概述
Lasso回归采用的是坐标轴下降法(Coordinate Descent, CD)是一种迭代法,通过启发式的方法一步步的迭代求解函数的最小值,和梯度下降法(GD)不同的是,坐标轴下降法是沿着坐标轴的方向去下降,而不是采用梯度的负方向下降。
示意图大致如下:
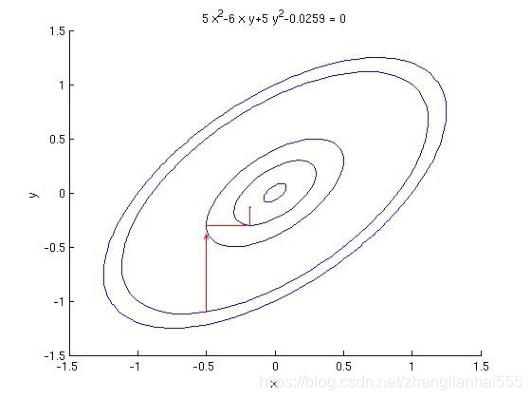
坐标轴下降法利用EM算法的思想,在参数更新过程中,每次均先固定 m-1 个参数值,求解剩下的一个参数的局部最优解;然后进行迭代式的更新操作。
坐标轴下降法的核心思想是多变量函数
F(X) 可以通过每次沿着一个方向优化来获取最小值;其数学依据是:对于一个可微凸函数f(θ),其中θ为n*1的向量,如果对于一个解
θ=(θ1,θ2,...,θn),使得
f(θ) 在每一个坐标轴
θi(i=1,2,..,n) 上都能达到最小值,则
θ=(θ1,θ2,...,θn) 就是的
f(θ) 全局的最小值点。
在坐标轴下降法中,优化方向从算法的一开始就固定了,即沿着坐标的方向进行变化。在算法中,循环最小化各个坐标方向的目标函数。即:如果
xk 给定,那么
xk+1 的第i维度为:
Xik+1=y∈Rargminf(x1k+1,...,xi−1k+1,y,xi+1k,...,xnk)
因此,从一个初始的
x0 求得函数
F(X) 的局部最优解,可以迭代获取
x0、x1、x2...的序列,从而可以得到:
F(X0)≥F(X1)≥F(X2)≥...
算法过程
-
给 θ 向量随机选取一个初值,记做
θ0 ;
-
对于第 k 轮的迭代,从
θ1k 开始计算,
θnk 到为止,计算公式如下:
θ1k θ2k ......θnk =θ1argminJ(θ1,θ2k−1,θ3k−1,...,θnk−1)=θ2argminJ(θ1k,θ2,θ3k−1,...,θnk−1)=θnargminJ(θ1k,θ2k,θ3k,...,θn)
检查
θk 和
θk−1 向量在各个维度上的变化情况,如果所有维度的变化情况都比较小的话,那么认为结束迭代,否则继续 k+1 轮的迭代。
备注:在求解每个参数局部最优解的时候可以求导的方式来求解。
坐标轴下降法和梯度下降法的区别
坐标轴下降法在每次迭代中,计算当前点处沿一个坐标方向进行一维搜索 ,固定其它维度的坐标方向,找到一个函数的局部极小值。而梯度下降总是沿着梯度的负方向求函数的局部最小值;
坐标轴下降优化方法是一种非梯度优化算法。在整个过程中依次循环使用不同的坐标方向进行迭代,一个周期的一维搜索迭代过程相当于一个梯度下降的迭代;
梯度下降是利用目标函数的导数来确定搜索方向的,该梯度方向可能不与任何坐标轴平行。而坐标轴下降法法是利用当前坐标方向进行搜索,不需要求目标函数的导数,只按照某一坐标方向进行搜索最小值;
两者都是迭代算法,且每一轮迭代都需要O(mn)的计算量(m为样本数,n为维度数)
