近段时间有一个项目里的传感器问题一直困扰着我,写控制程序的基础就是传感器获取的数据不说精确到脚指头,起码也要看着像个人,传感器数据波形不说是一条轻微抖动的线,也不能和浪花一样,一波未平一波又起,所以今天就不写控制程序,专门来搞一搞传感器数据误差剔除的工作。
目前我了解到的误差剔除方法包括以下几个,见识广博的大神们请往评论区交流一下你们用的方法
1.3σ原则
3σ原则是在干扰数值服从正态分布的情况下才可以使用的

原则上说,符合正态分布的误差在3个σ内的数据占总数据的99.74%,所以残余误差高于3个σ的数据即可认定为粗大误差。
2.奈尔准则
将一组测量的数据获取之后,将其由小到大排序,取其最大值和最小值作为可疑数据,构造统计量r后去显著度a(0.01或0.05)查阅奈尔临界表得到临界值R,若统计量大于R,则视为粗大误差,剔除,重复循环,直到没有数据剔除为止。未注明的符号意义均与上方一致

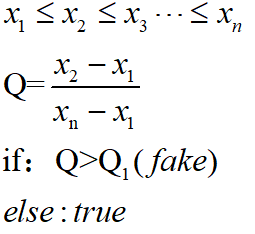
3.狄克松准则 Q检验
该准则不需要估算样本平均值,用于小样本粗大误差剔除方法,将数据由小到大排序,选取最小值和相邻值的差值除以样本最小值和最大值的差值得到Q值,选取置信度后根据置信度和数据数量得到Q值表中的数值Q1,若Q>Q1,则认为最小值为粗大误差,最大值测量方式也相同。
先留着这三个,之后再看其他方法。
