Overview
-
Deep learning is a vast field, but most of us face some common difficulties when building models -
Here, we will discuss 4 challenges and tips to improve the performance of deep learning models -
This is a code-practice focused article, so get your Python IDE ready and improve your deep learning models!
introduce
I've spent most of the last two years working pretty much in the field of deep learning. It was a great experience and I worked on several projects related to image and video data.
Until then, I was on the fringe, and I shied away from deep learning concepts like object detection and face recognition. It was not until the end of 2017 that in-depth research began. During this time, I encountered various problems. I want to talk about four of the most common problems that most deep learning practitioners and enthusiasts encounter during their journey.
Table of contents
-
Common problems with deep learning models -
Vehicle Classification Case Study Overview -
Learn about each pain point and how to overcome it to improve the performance of your deep learning models -
Case study: Improving the performance of our vehicle classification model
Common problems with deep learning models
Deep learning models generally perform very well on most data. When it comes to image data, deep learning models, especially convolutional neural networks (CNN), outperform almost all other models.
My usual approach is to use CNN models when encountering image related projects (such as image classification projects).
This approach works well, but there are situations where CNN or other deep learning models fail to perform. I've encountered this a few times. My data is fine, the model's architecture is defined correctly, and the loss function and optimizer are set up correctly, but my model doesn't perform as well as I expected.
This is a common dilemma most of us face when working with deep learning models.
As mentioned above, I will address four such puzzles:
-
Lack of data available for training -
overfitting -
Underfitting -
Long training time
Before we dive into and understand these challenges, let’s take a quick look at the case study we’ll address in this article.
Vehicle Classification Case Study Overview
This article is part of a series I’ve been writing about PyTorch for Beginners. You can check out the first three articles here (we'll quote some from there):
- Getting Started with PyTorch
- Build an image classification model using convolutional neural networks in PyTorch
- Transfer learning with PyTorc
We will continue reading the case study we saw in the previous article. The purpose here is to classify vehicle images as urgent or non-urgent.
First, let's quickly build a CNN model and use it as a baseline. We will also try to improve the performance of this model. The steps are very simple and we have already seen them several times in previous articles.
So I won't go into every step here. Instead, we'll focus on the code, which you can always examine in more detail in the previous article I linked above.
You can get the dataset from here : https://drive.google.com/file/d/1EbVifjP0FQkyB1axb7KQ26yPtWmneApJ/view
Here is the complete code to build a CNN model for our vehicle classification project.
Import library
- #Import library
- import pandas as pd
- import numpy as np
- from tqdm import tqdm
- # Used to read and display images
- from skimage.io import imread
- from skimage.transform import resize
- import matplotlib.pyplot as plt
- %matplotlib inline
- # Used to create a validation set
- from sklearn.model_selection import train_test_split
- # Used to evaluate the model
- from sklearn.metrics import accuracy_score
- # PyTorch libraries and modules
- import torch
- from torch.autograd import Variable
- from torch.nn import Linear, ReLU, CrossEntropyLoss, Sequential, Conv2d, MaxPool2d, Module, Softmax, BatchNorm2d, Dropout
- from torch.optim import Adam, SGD
- # Pre-trained model
- from torchvision import models
Load dataset
- #Load the dataset
- train = pd.read_csv(‘emergency_train.csv’)
- # Load training images
- train_img = []
- for img_name in tqdm(train[‘image_names’]):
- #Define image path
- image_path = ‘…/Hack Session/images/’ + img_name
- # Read pictures
- img = imread(image_path)
- # Standardize pixel values
- img = img/255
- img = resize(img, output_shape=(224,224,3), mode=‘constant’, anti_aliasing=True)
- # Convert to floating point number
- img = img.astype(‘float32’)
- #Add image to list
- train_img.append(img)
- #Convert to numpy array
- train_x = np.array(train_img)
- train_x.shape

Create training and validation sets
- # Define goals
- train_y = train[‘emergency_or_not’].values
- #Create validation set
- train_x, val_x, train_y, val_y = train_test_split(train_x, train_y, test_size = 0.1, random_state = 13, stratify=train_y)
- (train_x.shape, train_y.shape), (val_x.shape, val_y.shape)

Convert image to torch format
- # Convert training images to torch format
- train_x = train_x.reshape(1481, 3, 224, 224)
- train_x = torch.from_numpy(train_x)
- # Convert target to torch format
- train_y = train_y.astype(int)
- train_y = torch.from_numpy(train_y)
- # Convert verification image to torch format
- val_x = val_x.reshape(165, 3, 224, 224)
- val_x = torch.from_numpy(val_x)
- # Convert target to torch format
- val_y = val_y.astype(int)
- val_y = torch.from_numpy(val_y)
Define model architecture
- torch.manual_seed(0)
- class Net(Module):
- def init ( self ):
- super(Net, self).init()
- self.cnn_layers = Sequential(
- # Define 2D convolution layer
- Conv2d(3, 16, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- MaxPool2d(kernel_size=2, stride=2),
- # Another 2D convolutional layer
- Conv2d(16, 32, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- MaxPool2d(kernel_size=2, stride=2)
- )
- self.linear_layers = Sequential(
- Linear(32 56 56, 2)
- )
- # Propagation of the previous item
- def forward(self, x):
- x = self.cnn_layers(x)
- x = x.view(x.size(0), -1)
- x = self.linear_layers(x)
- return x
Define model parameters
- # Define model
- model = Net()
- #Define optimizer
- optimizer = Adam(model.parameters(), lr=0.0001)
- # Define loss function
- criterion = CrossEntropyLoss()
- # Check if GPU is available
- if torch.cuda.is_available():
- model = model.cuda()
- criterion = criterion.cuda()
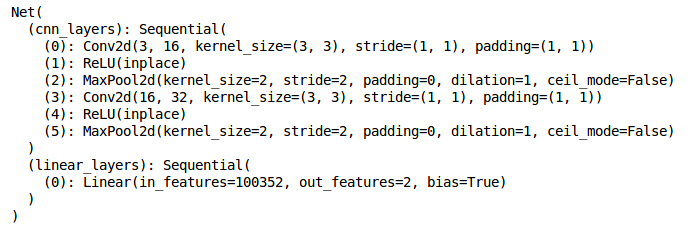
- print(model)
Training model
- torch.manual_seed(0)
- # Model batch size
- batch_size = 128
- # epoch number
- n_epochs = 25
- for epoch in range(1, n_epochs+1):
- # Keep records of training and validation set losses
- train_loss = 0.0
- permutation = torch.randperm(train_x.size()[0])
- training_loss = []
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- optimizer.zero_grad()
- outputs = model(batch_x)
- loss = criterion(outputs,batch_y)
- training_loss.append(loss.item())
- loss.backward()
- optimizer.step()
- training_loss = np.average(training_loss)
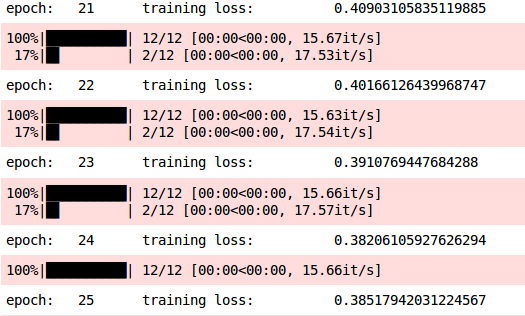
- print(‘epoch: \t’, epoch, ‘\t training loss: \t’, training_loss)
Prediction on training set
- #Training set prediction
- prediction = []
- target = []
- permutation = torch.randperm(train_x.size()[0])
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction.append(predictions)
- target.append(batch_y)
- # Training set accuracy
- accuracy = []
- for i in range(len(prediction)):
- accuracy.append(accuracy_score(target[i],prediction[i]))
- print(‘training accuracy: \t’, np.average(accuracy))

Prediction on validation set
- # Validation set prediction
- prediction_val = []
- target_val = []
- permutation = torch.randperm(val_x.size()[0])
- for i in tqdm(range(0,val_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = val_x[indices], val_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction_val.append(predictions)
- target_val.append(batch_y)
- # Validation set accuracy
- accuracy_val = []
- for i in range(len(prediction_val)):
- accuracy_val.append(accuracy_score(target_val[i],prediction_val[i]))
- print(‘validation accuracy: \t’, np.average(accuracy_val))

Deep learning problems
Deep Learning Dilemma 1: Lack of Available Data to Train Our Models
Data augmentation is the process of generating new data or adding data to train a model without actually collecting the new data.
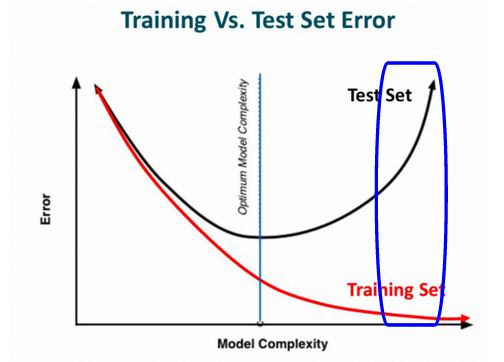
Deep Learning Conundrum #2: Model Overfitting
A model is considered overfitting when it performs very well on the training set, but performance degrades on the validation set (or unseen data).
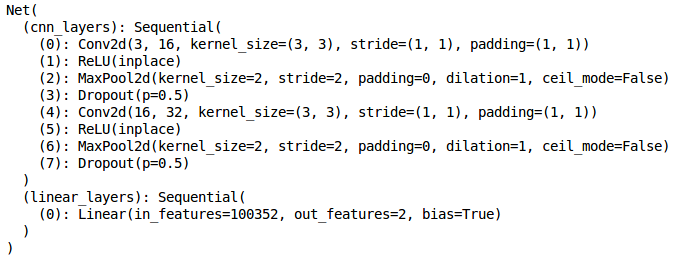
Model architecture
- torch.manual_seed(0)
- class Net(Module):
- def init ( self ):
- super(Net, self).init()
- self.cnn_layers = Sequential(
- # Define 2D convolution layer
- Conv2d(3, 16, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- MaxPool2d(kernel_size=2, stride=2),
- # Dropout layer
- Dropout(),
- #Another 2D convolutional layer
- Conv2d(16, 32, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- MaxPool2d(kernel_size=2, stride=2),
- # Dropout layer
- Dropout(),
- )
- self.linear_layers = Sequential(
- Linear(32 56 56, 2)
- )
- # forward propagation
- def forward(self, x):
- x = self.cnn_layers(x)
- x = x.view(x.size(0), -1)
- x = self.linear_layers(x)
- return x
Model parameters
- # Define model
- model = Net()
- #Define optimizer
- optimizer = Adam(model.parameters(), lr=0.0001)
- # Define loss function
- criterion = CrossEntropyLoss()
- # Check if GPU is available
- if torch.cuda.is_available():
- model = model.cuda()
- criterion = criterion.cuda()
- print(model)
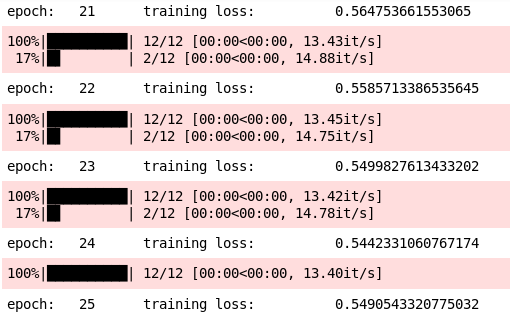
Training model
- torch.manual_seed(0)
- # Model batch size
- batch_size = 128
- # epoch number
- n_epochs = 25
- for epoch in range(1, n_epochs+1):
- # Keep records of training and validation set losses
- train_loss = 0.0
- permutation = torch.randperm(train_x.size()[0])
- training_loss = []
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- optimizer.zero_grad()
- outputs = model(batch_x)
- loss = criterion(outputs,batch_y)
- training_loss.append(loss.item())
- loss.backward()
- optimizer.step()
- training_loss = np.average(training_loss)
- print(‘epoch: \t’, epoch, ‘\t training loss: \t’, training_loss)
Check model performance
- #
- prediction = []
- target = []
- permutation = torch.randperm(train_x.size()[0])
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction.append(predictions)
- target.append(batch_y)
- # Training set accuracy
- accuracy = []
- for i in range(len(prediction)):
- accuracy.append(accuracy_score(target[i],prediction[i]))
- print(‘training accuracy: \t’, np.average(accuracy))

Again, let's check the validation set accuracy:
- # Validation set prediction
- prediction_val = []
- target_val = []
- permutation = torch.randperm(val_x.size()[0])
- for i in tqdm(range(0,val_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = val_x[indices], val_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction_val.append(predictions)
- target_val.append(batch_y)
- # Validation set accuracy
- accuracy_val = []
- for i in range(len(prediction_val)):
- accuracy_val.append(accuracy_score(target_val[i],prediction_val[i]))
- print(‘validation accuracy: \t’, np.average(accuracy_val))

Let's compare this with previous results:
| Training set accuracy | Validation set accuracy | |
|---|---|---|
| No Dropout | 87.80 | 69.72 |
| There is Dropout | 73.56 | 70.29 |
Deep learning problem 3: Model underfitting
Underfitting is when the model is unable to learn patterns from the training data itself, and therefore performs lower on the training set.
-
Add training data -
Make a complex model -
Increase training epochs
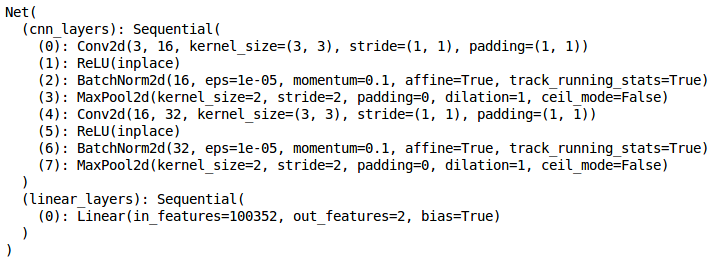
Deep learning problem 4: Training takes too long
To overcome this problem, we can apply batch normalization, where we normalize the activations of the hidden layers and try to make the same distribution.
- torch.manual_seed(0)
- class Net(Module):
- def init ( self ):
- super(Net, self).init()
- self.cnn_layers = Sequential(
- # Define 2D convolution layer
- Conv2d(3, 16, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- # BN layer
- BatchNorm2d ( 16 ),
- MaxPool2d(kernel_size=2, stride=2),
- #Another 2D convolutional layer
- Conv2d(16, 32, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- # BN layer
- BatchNorm2d ( 32 ),
- MaxPool2d(kernel_size=2, stride=2),
- )
- self.linear_layers = Sequential(
- Linear(32 56 56, 2)
- )
- # forward propagation
- def forward(self, x):
- x = self.cnn_layers(x)
- x = x.view(x.size(0), -1)
- x = self.linear_layers(x)
- return x
Define model parameters
- # Define model
- model = Net()
- #Define optimizer
- optimizer = Adam(model.parameters(), lr=0.00005)
- # Define loss function
- criterion = CrossEntropyLoss()
- # Check if GPU is available
- if torch.cuda.is_available():
- model = model.cuda()
- criterion = criterion.cuda()
- print(model)
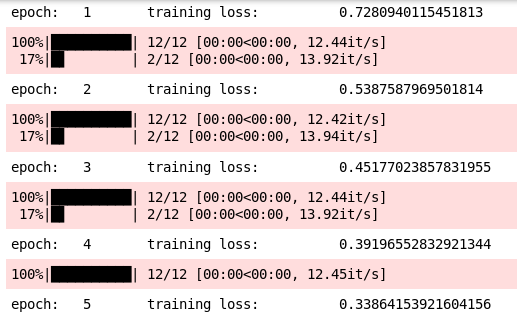
Let's train the model
- torch.manual_seed(0)
- # Model batch size
- batch_size = 128
- # epoch number
- n_epochs = 5
- for epoch in range(1, n_epochs+1):
- # Keep records of training and validation set losses
- train_loss = 0.0
- permutation = torch.randperm(train_x.size()[0])
- training_loss = []
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- optimizer.zero_grad()
- outputs = model(batch_x)
- loss = criterion(outputs,batch_y)
- training_loss.append(loss.item())
- loss.backward()
- optimizer.step()
- training_loss = np.average(training_loss)
- print(‘epoch: \t’, epoch, ‘\t training loss: \t’, training_loss)
- prediction = []
- target = []
- permutation = torch.randperm(train_x.size()[0])
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction.append(predictions)
- target.append(batch_y)
- # Training set accuracy
- accuracy = []
- for i in range(len(prediction)):
- accuracy.append(accuracy_score(target[i],prediction[i]))
- print(‘training accuracy: \t’, np.average(accuracy))

- # Validation set prediction
- prediction_val = []
- target_val = []
- permutation = torch.randperm(val_x.size()[0])
- for i in tqdm(range(0,val_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = val_x[indices], val_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction_val.append(predictions)
- target_val.append(batch_y)
- # Validation set accuracy
- accuracy_val = []
- for i in range(len(prediction_val)):
- accuracy_val.append(accuracy_score(target_val[i],prediction_val[i]))
- print(‘validation accuracy: \t’, np.average(accuracy_val))

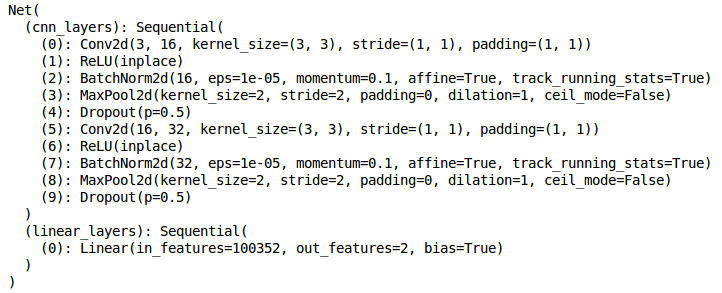
Case Study: Improving the Performance of Vehicle Classification Models
- torch.manual_seed(0)
- class Net(Module):
- def init ( self ):
- super(Net, self).init()
- self.cnn_layers = Sequential(
- # Define 2D convolution layer
- Conv2d(3, 16, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- # BN layer
- BatchNorm2d ( 16 ),
- MaxPool2d(kernel_size=2, stride=2),
- # Add dropout
- Dropout(),
- #Another 2D convolutional layer
- Conv2d(16, 32, kernel_size=3, stride=1, padding=1),
- ReLU ( inplace = True ),
- # BN layer
- BatchNorm2d ( 32 ),
- MaxPool2d(kernel_size=2, stride=2),
- # Add dropout
- Dropout(),
- )
- self.linear_layers = Sequential(
- Linear(32 56 56, 2)
- )
- # forward propagation
- def forward(self, x):
- x = self.cnn_layers(x)
- x = x.view(x.size(0), -1)
- x = self.linear_layers(x)
- return x
Now, we will define the parameters of the model:
- # Define model
- model = Net()
- #Define optimizer
- optimizer = Adam(model.parameters(), lr=0.00025)
- # Define loss function
- criterion = CrossEntropyLoss()
- # Check if GPU is available
- if torch.cuda.is_available():
- model = model.cuda()
- criterion = criterion.cuda()
- print(model)
Finally, let's train the model:
- torch.manual_seed(0)
- # Model batch size
- batch_size = 128
- # epoch number
- n_epochs = 10
- for epoch in range(1, n_epochs+1):
- # Keep records of training and validation set losses
- train_loss = 0.0
- permutation = torch.randperm(train_x.size()[0])
- training_loss = []
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- optimizer.zero_grad()
- outputs = model(batch_x)
- loss = criterion(outputs,batch_y)
- training_loss.append(loss.item())
- loss.backward()
- optimizer.step()
- training_loss = np.average(training_loss)
- print(‘epoch: \t’, epoch, ‘\t training loss: \t’, training_loss)
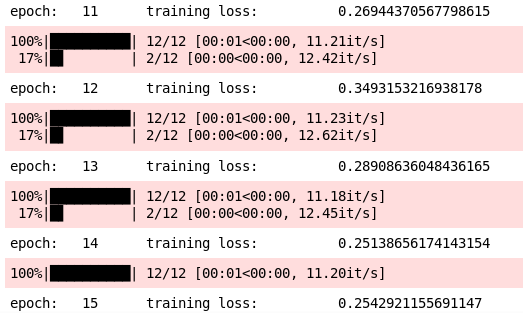
Next, let's check the model's performance:
- prediction = []
- target = []
- permutation = torch.randperm(train_x.size()[0])
- for i in tqdm(range(0,train_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = train_x[indices], train_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction.append(predictions)
- target.append(batch_y)
- # Training set accuracy
- accuracy = []
- for i in range(len(prediction)):
- accuracy.append(accuracy_score(target[i],prediction[i]))
- print(‘training accuracy: \t’, np.average(accuracy))

- # Validation set prediction
- prediction_val = []
- target_val = []
- permutation = torch.randperm(val_x.size()[0])
- for i in tqdm(range(0,val_x.size()[0], batch_size)):
- indices = permutation[i:i+batch_size]
- batch_x, batch_y = val_x[indices], val_y[indices]
- if torch.cuda.is_available():
- batch_x, batch_y = batch_x.cuda(), batch_y.cuda()
- with torch.no_grad():
- output = model(batch_x.cuda())
- softmax = torch.exp(output).cpu()
- prob = list(softmax.numpy())
- predictions = np.argmax(prob, axis=1)
- prediction_val.append(predictions)
- target_val.append(batch_y)
- # Validation set accuracy
- accuracy_val = []
- for i in range(len(prediction_val)):
- accuracy_val.append(accuracy_score(target_val[i],prediction_val[i]))
- print(‘validation accuracy: \t’, np.average(accuracy_val))

The verification accuracy is significantly improved to 73%. marvelous!
end
-
Adjust Dropout rate -
Increase or decrease the number of convolutional layers -
Increase or decrease the number of Dense layers -
Adjust the number of neurons in the hidden layer, etc.