1. Get to know IIC
IIC (I2C) protocol is a serial communication protocol used to connect microcontrollers and peripheral devices. The IIC protocol only requires two signal lines (clock line SCL and data line SDA) to complete communication between devices; supports multiple hosts and multiple slaves Computer communication, distinguishing different devices throughdevice address; in standard mode, it can reach 100Kbit/s,; has a response mechanism that can detect the correctness of data and the existence of equipment. 3.4Mbit/ sHigh speed mode can reach 400Kbit/s, Fast mode can reach
2. Detailed explanation of the agreement
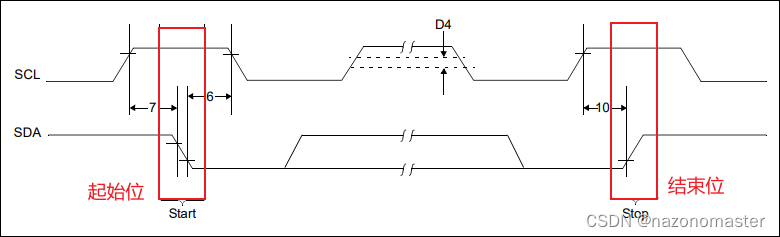
Inidle state, both the clock line and the data line remainhigh level. The specific transmission process of the IIC protocol is as follows:
1. The host sends the start signal, that is, when the clock line SCL remains high, the data line SDA changes from high to high. Flat to low level transition.
2. The host sends the slave device address and read-write control bit< /span> /span>, that is, when the clock line SCL remains high, the data line SDA Transition from low level to high level. The stop signal indicates the end of an IIC communication. stop signal 6. The host sends signal. The response signal indicates that the host needs to continue receiving data bytes, and the non-response signal indicates that the host has completed receiving or an error has occurred. The non-acknowledge signal is achieved by the host pulling the data line SDA high during the last clock cycle. or non-responsesignal< as neededsends a responsehost, then the host releases the data line SDA and the slave sends the data word Festival. After each byte is received, the read operation 5. If the host sends a signal. If the slave receives the data byte, it pulls the data line SDA low to indicate a response signal. If the slave cannot receive the data byte or an error occurs, then keep the data line SDA high and wait for the master to send a stop signal or a new start signal. host continues to send Data byte, after each byte is sent, the data line SDA is released and waits for the slave's response, then the write operation 4. If the host sends a signal. If there is no match, keep the data line SDA high and wait for the host to send a stop signal or a new start signal. pulls the data line SDA low to indicate the response receives the address and control bits, it performs address recognition. If it matches, it will perform address recognition on the next clock. During the cycle, After the slave machine
3. , the device address of the slave is generally 7 bits, and the read and write control bit is 1 bit, 0 indicates a write operation, and 1 indicates a read operation. After sending the 8-bit data, the master releases the data line SDA and waits for the slave's response signal.
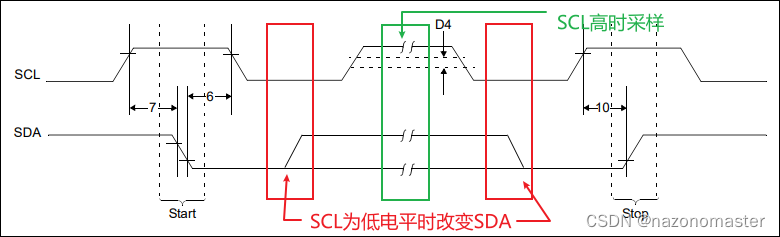
The important start bit and end bit are shown in the figure below, and in the IIC protocol, the device that controls the data line will control the SDA data line whenSCL is low level< /span>:SCL is high level, sample the SDA data line when
3. Specific reading and writing timing
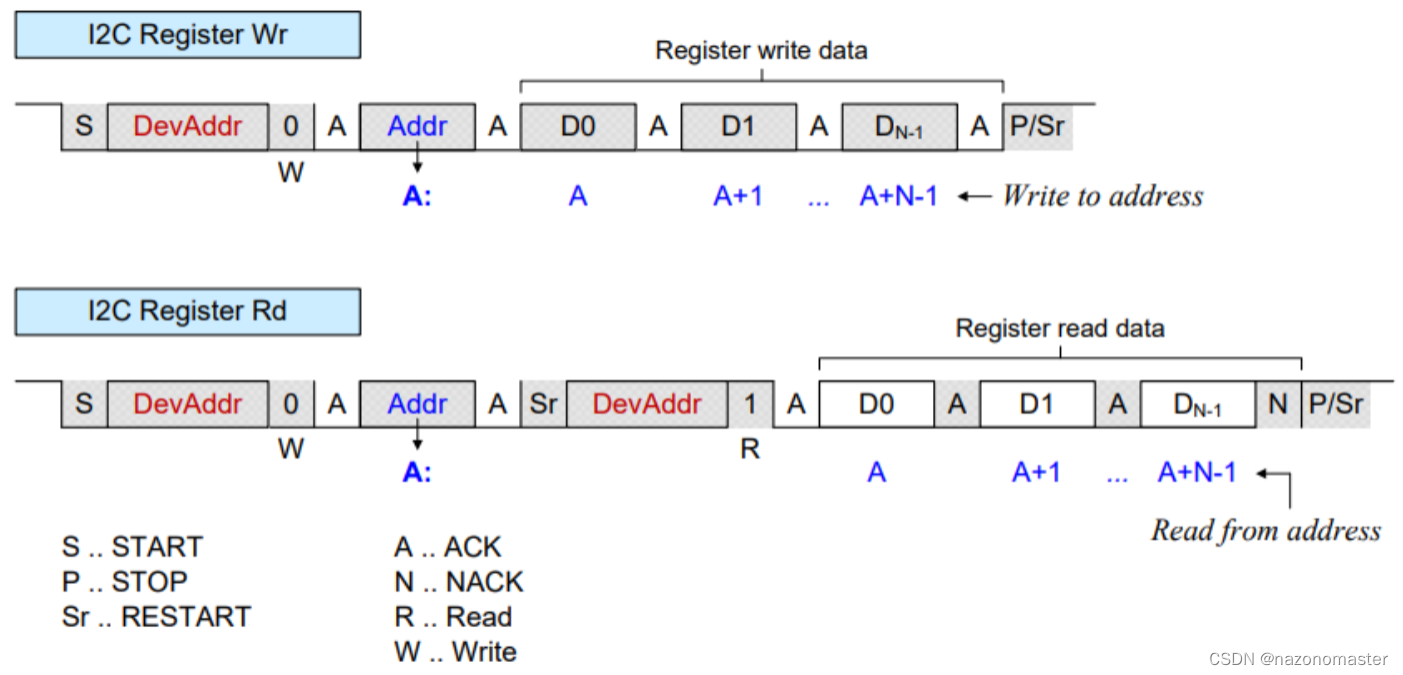
The specific read and write timing diagram is similar to the picture below. This is taken from the manual of a device that supports the IIC protocol. It is worth mentioning that in the picture below, The gray part indicates that the data bus SDA is controlled by the master, and the white part indicates that the data bus SDA is controlled by the slave.
When writing data (I2C Register Wr as shown below): First, the host sends a start bit, followed by a seven-bit wide Device address plus one-bit wide write control bit, slave Response once; then the host sends one byte of register address, from The machine responds once; then the host sends more than one byte of data , the slaveresponds; and finally sends a stop bit.
When reading data (I2C Register Rd as shown below): First, the host sends a start bit, followed by a seven-bit wide Device address plus one-bit wide write control bit; then The master sendsregister address, and the slaveresponds; then resend< /span>non-response. stop bit signal; finally send a . After getting the last byte of data, the host sends a the host responds; the slave machine sends data, responds, used to indicate that the next read operation is to be performed, and the slave machineRead control bit and device address, start bit
4. Design part
Everyone on the website has already explained the design of IIC in great detail. I won’t give a simple explanation here. The following is mainly my personal understanding and design of IIC.
1.Interface design
As a widely used protocol, we should design it into a universal module as much as possible so that it can be used directly next time. Therefore, the interface definition of the module should be as shown in the figure:
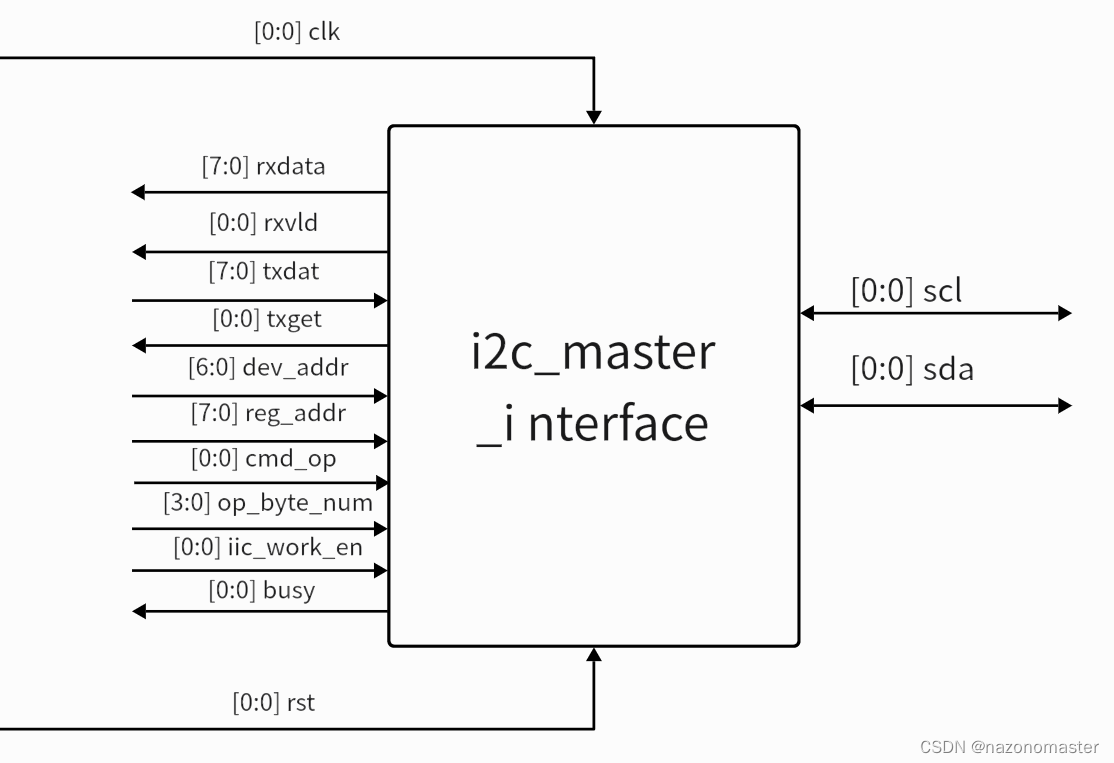
clk Transportation time;
rst is the reset signal (high effective);
txdat indicates the data that needs to be output through IIC;
txget indicates that the signal of this byte has been output;
rxdat represents the data obtained from sda;
rxvld means the data is valid;
dev_addr represents the device address;
reg_addr represents the read and write address (register address);
cmd_op represents a read and write command;
op_byte_num indicates the number of bytes read and written;
iic_work_en indicates the module starts working signal;
busy indicates the working status signal;
scl Display IIC time;
sda Display IIC number;
2. State machine design
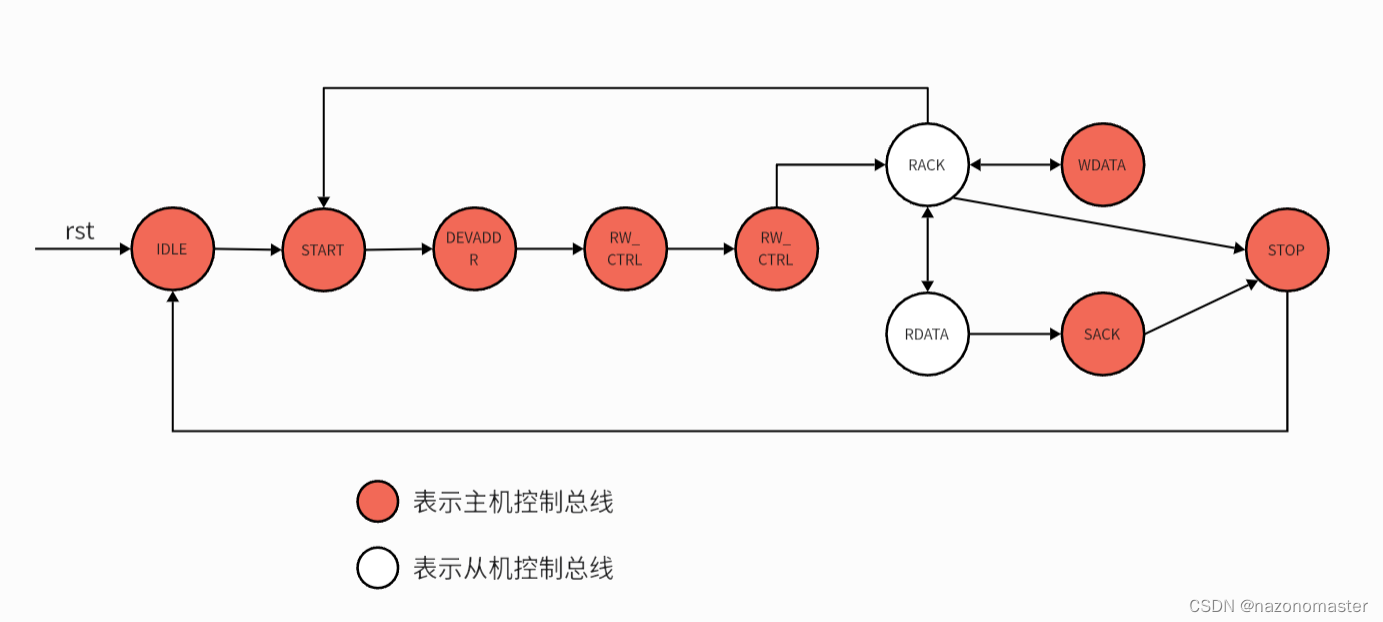
Because it will be more complicated to make an IIC protocol, the form of a state machine is used here to clarify each operation. But generally the IIC state design we see, including when I designed the IIC before, divides each operation into a state. For example, the start bit is a state, the sending device address is a state, and the read and write control bits are One state, receiving a response and sending a non-response are one state respectively, etc. This division is very detailed, and each operation can be clearly understood at a glance, but I think doing so will make the state jump more complicated, making the entire state The machine becomes very bloated, as shown below.
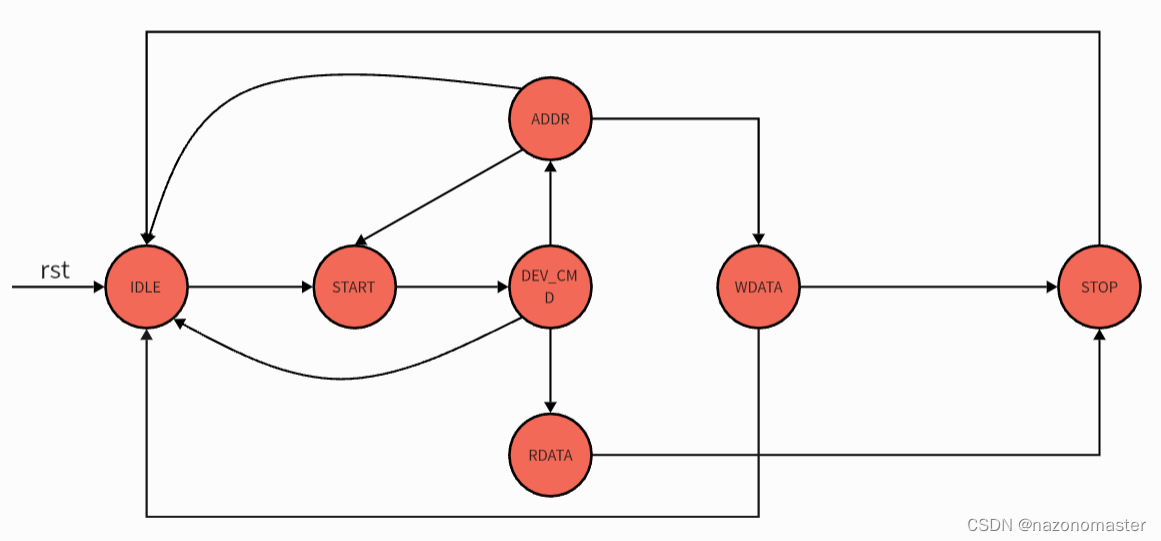
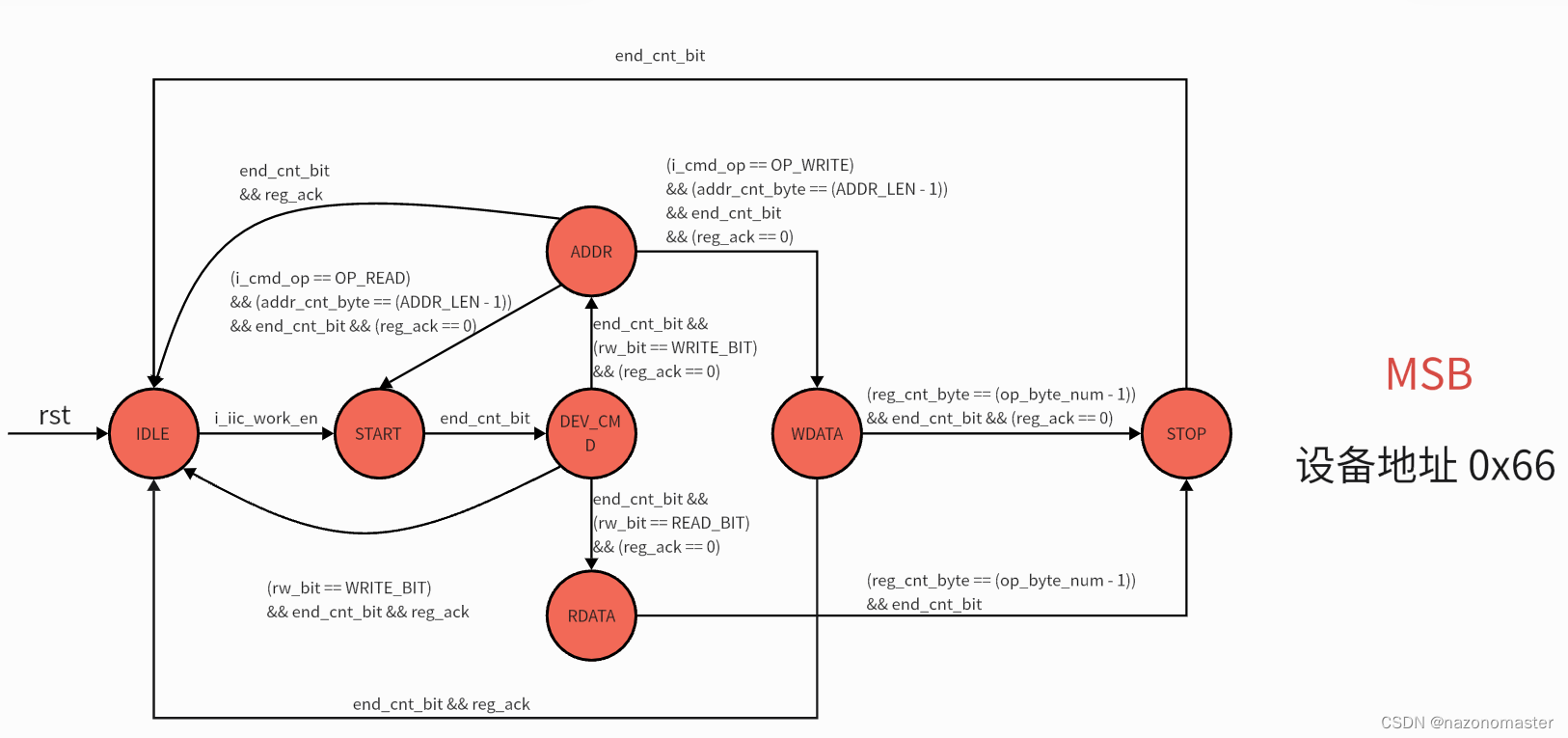
So, I re-conceived the design plan: 9 bits (9bit) are used as one cycle design, that is, every 9 bits or 1 bit is a state. The specific status is as follows:
State 1: IDLE means idle state;
State 2: START represents the starting bit;
State 3: DEV_CMD represents the device address bit, read and write control bit width and the slave’s response bit;
State 4: ADDR represents the address bit of the transmitting register and the response bit of the receiving slave;
Status 5: WDATA represents the write data part;
Status 6: RDATA represents the read data part;
State 7: STOP represents the stop bit;
3. Timing design
writing data timing:


Reading data timing:

4. Code design
First, define the module
Among them, the clock I use is 100Mhz, and the reset signal is active high:
module i2c_master_interface #(
parameter ADDR_LEN = 1,
parameter IIC_CLOCK = 400000
) (
input i_clk ,
input i_rst ,
input [7:0] i_txdat ,
output o_txget ,
output [7:0] o_rxdat ,
output o_rxvld ,
input [6:0] i_dev_addr ,
input [ADDR_LEN*8-1:0] i_reg_addr,
input i_cmd_op ,
input [3:0] i_op_byte_num ,
input i_iic_work_en ,
output o_busy ,
//output o_output_en,
inout io_scl ,
inout io_sda
);
endmodule
The second step is to define the parameters
localparam SCL_PERIOD = 1000/(IIC_CLOCK/100000) , // in_clk = 100MHz
SCL_HALF = SCL_PERIOD >> 1 ,
LOW_HALF = SCL_HALF >> 1 ,
HIGH_HALF = (SCL_PERIOD+SCL_HALF)>>1;
localparam IDLE = 7'b000_0001,
START = 7'b000_0010,
DEV_CMD = 7'b000_0100,
ADDR = 7'b000_1000,
WDATA = 7'b001_0000,
RDATA = 7'b010_0000,
STOP = 7'b100_0000;
localparam WRITE_BIT = 1'b0,
READ_BIT = 1'b1,
OP_WRITE = 1'b0,
OP_READ = 1'b1;
The third step is to define the signals to be used
reg [6:0] state_c ;
reg [6:0] state_n ;
reg [7:0] cnt_scl ;
reg reg_scl ;
reg [3:0] cnt_bit ;
wire end_cnt_bit;
reg [3:0] bit_num ;
reg rw_bit ;
reg [3:0] cnt_byte;
reg [3:0] op_byte_num ;
reg [ADDR_LEN*8-1:0] reg_addr_1;
reg [7:0] reg_addr_2 ;
reg [7:0] reg_txdat ;
reg txget ;
reg reg_sda ;
reg reg_i_sda ;
reg [7:0] rx_data ;
reg reg_ack ;
reg rxvld ;
reg busy ;
wire o_sda;
wire i_sda;
wire o_scl;
wire i_scl;
wire output_en;The fourth step is to construct a finite state machine
According to logic, the jump conditions of the state machine are as follows:
// FMS
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
state_c <= IDLE;
end
else begin
state_c <= state_n;
end
end
always @(*) begin
case (state_c)
IDLE : begin
if (i_iic_work_en) begin
state_n = START;
end
else begin
state_n = state_c;
end
end
START : begin
if (end_cnt_bit) begin
state_n = DEV_CMD;
end
else begin
state_n = state_c;
end
end
DEV_CMD : begin
if (end_cnt_bit && reg_ack) begin // NO ACK
state_n = IDLE;
end
else if ((rw_bit == WRITE_BIT) && end_cnt_bit && (reg_ack == 0)) begin //
state_n = ADDR;
end
else if ((rw_bit == READ_BIT) && end_cnt_bit && (reg_ack == 0)) begin //
state_n = RDATA;
end
else begin
state_n = state_c;
end
end
ADDR : begin
if (end_cnt_bit && reg_ack) begin
state_n = IDLE;
end
else if ((i_cmd_op == OP_WRITE) && (cnt_byte == (ADDR_LEN - 1)) && end_cnt_bit && (reg_ack == 0)) begin //
state_n = WDATA;
end
else if ((i_cmd_op == OP_READ) && (cnt_byte == (ADDR_LEN - 1)) && end_cnt_bit && (reg_ack == 0)) begin //
state_n = START;
end
else begin
state_n = state_c;
end
end
WDATA : begin
if (end_cnt_bit && reg_ack) begin
state_n = IDLE;
end
else if ((cnt_byte == (op_byte_num - 1)) && end_cnt_bit && (reg_ack == 0)) begin //
state_n = STOP;
end
else begin
state_n = state_c;
end
end
RDATA : begin
if ((cnt_byte == (op_byte_num - 1)) && end_cnt_bit) begin //
state_n = STOP;
end
else begin
state_n = state_c;
end
end
STOP : begin
if (end_cnt_bit) begin
state_n = IDLE;
end
else begin
state_n = state_c;
end
end
default: state_n = IDLE;
endcase
end
The fifth step is to construct intermediate logic
// cnt_bit bit_num
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
cnt_bit <= 0;
end
else if ((state_c != IDLE) && (cnt_scl == (SCL_PERIOD - 1))) begin
if (end_cnt_bit) begin
cnt_bit <= 0;
end
else begin
cnt_bit <= cnt_bit + 1;
end
end
end
assign end_cnt_bit = (state_c != IDLE) && (cnt_scl == (SCL_PERIOD - 1)) && (cnt_bit == (bit_num - 1));
always @(*) begin
case (state_c)
IDLE : bit_num = 0;
START : bit_num = 1;
DEV_CMD : bit_num = 9;
ADDR : bit_num = 9;
WDATA : bit_num = 9;
RDATA : bit_num = 9;
STOP : bit_num = 1;
default : bit_num = 0;
endcase
end
// rw_bit
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
rw_bit <= WRITE_BIT;
end
else begin
case (i_cmd_op)
OP_WRITE : rw_bit <= WRITE_BIT;
OP_READ : begin
if ((state_c == STOP) && end_cnt_bit) begin
rw_bit <= WRITE_BIT;
end
else if ((state_c == DEV_CMD) && (rw_bit == WRITE_BIT) && end_cnt_bit && (reg_ack == 0)) begin //
rw_bit <= READ_BIT;
end
end
default : rw_bit <= rw_bit;
endcase
end
end
// cnt_byte op_byte_num
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
cnt_byte <= 0;
end
else if (state_c == IDLE) begin
cnt_byte <= 0;
end
else if ((state_c == ADDR) && end_cnt_bit && (reg_ack == 0)) begin
if (cnt_byte == (ADDR_LEN - 1)) begin
cnt_byte <= 0;
end
else begin
cnt_byte <= cnt_byte + 1;
end
end
else if ((state_c == RDATA || state_c == WDATA) && end_cnt_bit && (reg_ack == 0)) begin
if (cnt_byte == (op_byte_num - 1)) begin
cnt_byte <= 0;
end
else begin
cnt_byte <= cnt_byte + 1;
end
end
end
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
op_byte_num <= 1;
end
else if ((state_c == START) && end_cnt_bit) begin
op_byte_num <= i_op_byte_num;
end
end
// reg_addr_1 reg_addr_2
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
reg_addr_1 <= 0;
end
else if ((state_c == START) && end_cnt_bit) begin
reg_addr_1 <= i_reg_addr;
end
end
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
reg_addr_2 <= 0;
end
else if (state_c == ADDR) begin
reg_addr_2 <= reg_addr_1[((ADDR_LEN - cnt_byte)*8-1) -: 8]; //
end
end
// reg_txdat txget
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
reg_txdat <= 8'hff;
end
else if (state_c == WDATA) begin
reg_txdat <= i_txdat;
end
end
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
txget <= 1'b0;
end
else if ((state_c == WDATA) && end_cnt_bit) begin
txget <= 1'b1;
end
else begin
txget <= 1'b0;
end
end
The sixth step is to build the logic on SCL.
// cnt_scl reg_scl
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
cnt_scl <= 0;
end
else if (state_c != IDLE) begin
if (cnt_scl == (SCL_PERIOD - 1)) begin
cnt_scl <= 0;
end
else begin
cnt_scl <= cnt_scl + 1;
end
end
end
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
reg_scl <= 0;
end
else if (cnt_scl == SCL_HALF - 1) begin
reg_scl <= 1;
end
else if (cnt_scl == SCL_PERIOD - 1) begin
reg_scl <= 0;
end
else begin
reg_scl <= reg_scl;
end
end
The seventh step is to build the logic on SDA
// reg_sda
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
reg_sda <= 1'b1;
end
else begin
case (state_c)
START : begin
if (cnt_scl == LOW_HALF - 1) begin
reg_sda <= 1'b1;
end
else if (cnt_scl == HIGH_HALF -1) begin
reg_sda <= 1'b0;
end
end
DEV_CMD : begin
if (cnt_scl == LOW_HALF - 1) begin
case (cnt_bit)
0 : reg_sda <= i_dev_addr[6];
1 : reg_sda <= i_dev_addr[5];
2 : reg_sda <= i_dev_addr[4];
3 : reg_sda <= i_dev_addr[3];
4 : reg_sda <= i_dev_addr[2];
5 : reg_sda <= i_dev_addr[1];
6 : reg_sda <= i_dev_addr[0];
7 : reg_sda <= rw_bit;
default: reg_sda <= reg_sda;
endcase
end
end
ADDR : begin
if (cnt_scl == LOW_HALF - 1) begin
case (cnt_bit)
0 : reg_sda <= reg_addr_2[7];
1 : reg_sda <= reg_addr_2[6];
2 : reg_sda <= reg_addr_2[5];
3 : reg_sda <= reg_addr_2[4];
4 : reg_sda <= reg_addr_2[3];
5 : reg_sda <= reg_addr_2[2];
6 : reg_sda <= reg_addr_2[1];
7 : reg_sda <= reg_addr_2[0];
default: reg_sda <= reg_sda;
endcase
end
end
WDATA : begin
if (cnt_scl == LOW_HALF - 1) begin
case (cnt_bit)
0 : reg_sda <= reg_txdat[7];
1 : reg_sda <= reg_txdat[6];
2 : reg_sda <= reg_txdat[5];
3 : reg_sda <= reg_txdat[4];
4 : reg_sda <= reg_txdat[3];
5 : reg_sda <= reg_txdat[2];
6 : reg_sda <= reg_txdat[1];
7 : reg_sda <= reg_txdat[0];
default: reg_sda <= reg_sda;
endcase
end
end
RDATA : begin // SACK
if ((cnt_scl == LOW_HALF - 1) && (cnt_byte == op_byte_num - 1) && (cnt_bit == 8)) begin //
reg_sda <= 1'b1; // NACK
end
else if ((cnt_scl == LOW_HALF - 1) && (cnt_bit == 8)) begin
reg_sda <= 1'b0; // ACK
end
end
STOP : begin
if (cnt_scl == LOW_HALF - 1) begin
reg_sda <= 1'b0;
end
else if (cnt_scl == HIGH_HALF -1) begin
reg_sda <= 1'b1;
end
end
default : reg_sda <= reg_sda;
endcase
end
end
// reg_i_sda rx_data reg_ack rxvld
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
reg_i_sda <= 1'b1;
end
else begin
reg_i_sda <= i_sda;
end
end
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
rx_data <= 0;
end
else if ((state_c == RDATA) && (cnt_scl == HIGH_HALF - 1)) begin
case (cnt_bit)
0 : rx_data[7] <= reg_i_sda;
1 : rx_data[6] <= reg_i_sda;
2 : rx_data[5] <= reg_i_sda;
3 : rx_data[4] <= reg_i_sda;
4 : rx_data[3] <= reg_i_sda;
5 : rx_data[2] <= reg_i_sda;
6 : rx_data[1] <= reg_i_sda;
7 : rx_data[0] <= reg_i_sda;
default: rx_data <= rx_data;
endcase
end
end
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
reg_ack <= 1'b1;
end
else if ((state_c == DEV_CMD || state_c == ADDR || state_c == WDATA) && (cnt_bit == 8) && (cnt_scl == HIGH_HALF -1)) begin
reg_ack <= reg_i_sda;
end
end
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
rxvld <= 1'b0;
end
else if ((state_c == RDATA) && end_cnt_bit) begin
rxvld <= 1'b1;
end
else begin
rxvld <= 1'b0;
end
end
Step 8: Construct the busy signal
// busy
always @(posedge i_clk or posedge i_rst) begin
if (i_rst) begin
busy <= 1'b0;
end
else if (i_iic_work_en) begin
busy <= 1'b1;
end
// else if ((state_c == STOP) && end_cnt_bit) begin
// busy <= 1'b0;
// end
else if (state_c == IDLE) begin
busy <= 1'b0;
end
else begin
busy <= 1'b1;
end
end The ninth step, assignment output
// output
assign o_scl = (state_c == IDLE)? 1 : reg_scl;
assign o_txget = txget;
assign o_rxdat = rx_data;
assign o_rxvld = rxvld;
assign o_busy = busy;
assign o_sda = reg_sda;
assign output_en = (state_c == RDATA)? ((cnt_bit == 8)? 1:0) : ((cnt_bit == 8)? 0:1);
//assign o_output_en = output_en;The last step is to build the three-state gate
Here we use the primitive IO_BUF in vivado to build:
IOBUF #(
.DRIVE(12), // Specify the output drive strength
.IBUF_LOW_PWR("TRUE"), // Low Power - "TRUE", High Performance = "FALSE"
.IOSTANDARD("DEFAULT"), // Specify the I/O standard
.SLEW("SLOW") // Specify the output slew rate
) iobuf_inst_sda (
.O ( i_sda ), // Buffer output
.IO ( io_sda ), // Buffer inout port (connect directly to top-level port)
.I ( o_sda ), // Buffer input
.T (~output_en ) // 3-state enable input, high=input, low=output
);
IOBUF #(
.DRIVE(12), // Specify the output drive strength
.IBUF_LOW_PWR("TRUE"), // Low Power - "TRUE", High Performance = "FALSE"
.IOSTANDARD("DEFAULT"), // Specify the I/O standard
.SLEW("SLOW") // Specify the output slew rate
) iobuf_inst_scl (
.O ( i_scl ), // Buffer output
.IO ( io_scl ), // Buffer inout port (connect directly to top-level port)
.I ( o_scl ), // Buffer input
.T ( 0 ) // 3-state enable input, high=input, low=output
);
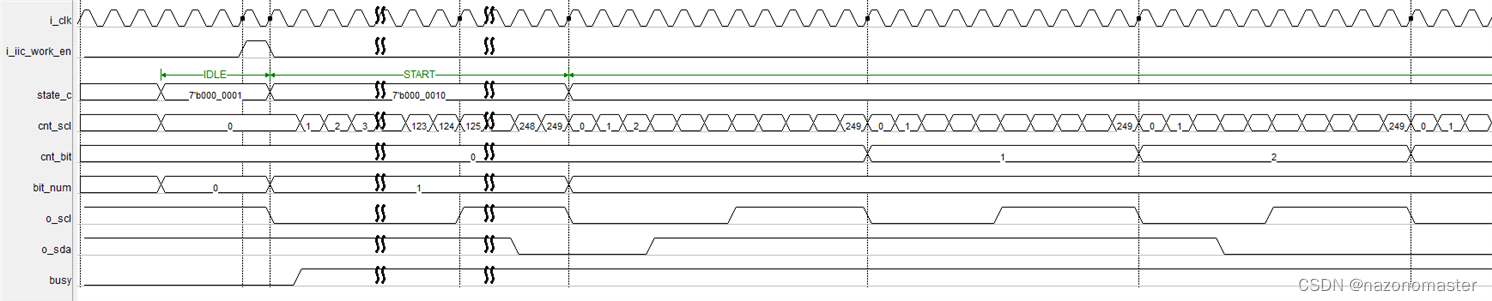
5. Simulation verification
writing timing

Reading timing:

Among them, we can clearly see the following key information:
Starting position:

State 2, device address and write control bits:

State 3, sending register address:

Data writing operation, 5 bytes are written:

The RESTART status during the read operation, the device address, the read control bit and the 1-byte data read out:

Stop bit:

5. Description
As can be seen from the above design, the SCL I designed goes from low to high. At the same time, when in the start bit state, SCL will also go from low to high. This is consistent with what we usually understand as SCL maintaining at the start bit. The high level does not match, as shown in the figure below:
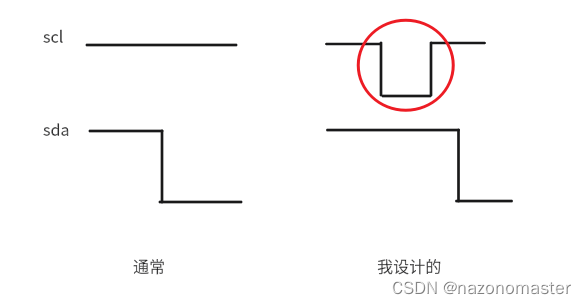
But after my actual testing on the board, this solution is feasible.
Second point, it can be seen from the above design that due to the influence of sequential logic, the output of the busy signal will be delayed by one cycle compared to the state signal, which means that it is best to use Detect the falling edge of busy to determine whether the IIC interface is still working, or change the assignment logic of the busy signal.

