대상 탐지 알고리즘은 일반적으로 영역 기반 알고리즘과 회귀 기반 알고리즘 으로 나뉩니다.
1) 지역 기반 알고리즘: RCNN, Fast RCNN, Faster RCNN , Mask RCNN 등 전체 감지 프로세스는 두 단계로 나뉩니다. 첫 번째 단계에서 검출기는 일부 가상 영역(ROI)을 찾아야 하고, 두 번째 단계에서는 검출기가 이러한 가상 영역에서 분류 및 위치 회귀(경계 상자 회귀)를 수행해야 합니다.
2) 회귀 기반 알고리즘: YOLO 시리즈 등 탐지는 개체의 범주와 위치를 직접 회귀하는 종단 간 프로세스입니다.
SSD(Single Shot MultiBox Detector)는 1단계 감지 알고리즘입니다. Faster RCNN과 YOLO의 조합으로 간주할 수 있습니다. 회귀 기반 모델(YOLO와 유사)을 사용하여 네트워크에서 개체의 범주와 위치를 직접 반환하므로 탐지 속도가 매우 빠릅니다. 동시에 영역 기반 개념(Faster RCNN과 유사)도 사용되며, 탐지 과정에서 많은 후보 영역이 ROI로 사용됩니다.
더 빠른 RCNN 검토:
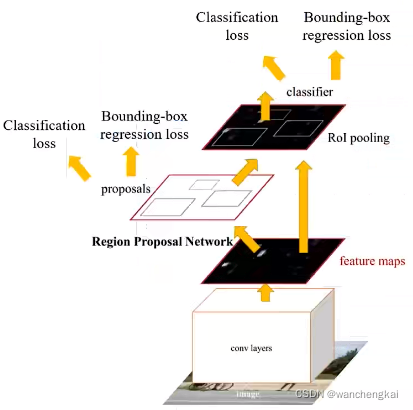
더 빠른 RCNN의 문제점:
1) 작은 대상에 대한 탐지 효과가 매우 낮습니다(예측은 하나의 피처 레이어에서만 수행됩니다. 이 피처 레이어는 많은 컨볼루션 레이어를 통과했습니다. 더 많이 통과할수록 추상화 수준이 높을수록 이미지의 세부 정보가 적습니다. 유지되고, 작은 목표는 효과가 나쁠수록 상대적으로 낮은 수준에서 특징을 예측할 필요가 있음)
2) 모델이 크고 검출 속도가 느리다(2개의 예측, 2단계 방법의 공통적인 문제)
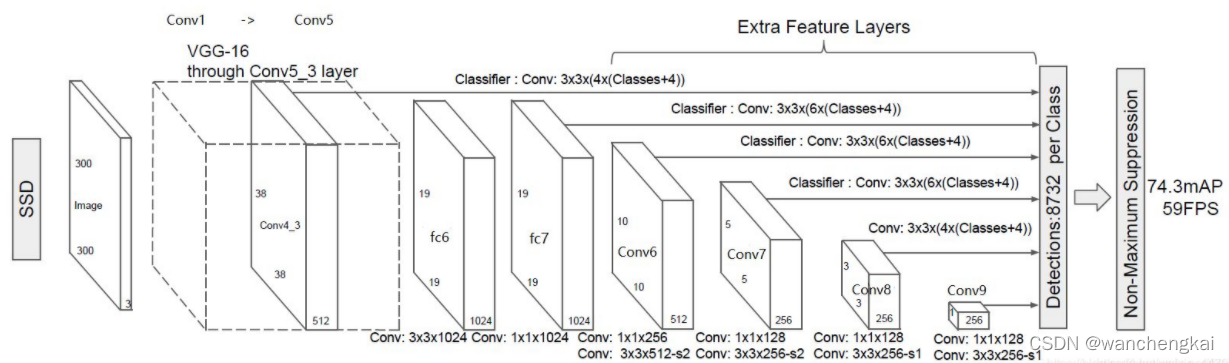
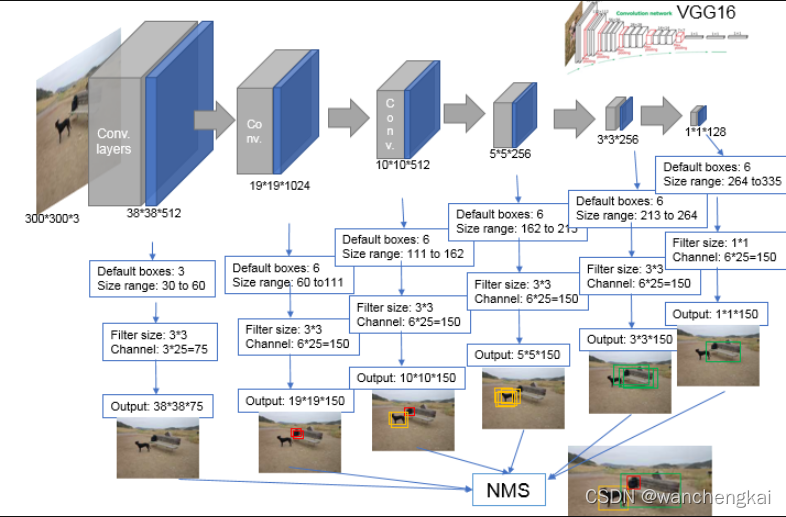
SSD 네트워크
다양한 피처 스케일에서 다양한 스케일의 객체 예측
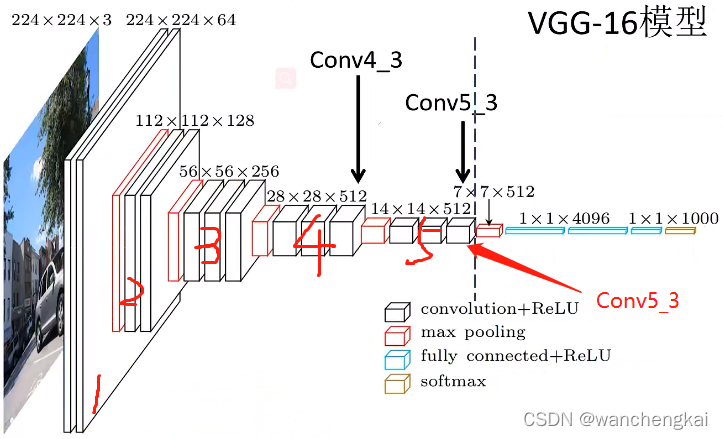
백본 네트워크:
SSD의 백본 네트워크는 전통적인 이미지 분류 네트워크를 기반으로 하며 vgg16 네트워크의 일부가 기본 네트워크로 사용됩니다. 그림과 같이 10개의 컨볼루션 레이어(conv 레이어)와 3개의 풀링 레이어(max pooling)를 처리하면 38×38×512 크기의 피처 맵(Conv4_3 피처 맵)을 얻을 수 있습니다. 다음 단계에서는 이 기능 맵에서 회귀를 수행하여 개체의 위치와 범주를 가져와야 합니다.
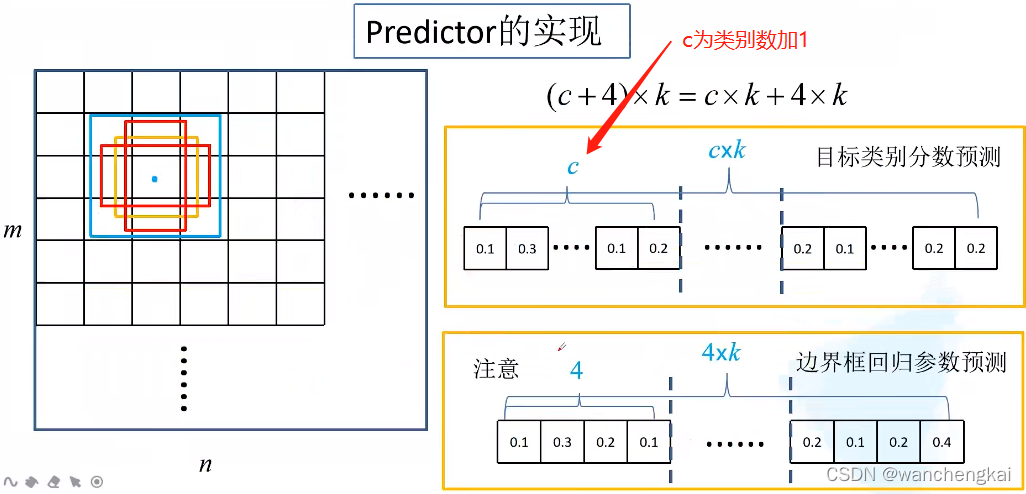
회귀:
YOLO의 회귀 연산과 유사하게 먼저 특징 맵의 각 위치에 하나의 후보 상자(기본 상자)만 있는 경우를 고려합니다.
1) 위치 회귀: 검출기는 사진 크기의 너비와 높이(w, h)에 상대적인 프레임 중심 오프셋(cx, cy)을 제공해야 하며 총 4개의 매개변수가 반환되어야 합니다. (빠른 RCNN은 총 (N+1)*4 매개변수가 있는 각 범주에 대한 회귀 상자가 필요합니다.)
2) 분류: 각 경계 상자에 대해 20개의 범주 + 1개의 배경 범주의 점수를 제공해야 합니다.
각 위치에 대해 감지된 개체의 위치 및 범주 정보를 저장하기 위해 25차원 벡터가 필요합니다. 38×38 기능 맵의 경우 이 정보를 저장하려면 38×38×25 크기의 공간이 필요합니다. 따라서 검출기는 특징 맵(38×38×512)에서 검출 결과(38×38×25)까지의 매핑 관계를 학습해야 합니다. 이 변환 단계는 컨볼루션 연산을 사용합니다. 25개의 3×3 컨볼루션 커널을 사용하여 기능 맵을 컨벌루션합니다. 지금까지 각 위치에서 상자를 회귀시키는 작업을 완료했습니다.
3) 다중 후보 상자: SSD는 각 위치에서 서로 다른 크기를 기반으로 k개의 상자를 반환하기를 희망합니다. 따라서 이러한 상자의 회귀 및 분류 정보를 저장하려면 각 위치에 25×k 차원 공간이 필요하므로 컨볼루션 연산은 38×38×25k 차원 테스트를 얻기 위해 25×k 3×3 컨볼루션 커널을 사용하게 됩니다. 결과 지도(점수 지도).
4) 다중 특징 맵: 신경망의 경우 얕은 특징 맵은 더 자세한 정보를 포함하고 작은 물체 감지에 더 적합하며, 깊은 특징 맵은 더 많은 글로벌 정보를 포함하고 큰 물체 물체 감지에 더 적합합니다. 따라서 서로 다른 특징 맵에서 서로 다른 크기의 후보 상자를 회귀함으로써 서로 다른 크기의 개체에 대해 더 나은 탐지 결과를 얻을 수 있습니다.
SSD 의 감지 정확도와 속도는 76.8 mAP 및 22FPS 로 Faster RCNN 및 YOLO를 능가 합니다 .