Article Directory
First of all, you need to understand that the Planning module is based on the levels of Scenario, Stage, and Task, namely: Scenario -> Step -> Specific decision-making method. Apollo can cope with different road scenarios faced by autonomous driving, all of which are registered and managed through Scenario. Scenario uses a finite state machine to judge and select the current driving scene. There are multiple Stages under each Scenario, which refer to the rough steps that need to be executed in the current scene.
The Planning module plans a trajectory for the self-driving vehicle based on the surrounding environment information perceived by routing (navigation module), prediction (perception module), and map positioning and navigation information (including coordinates, speed, acceleration, jerk, time, etc.) , and then pass this information to the control module.
If the vehicle is turning left at the intersection and the left-turn route is occupied, how to realize the detour to the obstacle? The following is for reference only
1. Related codes
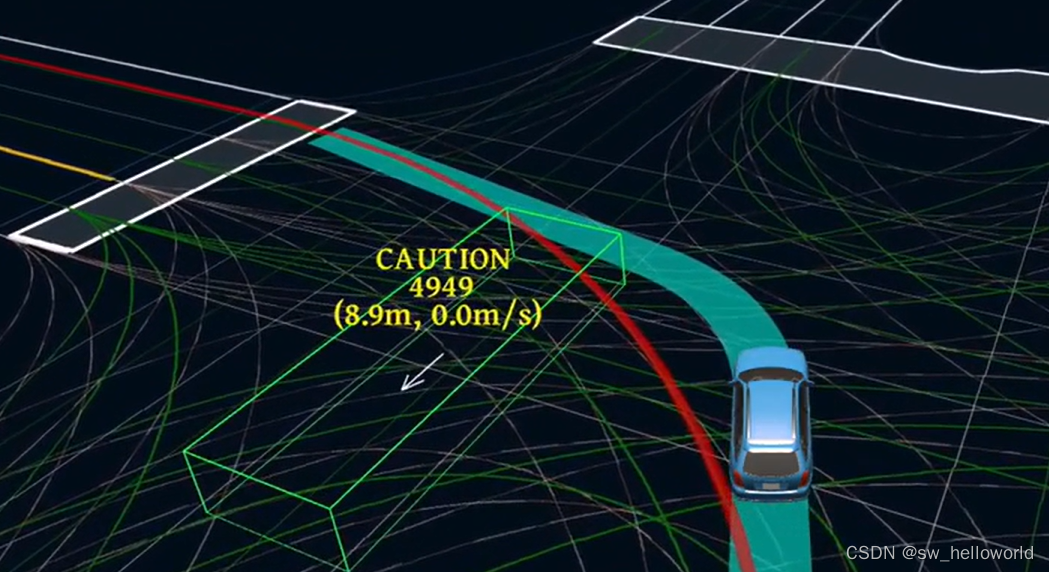
The relevant codes in this part are used to traverse static obstacles to update the path boundary, and the path track points are calculated according to the path boundary, so the path boundary needs to be updated. After updating the boundary, because the obstacle completely blocks the current lane, resulting in the left boundary > right boundary, at this time path_block