개요
소스코드는 크게 세 부분으로 해석됩니다.
- 데이터 플레인, 데이터 로더 및 데이터 증대
- 네트워크 모델, 모델 세부 정보 및 논리
- 모델 훈련, 훈련 전략 등
데이터 소스의 해석
utils에 있으며 train.py에서 이 기능으로 이동할 수 있습니다.
train.py
# Trainloader 创建dataloader就是我们一开始讲的部分
dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect,
rank=rank, world_size=opt.world_size, workers=opt.workers)
- utils 폴더 아래의 datasets.py에는 다양한 유형의 데이터를 로드하는 기능이 포함되어 있습니다.
이미지 데이터 소스 구성
일괄
데이터 레이블 로드
데이터셋.py:
class LoadImagesAndLabels(Dataset): # for training/testing
def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
cache_images=False, single_cls=False, stride=32, pad=0.0, rank=-1):
try:
f = [] # image files
for p in path if isinstance(path, list) else [path]: #win和linux有点区别 所以这里面代码稍微处理的内容多了点
p = str(Path(p)) # os-agnostic
parent = str(Path(p).parent) + os.sep
if os.path.isfile(p): # file
with open(p, 'r') as t:
t = t.read().splitlines()
f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
elif os.path.isdir(p): # folder
f += glob.iglob(p + os.sep + '*.*')
else:
raise Exception('%s does not exist' % p)
self.img_files = sorted(
[x.replace('/', os.sep) for x in f if os.path.splitext(x)[-1].lower() in img_formats])
except Exception as e:
raise Exception('Error loading data from %s: %s\nSee %s' % (path, e, help_url))
n = len(self.img_files)
assert n > 0, 'No images found in %s. See %s' % (path, help_url)
bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index #batch索引
nb = bi[-1] + 1 # number of batches #一个epoch有多少个batch
self.n = n # number of images
self.batch = bi # batch index of image
self.img_size = img_size
self.augment = augment
self.hyp = hyp
self.image_weights = image_weights
self.rect = False if image_weights else rect
self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
self.mosaic_border = [-img_size // 2, -img_size // 2] #限定范围
self.stride = stride#下采样总值
# Define labels
sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
self.label_files = [x.replace(sa, sb, 1).replace(os.path.splitext(x)[-1], '.txt') for x in self.img_files]
# Check cache #可以设置缓存,再训练就不用一个个读了
cache_path = str(Path(self.label_files[0]).parent) + '.cache' # cached labels
if os.path.isfile(cache_path):
cache = torch.load(cache_path) # load
if cache['hash'] != get_hash(self.label_files + self.img_files): # dataset changed
cache = self.cache_labels(cache_path) # re-cache
else:
cache = self.cache_labels(cache_path) # cache
# Get labels
labels, shapes = zip(*[cache[x] for x in self.img_files])
self.shapes = np.array(shapes, dtype=np.float64)
self.labels = list(labels)
# Rectangular Training https://github.com/ultralytics/yolov3/issues/232
if self.rect: #矩形
# Sort by aspect ratio
s = self.shapes # wh
ar = s[:, 1] / s[:, 0] # aspect ratio
irect = ar.argsort()
self.img_files = [self.img_files[i] for i in irect]
self.label_files = [self.label_files[i] for i in irect]
self.labels = [self.labels[i] for i in irect]
self.shapes = s[irect] # wh
ar = ar[irect]
# Set training image shapes
shapes = [[1, 1]] * nb
for i in range(nb):
ari = ar[bi == i]
mini, maxi = ari.min(), ari.max()
if maxi < 1:
shapes[i] = [maxi, 1]
elif mini > 1:
shapes[i] = [1, 1 / mini]
self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
# Cache labels
create_datasubset, extract_bounding_boxes, labels_loaded = False, False, False
nm, nf, ne, ns, nd = 0, 0, 0, 0, 0 # number missing, found, empty, datasubset, duplicate
pbar = enumerate(self.label_files)
if rank in [-1, 0]:
pbar = tqdm(pbar)
for i, file in pbar:
l = self.labels[i] # label
if l is not None and l.shape[0]:
assert l.shape[1] == 5, '> 5 label columns: %s' % file #5列是否都有
assert (l >= 0).all(), 'negative labels: %s' % file #标签值是否大于0
assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels: %s' % file #归一化
if np.unique(l, axis=0).shape[0] < l.shape[0]: # duplicate rows 计算重复的
nd += 1 # print('WARNING: duplicate rows in %s' % self.label_files[i]) # duplicate rows
if single_cls:
l[:, 0] = 0 # force dataset into single-class mode 单个类别,设置其类别为0
self.labels[i] = l
nf += 1 # file found
# Create subdataset (a smaller dataset)
if create_datasubset and ns < 1E4:
if ns == 0:
create_folder(path='./datasubset')
os.makedirs('./datasubset/images')
exclude_classes = 43
if exclude_classes not in l[:, 0]:
ns += 1
# shutil.copy(src=self.img_files[i], dst='./datasubset/images/') # copy image
with open('./datasubset/images.txt', 'a') as f:
f.write(self.img_files[i] + '\n')
# Extract object detection boxes for a second stage classifier 把那个坐标框里面的数据截出来,看你任务需要
if extract_bounding_boxes:
p = Path(self.img_files[i])
img = cv2.imread(str(p))
h, w = img.shape[:2]
for j, x in enumerate(l):
f = '%s%sclassifier%s%g_%g_%s' % (p.parent.parent, os.sep, os.sep, x[0], j, p.name)
if not os.path.exists(Path(f).parent):
os.makedirs(Path(f).parent) # make new output folder
b = x[1:] * [w, h, w, h] # box
b[2:] = b[2:].max() # rectangle to square
b[2:] = b[2:] * 1.3 + 30 # pad
b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
assert cv2.imwrite(f, img[b[1]:b[3], b[0]:b[2]]), 'Failure extracting classifier boxes'
else:
ne += 1 # print('empty labels for image %s' % self.img_files[i]) # file empty
# os.system("rm '%s' '%s'" % (self.img_files[i], self.label_files[i])) # remove
if rank in [-1, 0]:
pbar.desc = 'Scanning labels %s (%g found, %g missing, %g empty, %g duplicate, for %g images)' % (
cache_path, nf, nm, ne, nd, n)
if nf == 0:
s = 'WARNING: No labels found in %s. See %s' % (os.path.dirname(file) + os.sep, help_url)
print(s)
assert not augment, '%s. Can not train without labels.' % s
# Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
self.imgs = [None] * n
if cache_images:
gb = 0 # Gigabytes of cached images
pbar = tqdm(range(len(self.img_files)), desc='Caching images')
self.img_hw0, self.img_hw = [None] * n, [None] * n
for i in pbar: # max 10k images
self.imgs[i], self.img_hw0[i], self.img_hw[i] = load_image(self, i) # img, hw_original, hw_resized
gb += self.imgs[i].nbytes
pbar.desc = 'Caching images (%.1fGB)' % (gb / 1E9)
def cache_labels(self, path='labels.cache'):
# Cache dataset labels, check images and read shapes
x = {
} # dict
pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
for (img, label) in pbar:
try:
l = []
image = Image.open(img)
image.verify() # PIL verify
# _ = io.imread(img) # skimage verify (from skimage import io)
shape = exif_size(image) # image size
assert (shape[0] > 9) & (shape[1] > 9), 'image size <10 pixels'
if os.path.isfile(label):
with open(label, 'r') as f:
l = np.array([x.split() for x in f.read().splitlines()], dtype=np.float32) # labels
if len(l) == 0:
l = np.zeros((0, 5), dtype=np.float32)
x[img] = [l, shape]
except Exception as e:
x[img] = [None, None]
print('WARNING: %s: %s' % (img, e))
x['hash'] = get_hash(self.label_files + self.img_files)
torch.save(x, path) # save for next time
return x
- 1.cache에는 캐시 기능이 있으며 캐시를 설정할 수 있으며 학습 후 하나씩 읽을 필요가 없습니다.
-
- extract_bounding_boxes, 후속 처리를 위해 상자의 콘텐츠를 추출하려면 이 매개변수를 True로 설정합니다.
create_datasubset, extract_bounding_boxes, labels_loaded = False, False, False # 如有要将信息暴露或者提取出来的,可以在这边修改成True
-
- nm, nf, ne, ns, nd = 0, 0, 0, 0, 0 # number missing, found, empty, datasubset, duplicate # 필요한 경우 이 변수를 추출합니다.
- 좋다:

모자이크 데이터 증대
위에서 데이터를 가져오는 방법(dataloader)을 설명한 다음 가져온 데이터를 향상시키는 방법을 소개합니다.
datasts.py에서:
데이터 포인원
def load_mosaic(self, index):
# loads images in a mosaic
labels4 = [] # 将4张图合成为1张
s = self.img_size
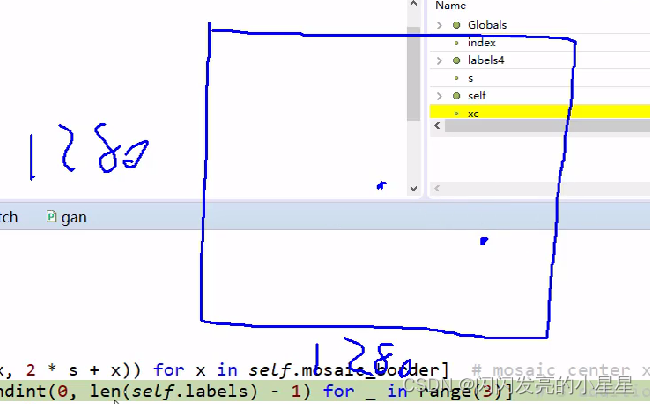
yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y 随机设置合成的一张大图的中心 ,函数中的x为负数? 如x=-320,s=640,则中心点的范围是 320,2*640-320
indices = [index] + [random.randint(0, len(self.labels) - 1) for _ in range(3)] # 3 additional image indices 随机再选3个图像
for i, index in enumerate(indices):
# Load image
img, _, (h, w) = load_image(self, index)
# place img in img4
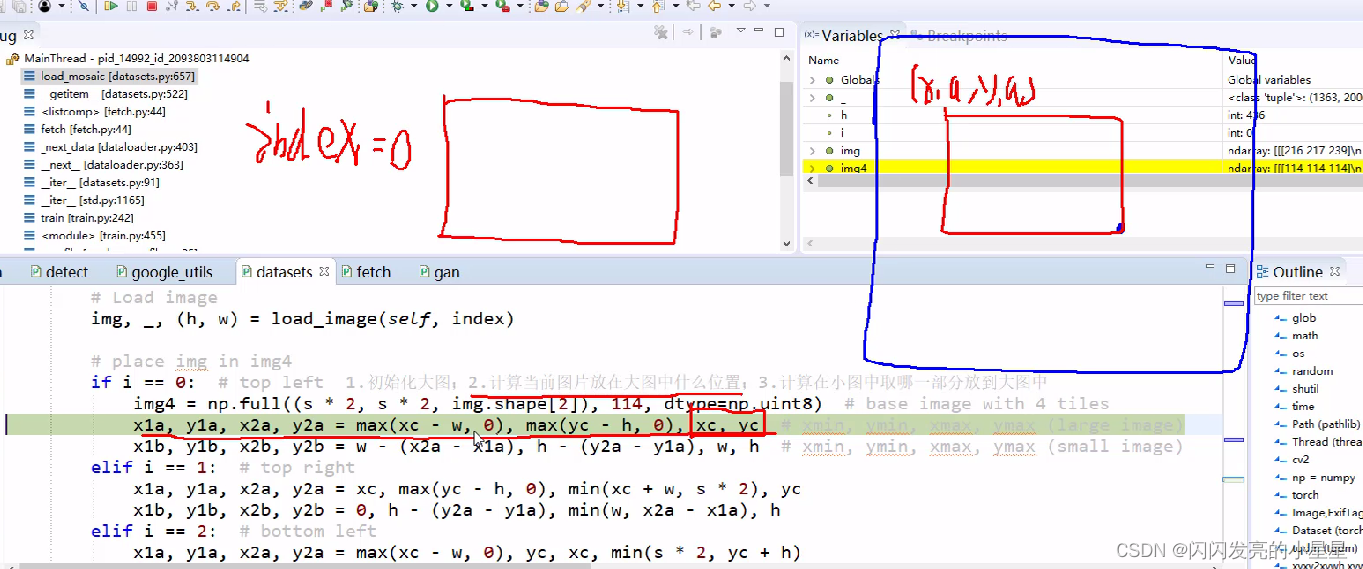
if i == 0: # top left 1.初始化大图;2.计算当前图片放在大图中什么位置;3.计算在小图中取哪一部分放到大图中
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
elif i == 1: # top right
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
elif i == 2: # bottom left
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
elif i == 3: # bottom right
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
#1.截图小图中的部分放到大图中 2.由于小图可能填充不满,所以还需要计算差异值,因为一会要更新坐标框标签
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
padw = x1a - x1b
padh = y1a - y1b
# Labels 标签值要重新计算,因为现在都放到大图中了
x = self.labels[index]
labels = x.copy()
if x.size > 0: # Normalized xywh to pixel xyxy format
labels[:, 1] = w * (x[:, 1] - x[:, 3] / 2) + padw
labels[:, 2] = h * (x[:, 2] - x[:, 4] / 2) + padh
labels[:, 3] = w * (x[:, 1] + x[:, 3] / 2) + padw
labels[:, 4] = h * (x[:, 2] + x[:, 4] / 2) + padh
labels4.append(labels)
# Concat/clip labels 坐标计算完之后可能越界,调整坐标值,让他们都在大图中
if len(labels4):
labels4 = np.concatenate(labels4, 0)
np.clip(labels4[:, 1:], 0, 2 * s, out=labels4[:, 1:]) # use with random_perspective
# img4, labels4 = replicate(img4, labels4) # replicate
# Augment 对整合的大图再进行随机旋转、平移、缩放、裁剪
img4, labels4 = random_perspective(img4, labels4,
degrees=self.hyp['degrees'],
translate=self.hyp['translate'],
scale=self.hyp['scale'],
shear=self.hyp['shear'],
perspective=self.hyp['perspective'],
border=self.mosaic_border) # border to remove
return img4, labels4
- 1. 4장의 사진을 연결하여 큰 사진을 합성합니다. 큰 사진의 중심점은 다음과 같이 무작위입니다.
-
- a. 큰 이미지 초기화 b. 현재 이미지가 큰 이미지에 배치되는 위치 계산 c. 작은 이미지에서 어느 부분을 가져와서 큰 이미지에 배치할지 계산
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
-
- 큰 그림에서 각각의 작은 그림의 위치
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
-
- 4개의 작은 이미지를 하나의 큰 이미지로 결합한 후 큰 이미지에 대해 회전, 변환 및 반전과 같은 데이터 향상 작업을 수행합니다.
getitem 빌드 배치
배치가 16이면 getitem이 16번 실행되고 각 이미지는 주로 모자이크 데이터 향상을 위해 한 번 전처리됩니다.
def __getitem__(self, index):
if self.image_weights:
index = self.indices[index]
hyp = self.hyp
mosaic = self.mosaic and random.random() < hyp['mosaic']
if mosaic:
# Load mosaic
img, labels = load_mosaic(self, index)
shapes = None
# MixUp https://arxiv.org/pdf/1710.09412.pdf
if random.random() < hyp['mixup']:
img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
img = (img * r + img2 * (1 - r)).astype(np.uint8)
labels = np.concatenate((labels, labels2), 0)
else:
# Load image
img, (h0, w0), (h, w) = load_image(self, index)
# Letterbox
shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
# Load labels
labels = []
x = self.labels[index]
if x.size > 0:
# Normalized xywh to pixel xyxy format
labels = x.copy()
labels[:, 1] = ratio[0] * w * (x[:, 1] - x[:, 3] / 2) + pad[0] # pad width
labels[:, 2] = ratio[1] * h * (x[:, 2] - x[:, 4] / 2) + pad[1] # pad height
labels[:, 3] = ratio[0] * w * (x[:, 1] + x[:, 3] / 2) + pad[0]
labels[:, 4] = ratio[1] * h * (x[:, 2] + x[:, 4] / 2) + pad[1]
if self.augment:
# Augment imagespace
if not mosaic: #这个之前在mosaic方法最后做过了
img, labels = random_perspective(img, labels,
degrees=hyp['degrees'],
translate=hyp['translate'],
scale=hyp['scale'],
shear=hyp['shear'],
perspective=hyp['perspective'])
# Augment colorspace h:色调 s:饱和度 V:亮度
augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
# Apply cutouts
# if random.random() < 0.9:
# labels = cutout(img, labels)
nL = len(labels) # number of labels
if nL: #1.调整标签格式 2.归一化标签取值范围
labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
if self.augment:#要不要做翻转操作
# flip up-down
if random.random() < hyp['flipud']:
img = np.flipud(img)
if nL:
labels[:, 2] = 1 - labels[:, 2]
# flip left-right
if random.random() < hyp['fliplr']:
img = np.fliplr(img)
if nL:
labels[:, 1] = 1 - labels[:, 1]
labels_out = torch.zeros((nL, 6))
if nL:
labels_out[:, 1:] = torch.from_numpy(labels)
# Convert
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416 要满足pytorch的格式
img = np.ascontiguousarray(img)
return torch.from_numpy(img), labels_out, self.img_files[index], shapes
네트워크 아키텍처 다이어그램용 시각적 설치 도구
넷론 웹 버전을 사용하면 pt 형식의 모델에 친숙하지 않고 아래 그림과 같이 각 네트워크 간의 관계를 표시할 수 없습니다. pt 형식을 onnx 형식으로 변환하는 것이 좋습니다. 먼저 onnx를 설치한 다음 onnx 파일을 변환합니다. 이 단계는 원래 코드에 제공됩니다(models 폴더에 export.py가 있음).
태평양 표준시:
onnx:
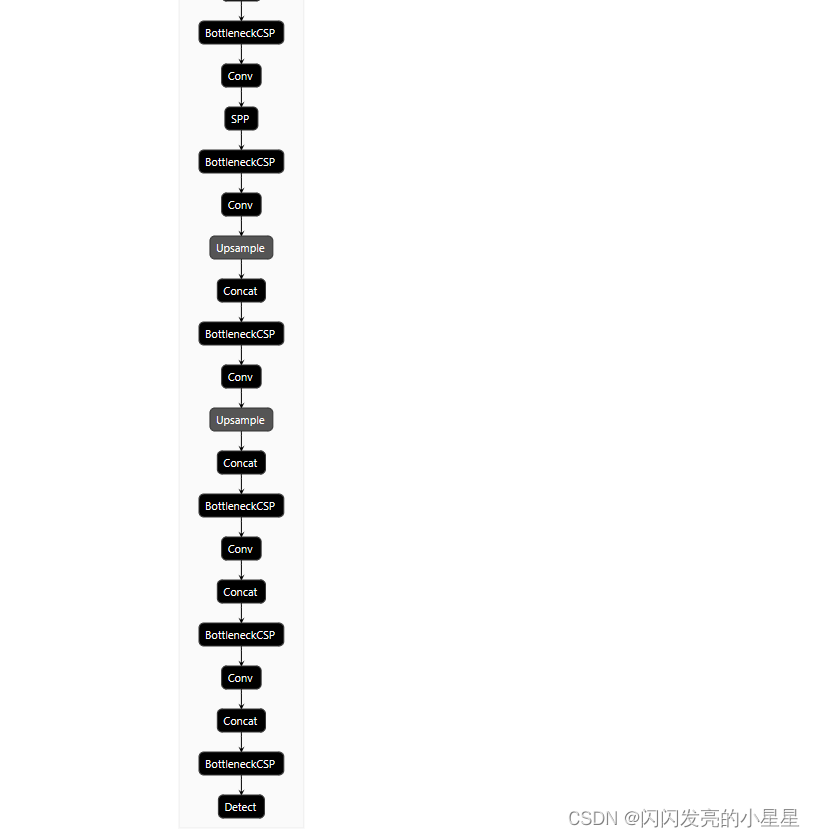
V5 네트워크 구성 파일 해석
yolov5s.yaml과 같은 다양한 유형의 모델이 모델 폴더에 저장됩니다 .
# parameters
nc: 2 # number of classes
depth_multiple: 0.33 # model depth multiple 模型深度,及比如后面设置网络有9层,但实际只用9*0.33=3个
width_multiple: 0.50 # layer channel multiple 调整卷积核的个数,如设计[64,3],实际用64*0.5 =32 个卷积核
# anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 backbone 特征提取模块
backbone:
# [from, number, module, args] -1代表输入上一层的输出,number代表重复次数,Focus:网络类型,[64,3],卷积核的个数和channel 通道数
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, BottleneckCSP, [128]], # 3 代表重复3次,跟上面的depth_width联系的话,其实最终只做了,3*0.33=1次.
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, BottleneckCSP, [256]], # 9代表重复9次,跟上面的depth_width联系的话,其实最终只做了,9*0.33=3次.
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, BottleneckCSP, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
[-1, 3, BottleneckCSP, [1024, False]], # 9
]
# YOLOv5 head 输出
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, BottleneckCSP, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
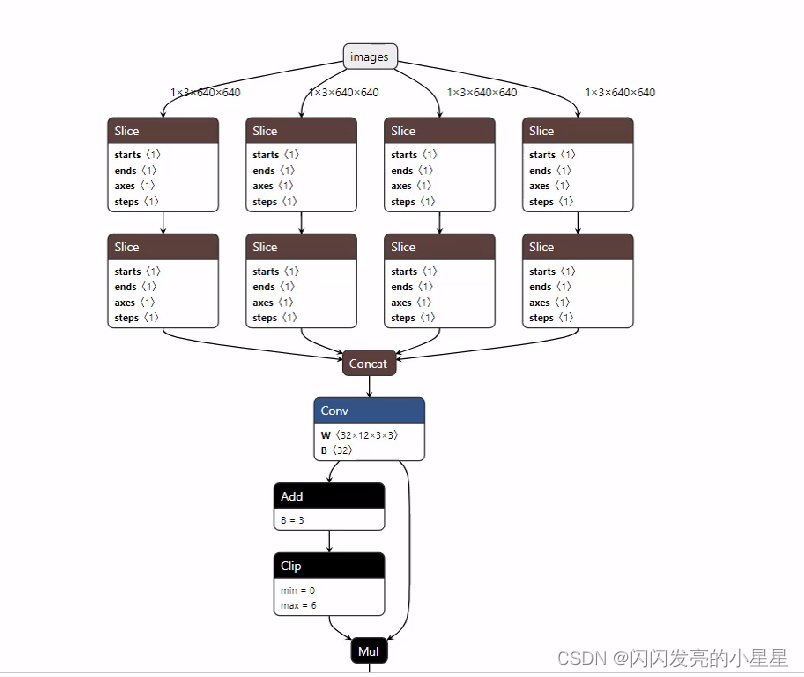
포커스 모듈
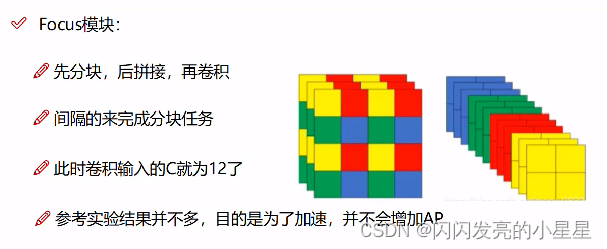
블록으로 나누기: 점프하고 나누기. 예를 들어 그림의 빨강, 노랑, 파랑, 초록을 점프로 나눈 다음 이어붙여 12개의 채널을 형성하여 2 2 12를 형성 합니다 .
하이퍼파라미터의 해석
이 파일에는 일반적으로 변경할 필요가 없는 초기화 구성 매개변수가 있습니다.
# Hyperparameters for COCO training from scratch
# python train.py --batch 40 --cfg yolov5m.yaml --weights '' --data coco.yaml --img 640 --epochs 300
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.2 # final OneCycleLR learning rate (lr0 * lrf) 余弦退火,使用余弦函数动态降低学习率
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4 权重衰减,加入正则之后权重就不会变化剧烈
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.5 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 1.0 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 0 # anchors per output grid (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.5 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.0 # image mixup (probability)
명령줄 매개변수
시작부터 포기까지.
학습에 직접 사용할 수 있지만 모델을 이해하기 위해 잠시 보류해 두겠습니다. . . . .