FPGA
se conecten directamente al exterior
[35]
.
2.3.2
Diseño del esquema de la placa de interfaz
La estructura de hardware de la placa de interfaz incluye un circuito de entrada de optoacoplador, un circuito de salida de relé, un circuito de salida de transistor y
RS485.
Circuito de comunicación, circuito de comunicación
USB
, módulo de comunicación Ethernet,
circuito reductor
CC/CC , placa central y placa de alimentación.
circuito de interfaz, etc.
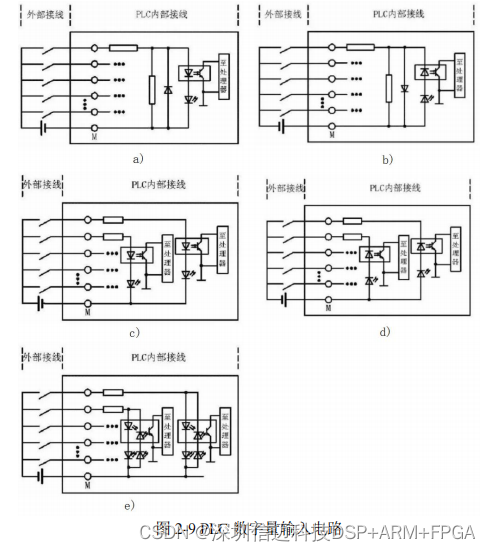
El circuito de entrada del optoacoplador se utiliza para ingresar la señal del interruptor externo. Generalmente,
el módulo de entrada del
PLC consta de varios puntos de entrada.
y una terminal común. Como se muestra
en la Figura
2-9 ,
a) yb ) son dos formas diferentes de circuitos de entrada de CC de PLC , la diferencia es que
Cuando el interruptor externo está cerrado,
la corriente en
a)
sale del PLC (entrada de fuente) desde el terminal común M , y la corriente en b) fluye desde el común
El terminal
M
desemboca en
el PLC
(entrada positiva). Cuando el interruptor está cerrado,
el diodo emisor de luz del optoacoplador dentro
del PLC se enciende y los tres fotosensibles
El tubo polar se satura y se enciende, y luego la señal se envía a la unidad central de procesamiento y se considera que hay una señal de entrada.
c)
y
d) son
a) y b)
respectivamente
Estructura de señal multicanal. Para adaptarse a más dispositivos de campo, este documento utiliza
el circuito de entrada híbrido que se muestra en
e) , optoacoplador
Elija un optoacoplador de entrada bidireccional y la forma del cableado externo puede ser tanto entrada de energía como entrada de sumidero.
2.5
Diseño del esquema de software
2.5.1
Sistema operativo integrado
Aunque las aplicaciones integradas pueden ejecutarse directamente en el chip, para llamar a la multitarea de manera más razonable,
Para aprovechar al máximo los recursos del sistema, este documento adopta
el esquema de trasplantar el sistema operativo integrado en
STM32 .
incrustación utilizada actualmente
Los sistemas operativos integrados incluyen
μClinux
,
μC/OS-II
,
eCos
y
FreeRTOS
.
μClinux
(
micro-control Linux ) es un
Linux
de microcontrol . En comparación con
Linux estándar , el kernel μClinux
Pequeño, pero aún hereda la buena estabilidad y portabilidad
de Linux
, tiene potentes funciones de red y excelente texto.
sistema de software, API
rico en estándares
y
protocolo de red
TCP/IP , etc.
En términos de trasplante, dado que
μClinux
es
Linux
Una mejora dirigida a sistemas embebidos, por lo que su estructura es más complicada y el procesador de destino necesita un externo.
ROM
y
RAM
, para
STM32F103
, trasplantar este sistema requiere al menos
512 KB
de espacio
RAM
,
1 MB
Espacio ROM
/FLASH
, y
STM32F103
solo tiene
256 KB
de
FLASH
, por lo que se requiere una memoria externa,
Esto aumenta los costos de hardware. Además,
μClinux
tiene una estructura compleja, es difícil de trasplantar y tiene un rendimiento deficiente en tiempo real, por lo que no es adecuado como
El esquema de trasplante de este sistema.
μC/OS-II
es
un kernel compacto, preventivo y multitarea en tiempo real escrito en lenguaje
C.
µC/OS-II
Se admiten hasta
64 tareas
, correspondientes a las prioridades
0~63
, donde
0
representa la prioridad más alta,
63
es la más baja y el sistema
Las 4
prioridades más altas y
las 4
prioridades más bajas
están reservadas , por lo que hay
56 tareas disponibles para el usuario
.
µC/OS-II
Puede proporcionar funciones como programación y gestión de tareas, gestión de memoria, sincronización y comunicación entre tareas, gestión del tiempo y servicio de interrupciones, etc.
Tiene las características de alta eficiencia de ejecución, tamaño reducido, excelente rendimiento en tiempo real y gran escalabilidad. En portabilidad,
μC/OS-II
Admite la mayoría de las
CPU más populares actualmente
. Debido a su pequeño núcleo, el código mínimo es de solo
2 KB
y se requiere espacio de datos.
Solo hay
4 KB
de
RAM
, por lo que la portabilidad es relativamente simple, solo es necesario modificar el código relacionado con el procesador, que es más adecuado.
Se puede trasplantar en este sistema juntos.
eCos
(
sistema operativo configurable integrado
) es un sistema operativo configurable integrado, un
El sistema operativo configurable, portátil y en tiempo real de Kaiyuan para aplicaciones profundamente integradas. su característica más importante
Es decir, el núcleo es configurable y la configuración flexible provocada por el método de diseño modular.La parte central se compone de componentes similares.
Los componentes como el kernel, la biblioteca de lenguaje C y los paquetes de tiempo de ejecución subyacentes se pueden configurar fácilmente a través de la herramienta de configuración
eCos y se pueden configurar fácilmente.
Bueno para satisfacer las necesidades de diferentes aplicaciones integradas. En términos de trasplante,
el
núcleo de eCos es pequeño, el código mínimo es de solo
10 KB
y el requerido
El espacio de datos es de solo
10 KB
de
RAM
y la portabilidad es buena, lo cual
es más fácil que
μClinux
y
μC/OS-II , pero
Su aplicación no es extensa y no hay tantos documentos como
μC/OS-II
, y es más adecuado para aplicaciones como la electrónica de consumo.
FreeRTOS
es un sistema operativo en tiempo real que es completamente gratuito y puede
ejecutarse en pequeños microcontroladores
RAM .
Funciones como desarrollo de código, gran portabilidad, adaptabilidad y estrategias de programación flexibles.
El sistema operativo FreeRTOS
puede completar
La gestión de tareas, la gestión del tiempo, el semáforo, la cola de mensajes, la gestión de la memoria, la grabación y otras funciones pueden cumplir con un mínimo
Requisitos básicos del sistema operativo. En términos de portabilidad,
FreeRTOS
se puede portar fácilmente a diferentes procesadores, como
ARM
,
MSP430
,
PIC
,
AVR
,
C8051F
, etc.,
el núcleo de
STM32 es
ARM , por lo que FreeRTOS
Es adecuado para el trasplante de este sistema y también es el sistema operativo integrado adoptado en este artículo.
2.5.2
Sistema de software
Un sistema de software consta de programas del sistema y programas de usuario. El programa del sistema es el programa solidificado en el chip de control.
El controlador se compone de un controlador principal y un módulo remoto. Hay
dos chips de control,
STM32
y
FPGA , en el controlador principal. Hay
5 tipos
Cada uno de los módulos remotos tiene un STM32
como chip de control
para realizar sus respectivas funciones , por lo que es necesario diseñar
7
conjuntos de diferentes
Programa del sistema, el lenguaje de programación incluye
el lenguaje C requerido por
STM32 y el lenguaje
Verilog HDL requerido por FPGA . usar
Edición de programas de usuario Este documento diseña dos conjuntos de soluciones, uno es diseñar un software de programación del lado
de la PC
, que se puede descargar a través del
puerto
USB .
Al flash en el controlador principal
STM32
, y el otro es la función de programación en el sitio, es decir, a través de la interfaz de interacción persona-computadora, usando
Las palabras clave permiten a los usuarios comunes sin conocimientos de programación escribir programas de prueba simples, lo cual es conveniente para la depuración en el sitio
[36][37]
.
2.5.3
Función modular
Este artículo diseña funciones modulares, control de movimiento y control de procesos. El control de movimiento se utiliza a menudo en maquinaria, máquinas herramienta, máquinas.
Robots, control de ascensores y otras ocasiones, utilizados para accionar motores paso a paso, servomotores o motores de CA, en este momento se requiere un controlador
Para generar señales de conducción correspondientes, como la conducción de motores de CA asíncronos, se requieren algoritmos
SPWM
y
SVPWM
para mover simultáneamente
El control a menudo utilizará el codificador para medir la velocidad y la posición. Este documento diseña la función del contador de números altos en el software. proceso
El control se utiliza a menudo en metalurgia, industria química, control de calderas, etc., para el control de circuito cerrado de cantidades analógicas como temperatura, presión y flujo.
Control, en este momento, el controlador necesita implementar el algoritmo
PID
.
2.5.4
Protocolo de comunicación
Cada fabricante
de PLC generalmente tiene su propio protocolo de comunicación, por ejemplo,
el PLC
de Rockwell
admite el protocolo DF1 .
Los PLC
de las
series
90-70
y
90-30 de
GE admiten el protocolo SNP , y los PLC de la serie Siemens S-200 admiten MPI y PPI
El PLC
Schneider
admite los protocolos
Modbus
y
Modbus Plus
,
el PLC Omron
admite
el protocolo
Host Link
Según el acuerdo, Mitsubishi
PLC
admite el protocolo
CC-Link
y Panasonic
PLC
admite el protocolo
MEWTOCOL-COM
. Entre ellos Modbus
No es sólo el protocolo de comunicación del
PLC
, también se utiliza en muchos instrumentos inteligentes y convertidores de frecuencia, y se ha utilizado en el campo del control industrial.
Ha sido ampliamente utilizado en el campo
[38]
. En este artículo, se selecciona
Modbus
como protocolo de datos para la comunicación entre el controlador principal y el módulo remoto.
En el protocolo mencionado anteriormente,
el
protocolo MEWTOCOL-COM es abierto y simple, este documento realiza algunos cambios en base a él.
Como
protocolo de datos para la comunicación entre
RMEN
y módulos
de E/S ,
más adelante se denominará protocolo RM-COM .
Symmet proporciona soluciones de control de movimiento STM32+FPGA.