第五章 各种步态下参数的确定
在上一篇中我们已经介绍了四足机器人的相关基本概念,并且利用控制模型实现了机器人的直行。同时我给大家留了一个问题,那就是参数的确定。下面我就来详细讲解这个问题。
关节幅值

以左前腿为例,我们对其进行运动分解,设定初始状态时大腿与垂直方向夹角 ,其运动可分解为:
①该腿向前迈出一步后的姿态,此时机器人身体不发生移动;
②该腿向后迈出一步的姿态,此时机器人身体向前移;
③该腿向前迈步过程中,足端离地最高时的姿态;
因此整个运动周期为:①→②→③→①。张秀丽、郑浩军等前辈通过研究后提出以下假设:
膝关节的运动对四足机器人步长没有贡献,机器人步长由髋关节的运动决定。
膝关节的运动主要对足端离地高度产生影响,避免机器人运动时摆动腿出现搓地、绊倒等问题,摆动腿足端离地高度应该始终大于零。
由设计的膝髋关节运动关系可知,摆动腿最大离地高度位于摆动相中点。
按照以上假设,在支撑相阶段,膝关节保持不变,根据 ,可由四足机器人的运动速度和步态周期求取髋关节幅值。以Tort步态为例,此时 ,机器人躯体在支撑相,摆动相期间均向前移动了S/2,根据几何关系,我们得出以下式子:
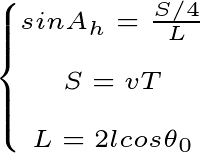
其中,S为一个周期的步长,v为运动速度,T为运动周期, 为腿长,L为初始状态时髋关节与足端的距离,而运动周期可以表示为关于 和 的函数,具体如下:

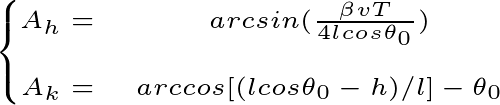
综上,四足机器人的关节幅值 可统一表示为:
根据几何关系,我们利用Solidworks的草图绘制得出以下数据:
- 髋关节摆角与步长的关系:
| S/mm | A_h(º) | S/mm | A_h(º) |
|---|---|---|---|
| 100 | 8.19 | 135 | 10.99 |
| 105 | 8.59 | 140 | 11.39 |
| 110 | 9.00 | 145 | 11.79 |
| 115 | 9.40 | 150 | 12.18 |
| 120 | 9.80 | 155 | 12.57 |
| 125 | 10.20 | 160 | 12.97 |
| 130 | 10.60 | 165 | 13.38 |
- 膝关节摆角与抬腿高度的关系:
| h/mm | A_k(º) |
|---|---|
| 5 | 5.30 |
| 10 | 9.98 |
| 15 | 14.24 |
| 20 | 18.19 |
至此我们已经可以确定各关节幅值了,我们采用的CPG模型需要调节的参数较少,仅包括 , 负载因子 ,以及右后腿相位 。 均取常值,分别为 。
由以上关系可得, Trot步态时, 选定步长为120mm,步态周期为0.4s,足端最大离地高度为5mm,计算得,运动速度v为0.3m/s, , 即 。其余步态的计算方法同理,这里就不展开细说了。
第六章 步态确定
在上一篇中已经提到过,步态指的是各腿在行走时具有固定相位关系的行走模式。换句话说就是,确定各腿之间的相位关系,即可确定步态。而相位关系,在数学上是通过 确定的。为了更加简洁地描述这一问题,我们将CPG控制模型写成全矩阵的形式:

其中, ,R为CPG网络连接权重,他决定了CPG网络各输出单元之间的相位关系,能够控制四足机器人实现不同的步态。因此,我们只需要根据机器人不同步态下的相位图求出R矩阵,即可确定机器人的运动模式。
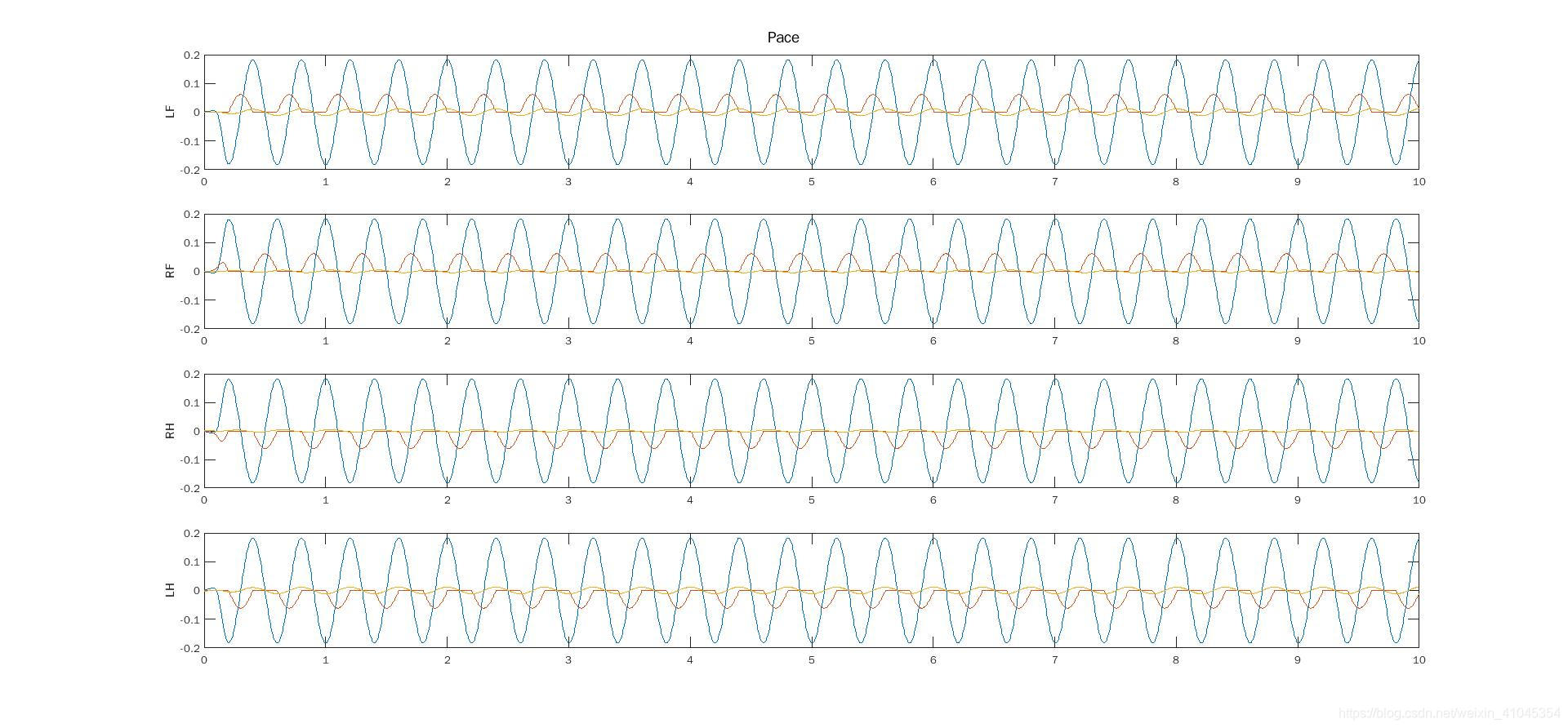
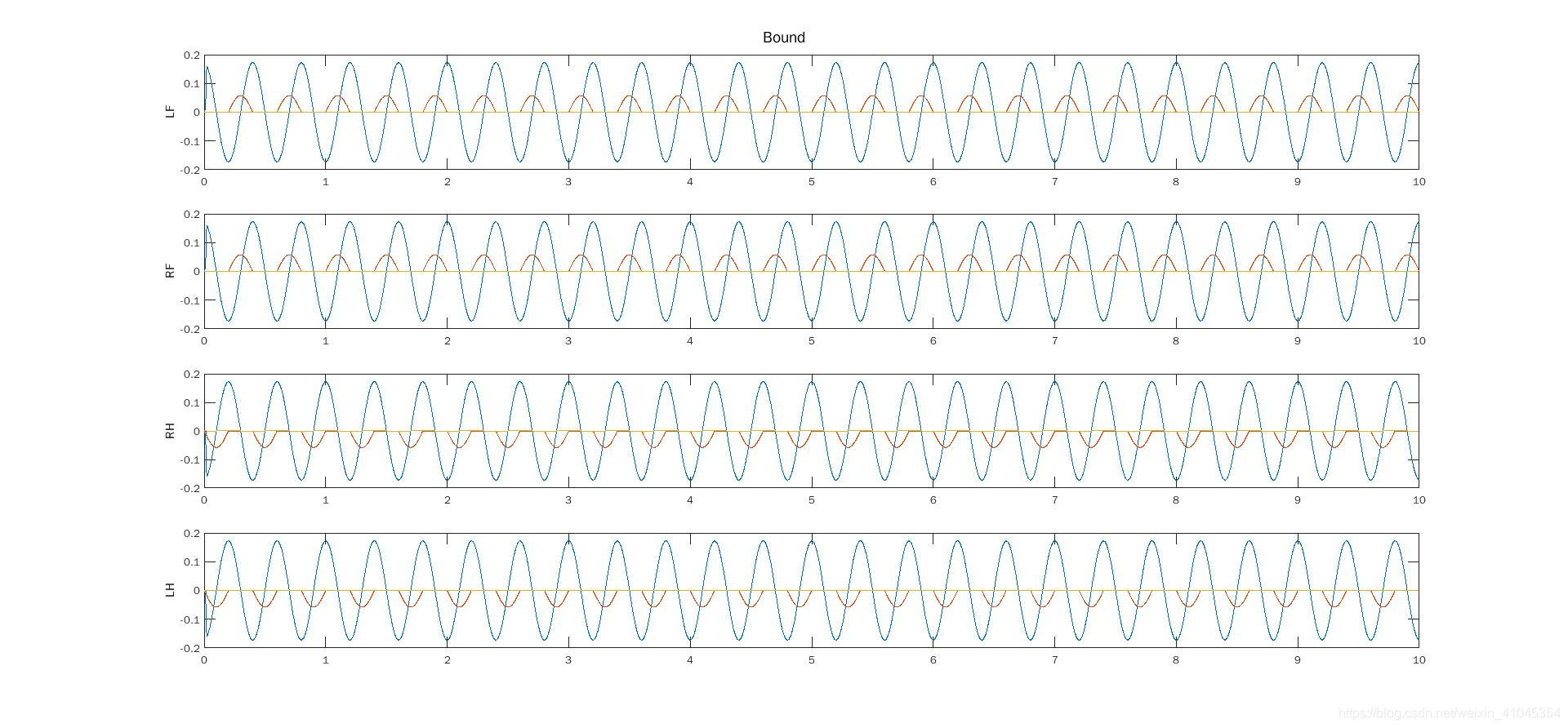
这里我们直接给出输出及仿真结果。
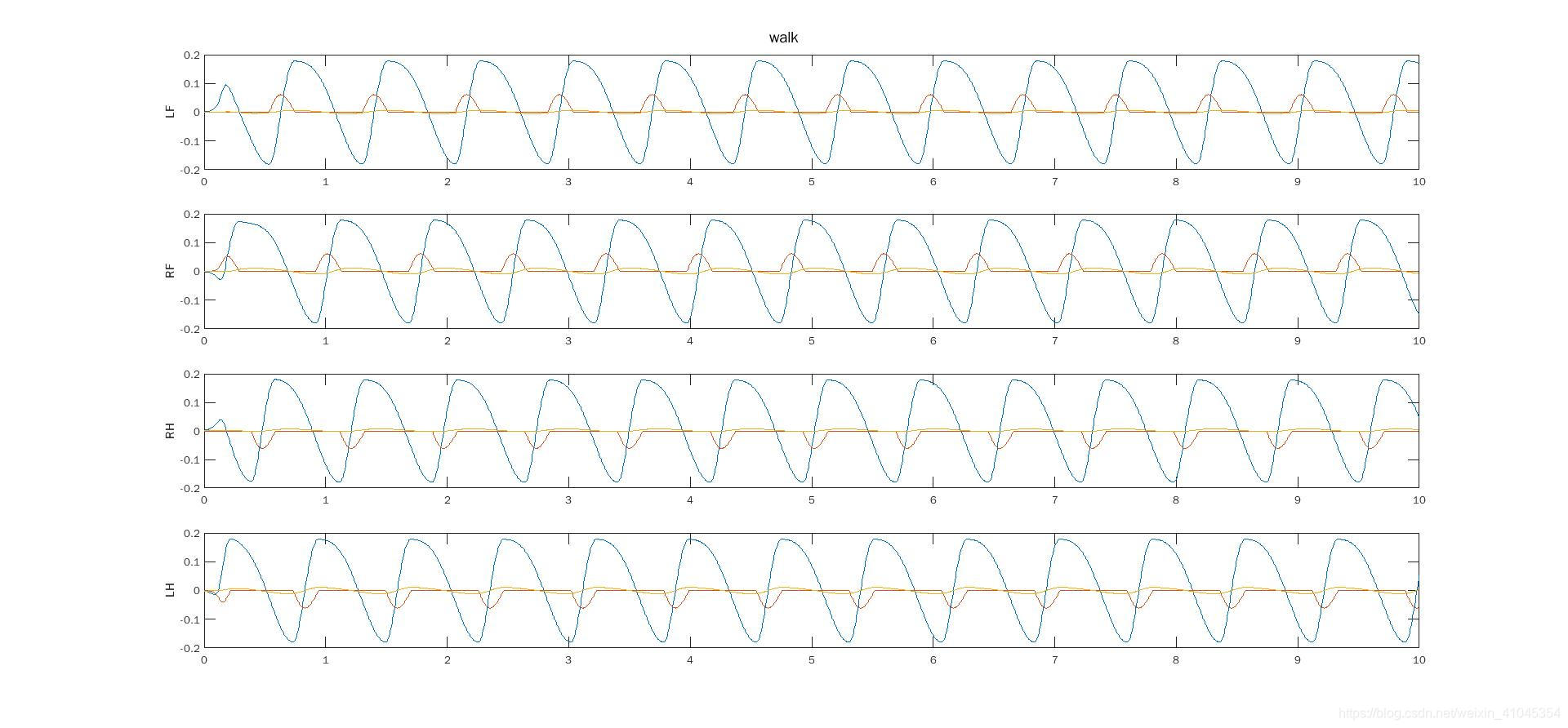

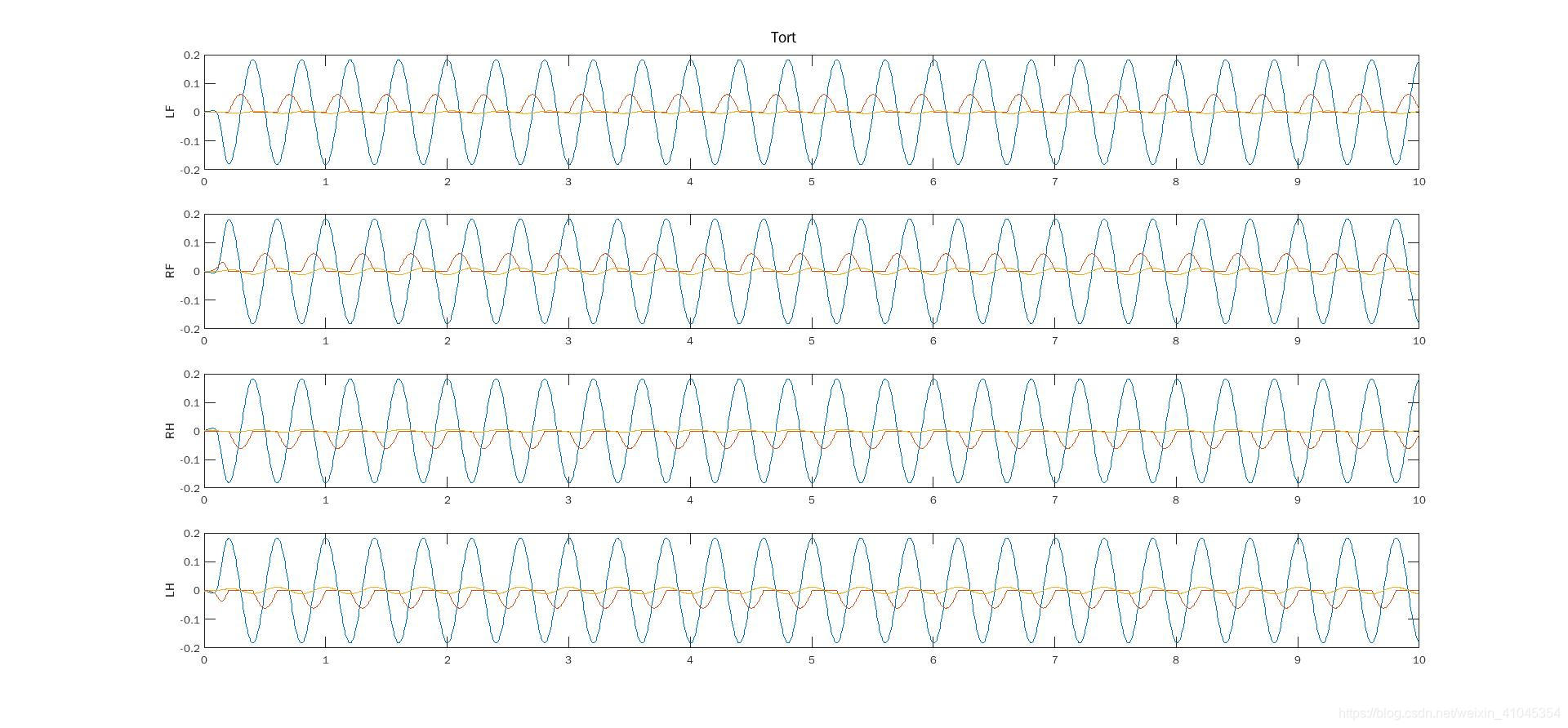
以下两种步态仅供参考,笔者仅通过R矩阵调节各腿相位关系,并未对其余参数作出调整,有兴趣的小伙伴可以尝试修改其余参数察看其运动效果。
第七章 步态转换
密歇根大学机器人与运动实验室(RAM-Lab)的研究人员指出:
在移动相同距离的情况下,四足动物在不同的速度下会使用不同的步态以最小化能量消耗。

研究人员通过分析马的运动实验数据,给出了不同步态对应的能耗与速度之间的关系曲线,如上图所示,研究表明,马的每种步态都存在着一个速度范围,并且在该速度范围内存在一个能耗最低的速度,若运动速度超出了该范围而步态保持不变,能耗会迅速增加,因此为了达到能耗最佳状态,马会根据运动速度的改变选择合适的步态。
对于四足机器人而言,尽管和自然界的四足动物在结构和动作方面存在巨大差异,但上述机理也是同样适用的,因此机器人的能耗也是一个需要重点关注的问题。机器人在实际应用当中,需要自身携带动力,并且受到负载的影响,能量的供应是非常有限的,在这种情况为使机器人能够最大限度地完成任务,则必须尽可能降低其运动过程中的能量消耗,对指定运动速度选择合适的运动步态正是其中一种途径。
CPG步态转换方法
利用CPG模型实现步态转换本质上是调节CPG网络,改变震荡单元之间的相位关系,使得机器人能够从当前运动模式切换到其余运动模式。常用的步态转化方法有4种,分别是:改变CPG网络特性、改变外部激励信号[3,4]、改变神经振荡器本身特性、加入瞬时干扰[5]。这里就不详细说明,有兴趣的小伙伴可以查阅参考文献。我们主要使用的是第一种方法:改变CPG网络特性。学者Delcomyn指出:
动物的CPG神经电路具有动态结构,通过对该结构进行调节可以产生多种生物行为[1]
这个原则应用在步态转换上面,意思就是,改变CPG网络可以实现不同运动模式之间的切换,具体的改变方法有两种:
①调节连接权重:改变神经元之间突触连接的极性或大小,从而改变神经元之间的交互方式[2],即调整R矩阵;
②改变网络的拓扑结构:通过神经元或神经团的元素转移,合并,分解,实现网络拓扑结构的变化[116],即调整各振荡单元的连接关系;
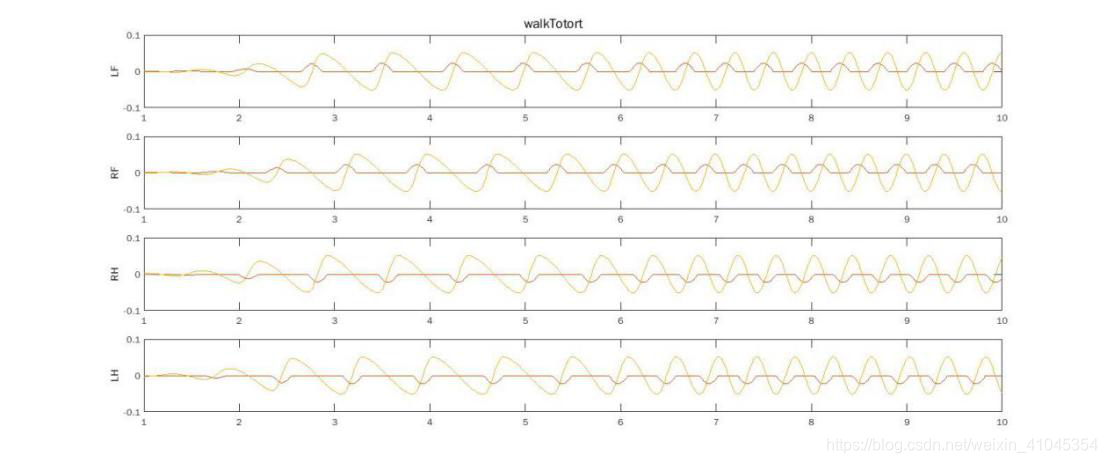
在上一篇中已经指出,相对相位可以表达为负载因子β和右后腿相位 的函数,通过调节 和 便可改变连接权重,即R矩阵的值,从而改变4个振荡器之间的相位关系。如果对 和 的值进行连续调节,即可实现振荡器之间相位关系的连续调整,从而使四足机器人实现平滑的步态转换。以Walk转Tort步态为例,我们有以下关系:

我们使 从0.75连续变换到0.5,得到以下输出曲线。从图像可以看出,步态转变过程平滑、稳定,没有出现停顿、突变等位置点,且可以在任意时间进行步态转换。
在下一篇中我们将会正式进入运动控制部分,首先会对机器人的运动进一步量化,然后会介绍如何实现机器人任意方向的平移运动。尽请期待噢。
参考文献
[1]Fred Delcomyn, Walking Robots and the Central and Peripheral Control of Locomotion in Insects[J]. Autonomous Robots,1999,7(3):259-270.
[2]Sandro Nicole, Eliano Pessa, A network model with auto-oscillating output and dynamic connections[J] Biological Cybernetics, 1994, 70(3): 275-280.
[3]Jun Nishii, A learning model for oscillatory networks[J].Neural Networks, 1998, (11): 249-257.
[4]Christopher Pribe, Stephen Grossberg, Michael A. Cohen, Neural control of interlimb oscillations[J]. Biological Cybernetics,1997,77(2): 131-152.
[5]C. C. Canavier, D. A. Baxter, J. W. Clark , …, Control of multistability in ring circuits of oscillators[J]. Biological Cybernetics,1999,80(2): 87-102.
[6]Fujii A, Ishiguro A, Otsu K, …, Evolutionary creation of an adaptive controller for a legged-robot[C]. Adaptive Motion of animals and Machines. Montreal, Canada, 2000.
