ORB-SLAM2 소스 코드 분석(단안) - 참조 키 프레임 추적
1. 키프레임 추적 소개
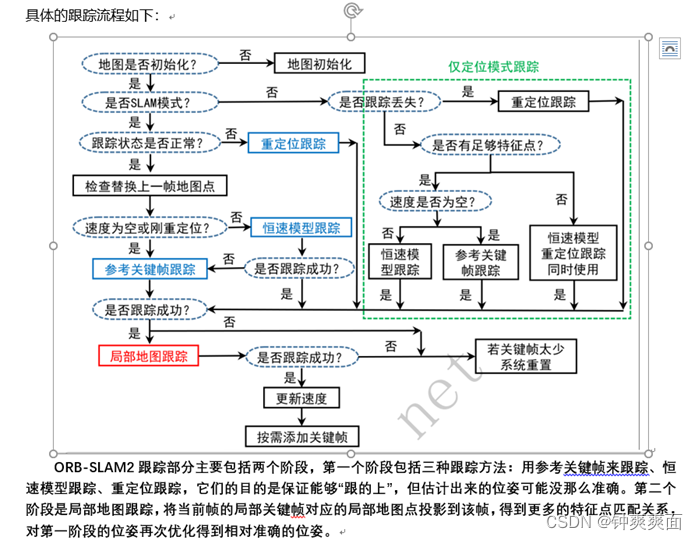
기준 키 프레임의 맵 포인트를 이용하여 현재 일반 프레임을 추적하는데,
속도 정보가 없을 때, 재배치 직후, 정속 모델 추적 실패 시 사용되며 대부분 사용하지 않습니다. 참조 프레임의 정보만 사용됩니다.
- 매칭 방식은 SearchByBoW로 현재 프레임의 특징점과 같은 노드 아래의 키 프레임을 매칭하고 프로젝션이 필요하지 않으며 매우 빠릅니다.
- 대략적인 포즈를 제공하기 위한 BA 최적화(포즈 최적화만)
등속 모델과 일치하는 특징점의 수가 적은 경우 최신 키 프레임과 일치시키기 위해 키 프레임 모드 추적이 선택됩니다. 빠른 매칭을 위해 BoW(Bag of Words)를 사용하여 매칭 속도를 높입니다.
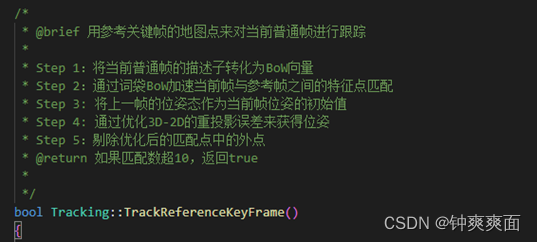
2. 현재 프레임의 특징점을 보우 벡터로 변환하고, 현재 프레임의 특징점과 이전 프레임의 키 프레임을 신속하게 일치시키기 위해 bag-of-words 매칭 방법을 사용합니다.

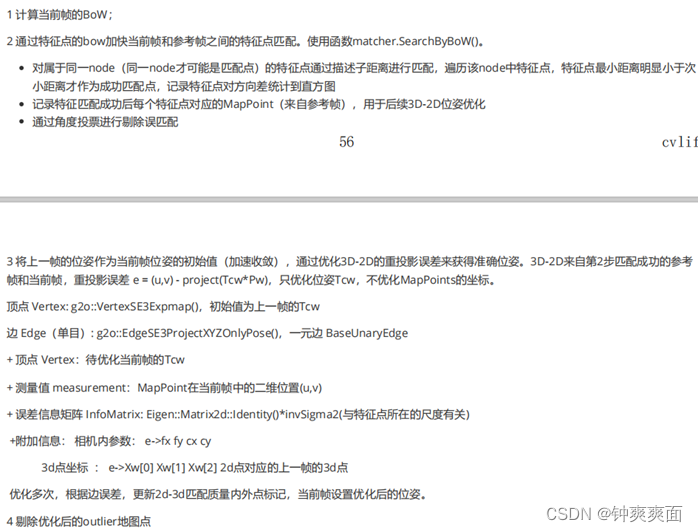
3. 이전 프레임의 비트 포즈를 현재 프레임 포즈의 초기값으로 사용

4. 3D-2D 재투영 오차를 최적화하여 포즈 획득
현재 프레임의 공통 시점 맵 포인트와 참조 키 프레임을 통해 3D-2D 재투영 오류를 통해(맵 포인트를 현재 픽셀 좌표계로 변환하고 현재 프레임의 특징점을 비교하여 오류 값을 얻음) , 현재 프레임의 포즈가 계산됩니다.최적화.

5. 최적화된 매칭 포인트에서 이상값 제거

포즈 최적화를 수행할 때 맵 포인트의 재투영 오류를 통해 일부 아웃라이어를 제거할 수 있지만 최적화 과정에서 표시만 되고 실제 삭제는 여기에서만 발생합니다.