Article directory
Foreword:
I recently made a program for image recognition of crop pests, and I would like to share it here. The deep learning frameworks used in this article are Tensorflow2, Opencv, etc.! The data set used has a total of 61 categories, representing different pest categories. The network model used is moblienetv3.
Bi 设 Dai za
The effect video is as follows:
Crop pest image recognition
Build mobilenetv3 model
The code looks like this:
# 根据tf.keras的官方代码修改的mobilenetv3的网络模型
import tensorflow as tf
from keras import layers, models
"""
Reference:
- [Searching for MobileNetV3](https://arxiv.org/pdf/1905.02244.pdf) (ICCV 2019)
The following table describes the performance of MobileNets v3:
------------------------------------------------------------------------
MACs stands for Multiply Adds
|Classification Checkpoint|MACs(M)|Parameters(M)|Top1 Accuracy|Pixel1 CPU(ms)|
|---|---|---|---|---|
| mobilenet_v3_large_1.0_224 | 217 | 5.4 | 75.6 | 51.2 |
| mobilenet_v3_large_0.75_224 | 155 | 4.0 | 73.3 | 39.8 |
| mobilenet_v3_large_minimalistic_1.0_224 | 209 | 3.9 | 72.3 | 44.1 |
| mobilenet_v3_small_1.0_224 | 66 | 2.9 | 68.1 | 15.8 |
| mobilenet_v3_small_0.75_224 | 44 | 2.4 | 65.4 | 12.8 |
| mobilenet_v3_small_minimalistic_1.0_224 | 65 | 2.0 | 61.9 | 12.2 |
For image classification use cases, see
[this page for detailed examples](https://keras.io/api/applications/#usage-examples-for-image-classification-models).
For transfer learning use cases, make sure to read the
[guide to transfer learning & fine-tuning](https://keras.io/guides/transfer_learning/).
"""
##################################################################################################################################
# 定义V3的完整模型 #################################################################################################################
##################################################################################################################################
def MobileNetV3(input_shape=[224, 224, 3], classes=1000, dropout_rate=0.2, alpha=1.0, weights=None,
model_type='large', minimalistic=False, classifier_activation='softmax', include_preprocessing=False):
# 如果有权重文件,那就意味着要迁移学习,那就意味着需要让BN层始终处于infer状态,否则解冻整个网络后,会出现acc下降loss上升的现象,终其原因是解冻网络之
# 前,网络BN层用的是之前数据集的均值和方差,解冻后虽然维护着新的滑动平均和滑动方差,但是单次训练时使用的是当前batch的均值和方差,差异太大造成特征崩塌
if weights:
bn_training = False
else:
bn_training = None
bn_decay = 0.99 # BN层的滑动平均系数,这个值的设置需要匹配steps和batchsize否则会出现奇怪现象
# 确定通道所处维度
channel_axis = -1
# 根据是否为mini设置,修改部分配置参数
if minimalistic:
kernel = 3
activation = relu
se_ratio = None
name = "mini"
else:
kernel = 5
activation = hard_swish
se_ratio = 0.25
name = "norm"
# 定义模型输入张量
img_input = layers.Input(shape=input_shape)
# 是否包含预处理层
if include_preprocessing:
x = layers.Rescaling(scale=1. / 127.5, offset=-1.)(img_input)
else:
x = img_input
# 定义整个模型的第一个特征提取层
x = layers.Conv2D(16, kernel_size=3, strides=(2, 2), padding='same', use_bias=False, name='Conv')(x)
x = layers.BatchNormalization(axis=channel_axis, epsilon=1e-3, momentum=bn_decay, name='Conv/BatchNorm')(x,
training=bn_training)
x = activation(x)
# 定义整个模型的骨干特征提取
if model_type == 'large':
x = MobileNetV3Large(x, kernel, activation, se_ratio, alpha, bn_training, bn_decay)
last_point_ch = 1280
else:
x = MobileNetV3Small(x, kernel, activation, se_ratio, alpha, bn_training, bn_decay)
last_point_ch = 1024
# 定义整个模型的后特征提取
last_conv_ch = _depth(x.shape[channel_axis] * 6)
# if the width multiplier is greater than 1 we increase the number of output channels
if alpha > 1.0:
last_point_ch = _depth(last_point_ch * alpha)
x = layers.Conv2D(last_conv_ch, kernel_size=1, padding='same', use_bias=False, name='Conv_1')(x)
x = layers.BatchNormalization(axis=channel_axis, epsilon=1e-3, momentum=bn_decay, name='Conv_1/BatchNorm')(x,
training=bn_training)
x = activation(x)
# 如果tf版本大于等于2.6则直接使用下面第一句就可以了,否则使用下面2~3句
# x = layers.GlobalAveragePooling2D(data_format='channels_last', keepdims=True)(x)
x = layers.GlobalAveragePooling2D(data_format='channels_last')(x)
x = tf.expand_dims(tf.expand_dims(x, 1), 1)
# 定义第一个特征分类层
x = layers.Conv2D(last_point_ch, kernel_size=1, padding='same', use_bias=True, name='Conv_2')(x)
x = activation(x)
# 定义第二个特征分类层
if dropout_rate > 0:
x = layers.Dropout(dropout_rate)(x)
x = layers.Conv2D(classes, kernel_size=1, padding='same', name='Logits')(x)
x = layers.Flatten()(x)
x = layers.Activation(activation=classifier_activation, name='Predictions')(x) # 注意损失函数需要与初始权重匹配,否则预训练没有意义
# 创建模型
model = models.Model(img_input, x, name='MobilenetV3' + '_' + model_type + '_' + name)
# 恢复权重
if weights:
model.load_weights(weights, by_name=True)
# print(model.get_layer(name="block_8_project_BN").get_weights()[0][:4])
return model
##################################################################################################################################
# 定义V3的骨干网络,不包含前处理和后处理 ###############################################################################################
##################################################################################################################################
# 定义mobilenetv3-small的骨干部分,不包含第一层的卷积特征提取和后处理
def MobileNetV3Small(x, kernel, activation, se_ratio, alpha, bn_training, mome):
def depth(d):
return _depth(d * alpha)
x = _inverted_res_block(x, 1, depth(16), 3, 2, se_ratio, relu, 0, bn_training, mome)
x = _inverted_res_block(x, 72. / 16, depth(24), 3, 2, None, relu, 1, bn_training, mome)
x = _inverted_res_block(x, 88. / 24, depth(24), 3, 1, None, relu, 2, bn_training, mome)
x = _inverted_res_block(x, 4, depth(40), kernel, 2, se_ratio, activation, 3, bn_training, mome)
x = _inverted_res_block(x, 6, depth(40), kernel, 1, se_ratio, activation, 4, bn_training, mome)
x = _inverted_res_block(x, 6, depth(40), kernel, 1, se_ratio, activation, 5, bn_training, mome)
x = _inverted_res_block(x, 3, depth(48), kernel, 1, se_ratio, activation, 6, bn_training, mome)
x = _inverted_res_block(x, 3, depth(48), kernel, 1, se_ratio, activation, 7, bn_training, mome)
x = _inverted_res_block(x, 6, depth(96), kernel, 2, se_ratio, activation, 8, bn_training, mome)
x = _inverted_res_block(x, 6, depth(96), kernel, 1, se_ratio, activation, 9, bn_training, mome)
x = _inverted_res_block(x, 6, depth(96), kernel, 1, se_ratio, activation, 10, bn_training, mome)
return x
# 定义mobilenetv3-large的骨干部分,不包含第一层的卷积特征提取和后处理
def MobileNetV3Large(x, kernel, activation, se_ratio, alpha, bn_training, mome):
def depth(d):
return _depth(d * alpha)
x = _inverted_res_block(x, 1, depth(16), 3, 1, None, relu, 0, bn_training, mome)
x = _inverted_res_block(x, 4, depth(24), 3, 2, None, relu, 1, bn_training, mome)
x = _inverted_res_block(x, 3, depth(24), 3, 1, None, relu, 2, bn_training, mome)
x = _inverted_res_block(x, 3, depth(40), kernel, 2, se_ratio, relu, 3, bn_training, mome)
x = _inverted_res_block(x, 3, depth(40), kernel, 1, se_ratio, relu, 4, bn_training, mome)
x = _inverted_res_block(x, 3, depth(40), kernel, 1, se_ratio, relu, 5, bn_training, mome)
x = _inverted_res_block(x, 6, depth(80), 3, 2, None, activation, 6, bn_training, mome)
x = _inverted_res_block(x, 2.5, depth(80), 3, 1, None, activation, 7, bn_training, mome)
x = _inverted_res_block(x, 2.3, depth(80), 3, 1, None, activation, 8, bn_training, mome)
x = _inverted_res_block(x, 2.3, depth(80), 3, 1, None, activation, 9, bn_training, mome)
x = _inverted_res_block(x, 6, depth(112), 3, 1, se_ratio, activation, 10, bn_training, mome)
x = _inverted_res_block(x, 6, depth(112), 3, 1, se_ratio, activation, 11, bn_training, mome)
x = _inverted_res_block(x, 6, depth(160), kernel, 2, se_ratio, activation, 12, bn_training, mome)
x = _inverted_res_block(x, 6, depth(160), kernel, 1, se_ratio, activation, 13, bn_training, mome)
x = _inverted_res_block(x, 6, depth(160), kernel, 1, se_ratio, activation, 14, bn_training, mome)
return x
##################################################################################################################################
# 定义V3的骨干模块 #################################################################################################################
##################################################################################################################################
# 定义relu函数
def relu(x):
return layers.ReLU()(x)
# 定义sigmoid函数的近似函数h-sigmoid函数
def hard_sigmoid(x):
return layers.ReLU(6.)(x + 3.) * (1. / 6.)
# 定义swish函数的近似函数,替换原本的sigmoid函数为新的h-sigmoid函数
def hard_swish(x):
return layers.Multiply()([x, hard_sigmoid(x)])
# python中变量前加单下划线:是提示程序员该变量或函数供内部使用,但不是强制的,只是提示,但是不能用“from xxx import *”而导入
# python中变量后加单下划线:是避免变量名冲突
# python中变量前加双下划线:是强制该变量或函数供类内部使用,名称会被强制修改,所以原名称无法访问到,新名称可以访问到,所以也不是外部完全无法访问
# python中变量前后双下划线:是用于类内部定义使用,是特殊用途,外部可以直接访问,平时程序员不要这样定义
# 通过函数实现不管v为多大,输出new_v始终能够被divisor整除,且new_v是大于等于min_value且不能太小的四舍五入最接近divisor整除的数
def _depth(v, divisor=8, min_value=None):
if min_value is None:
min_value = divisor
# 保证new_v一定大于等于min_value,max中第二个值保证是v的四舍五入的能够被divisor整除的数
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
# 保证new_v不要太小
if new_v < 0.9 * v:
new_v += divisor
return new_v
# 在stride等于2时,计算pad的上下左右尺寸,注:在stride等于1时,无需这么麻烦,直接就是correct,本函数仅仅针对stride=2
def pad_size(inputs, kernel_size):
input_size = inputs.shape[1:3]
if isinstance(kernel_size, int):
kernel_size = (kernel_size, kernel_size)
if input_size[0] is None:
adjust = (1, 1)
else:
adjust = (1 - input_size[0] % 2, 1 - input_size[1] % 2)
correct = (kernel_size[0] // 2, kernel_size[1] // 2)
return ((correct[0] - adjust[0], correct[0]),
(correct[1] - adjust[1], correct[1]))
# 定义通道注意力机制模块,这里filters数字应该是要等于inputs的通道数的,否则最后一步的相乘无法完成,se_ratio可以调节缩放比例
def _se_block(inputs, filters, se_ratio, prefix):
# 如果tf版本大于等于2.6则直接使用下面第一句就可以了,否则使用下面2~3句
# x = layers.GlobalAveragePooling2D(data_format='channels_last', keepdims=True, name=prefix + 'squeeze_excite/AvgPool')(inputs)
x = layers.GlobalAveragePooling2D(data_format='channels_last', name=prefix + 'squeeze_excite/AvgPool')(inputs)
x = tf.expand_dims(tf.expand_dims(x, 1), 1)
x = layers.Conv2D(_depth(filters * se_ratio), kernel_size=1, padding='same', name=prefix + 'squeeze_excite/Conv')(x)
x = layers.ReLU(name=prefix + 'squeeze_excite/Relu')(x)
x = layers.Conv2D(filters, kernel_size=1, padding='same', name=prefix + 'squeeze_excite/Conv_1')(x)
x = hard_sigmoid(x)
x = layers.Multiply(name=prefix + 'squeeze_excite/Mul')([inputs, x])
return x
# 定义V3的基础模块,可以通过expansion调整模块中所有特整层的通道数,se_ratio可以调节通道注意力机制中的缩放系数
def _inverted_res_block(x, expansion, filters, kernel_size, stride, se_ratio, activation, block_id, bn_training, mome):
channel_axis = -1 # 在tf中通道维度是最后一维
shortcut = x
prefix = 'expanded_conv/'
infilters = x.shape[channel_axis]
if block_id:
prefix = 'expanded_conv_{}/'.format(block_id)
x = layers.Conv2D(_depth(infilters * expansion), kernel_size=1, padding='same', use_bias=False,
name=prefix + 'expand')(x)
x = layers.BatchNormalization(axis=channel_axis, epsilon=1e-3, momentum=mome, name=prefix + 'expand/BatchNorm')(
x, training=bn_training)
x = activation(x)
if stride == 2:
x = layers.ZeroPadding2D(padding=pad_size(x, kernel_size), name=prefix + 'depthwise/pad')(x)
x = layers.DepthwiseConv2D(kernel_size, strides=stride, padding='same' if stride == 1 else 'valid', use_bias=False,
name=prefix + 'depthwise')(x)
x = layers.BatchNormalization(axis=channel_axis, epsilon=1e-3, momentum=mome, name=prefix + 'depthwise/BatchNorm')(
x, training=bn_training)
x = activation(x)
if se_ratio:
x = _se_block(x, _depth(infilters * expansion), se_ratio, prefix)
x = layers.Conv2D(filters, kernel_size=1, padding='same', use_bias=False, name=prefix + 'project')(x)
x = layers.BatchNormalization(axis=channel_axis, epsilon=1e-3, momentum=mome, name=prefix + 'project/BatchNorm')(x,
training=bn_training)
if stride == 1 and infilters == filters:
x = layers.Add(name=prefix + 'Add')([shortcut, x])
return x
if __name__ == '__main__':
mobilev3=MobileNetV3(input_shape=[64,64,3],classes=61)
mobilev3.summary()
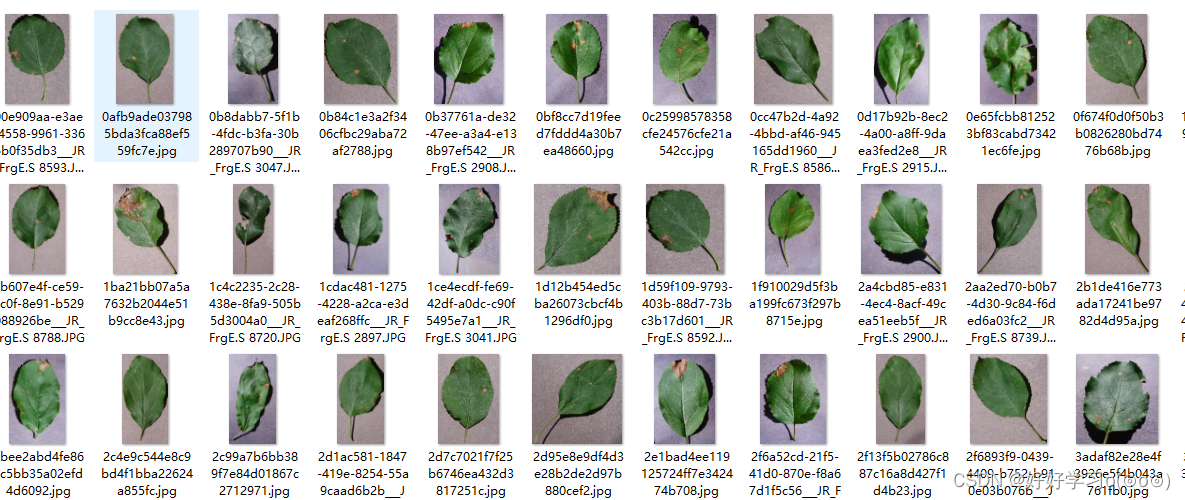
data set:
The data set contains a total of 61 crop images of different pest and disease categories, some of which are shown below.
Model training:
The training code looks like this:
import numpy as np
import tensorflow as tf
import keras
from model import MobileNetV3
import matplotlib.pyplot as plt
x_train=np.load('data/x_train.npy')
y_train=np.load('data/y_train.npy')
x_val=np.load('data/x_val.npy')
y_val=np.load('data/y_val.npy')
#归一化
x_train=(x_train/255.0).astype('float32')
x_val=(x_val/255.0).astype('float32')
model=MobileNetV3(input_shape=[64,64,3],classes=61)
# model.compile() 优化器、损失函数和准确率评测标准
model.compile(optimizer='adam',
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=False),
metrics=['accuracy'])
history = model.fit(x_train, y_train, epochs=50,batch_size=128, validation_data=(x_val, y_val))
model.save('model.h5')
acc = history.history['accuracy']
val_acc = history.history['val_accuracy']
loss = history.history['loss']
val_loss = history.history['val_loss']
plt.subplot(1, 2, 1)
plt.plot(acc, label='Training Accuracy')
plt.plot(val_acc, label='Validation Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.subplot(1, 2, 2)
plt.plot(loss, label='Training Loss')
plt.plot(val_loss, label='Validation Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.savefig('acc_loss.png')
plt.show()
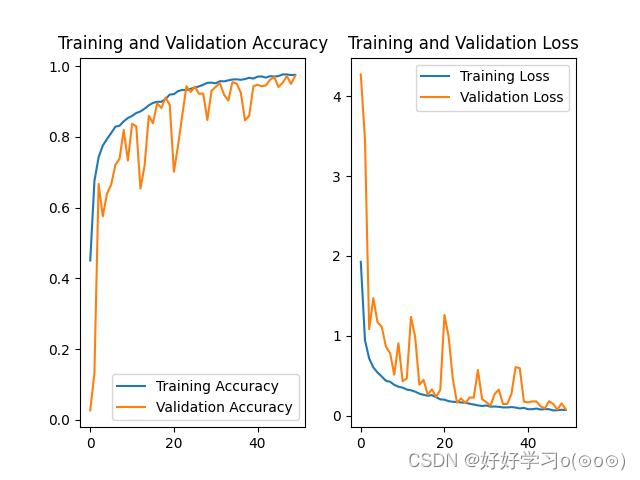
Loss plot and accuracy image:
As can be seen from the figure below, the effect of the model is still acceptable.
Project download:
The project structure is as follows:
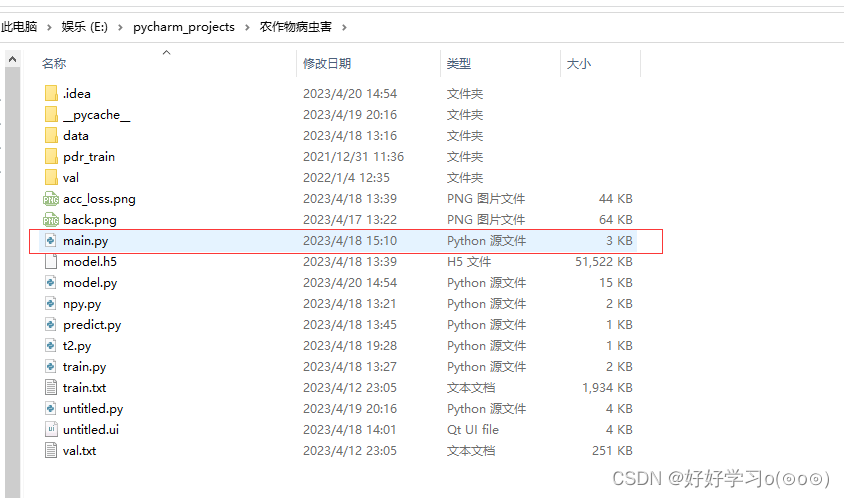
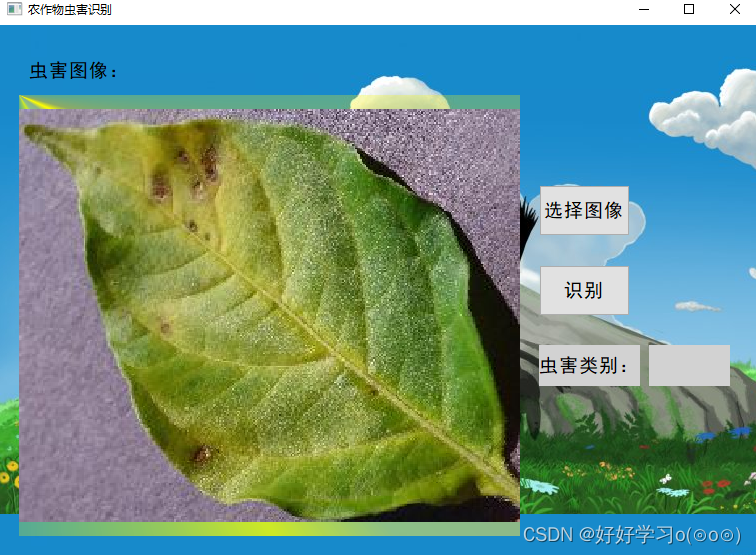
Run main.py to pop up the interface window, as shown below:
Project download:Project download