Opencv之图像拼接:基于Stitcher的多图和基于Surf的两图拼接
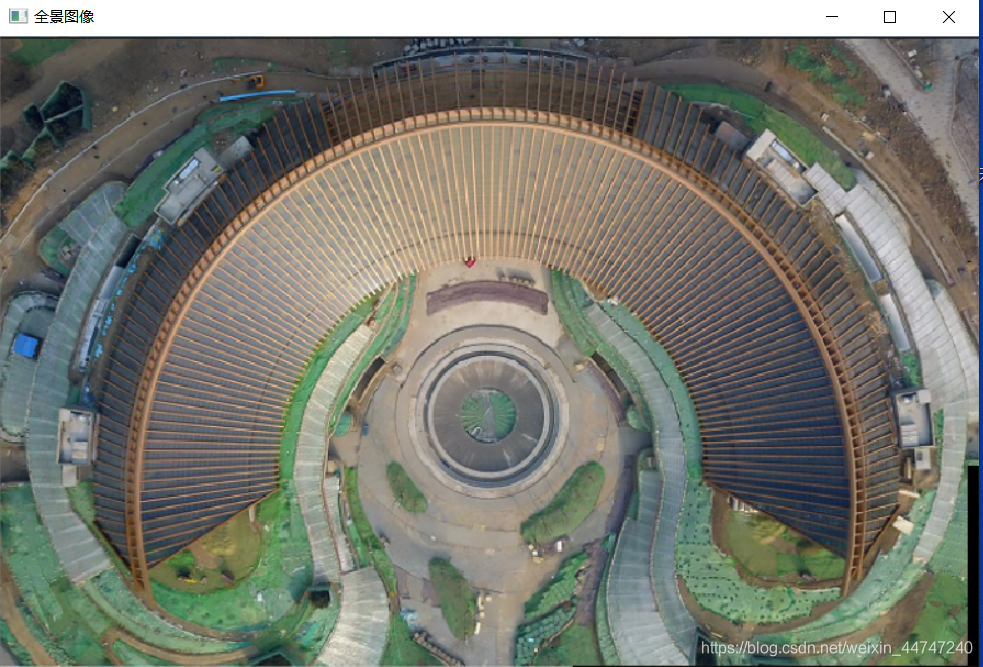
图像拼接算法,一种是调用opencv的stitcher算法,这种调用相对简单,但是其内部算法是很复杂的,这点可以从其cpp里看出,不断匹配运行,得到结果,在尝试过程中,兼容性不是很好,经常会出现无法拼接的情况,速度很慢,错误率较高。这里实现了四幅图像的拼接,效果还不错。
代码如下:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/stitching.hpp>
using namespace std;
using namespace cv;
vector<Mat> imgs;
int main(int argc, char * argv[])
{
imgs.push_back(imread("C:/Users/14587/Desktop/图片素材测试/裁剪2.jpg"));
imgs.push_back(imread("C:/Users/14587/Desktop/图片素材测试/裁剪1.jpg"));
imgs.push_back(imread("C:/Users/14587/Desktop/图片素材测试/裁剪4.jpg"));
imgs.push_back(imread("C:/Users/14587/Desktop/图片素材测试/裁剪3.jpg"));
Stitcher stitcher = Stitcher::createDefault(true);
// 使用stitch函数进行拼接
Mat temp;
Stitcher::Status status = stitcher.stitch(imgs, temp);
if (status != Stitcher::OK)
{
cout << "不能拼接 " << int(status) << endl;
waitKey(0);
return -1;
}
Mat pano2 = temp.clone();
// 显示源图像,和结果图像
namedWindow("全景图像", WINDOW_NORMAL);
imshow("全景图像", temp);
waitKey(0);
if (waitKey() == 27)
return 0;
}
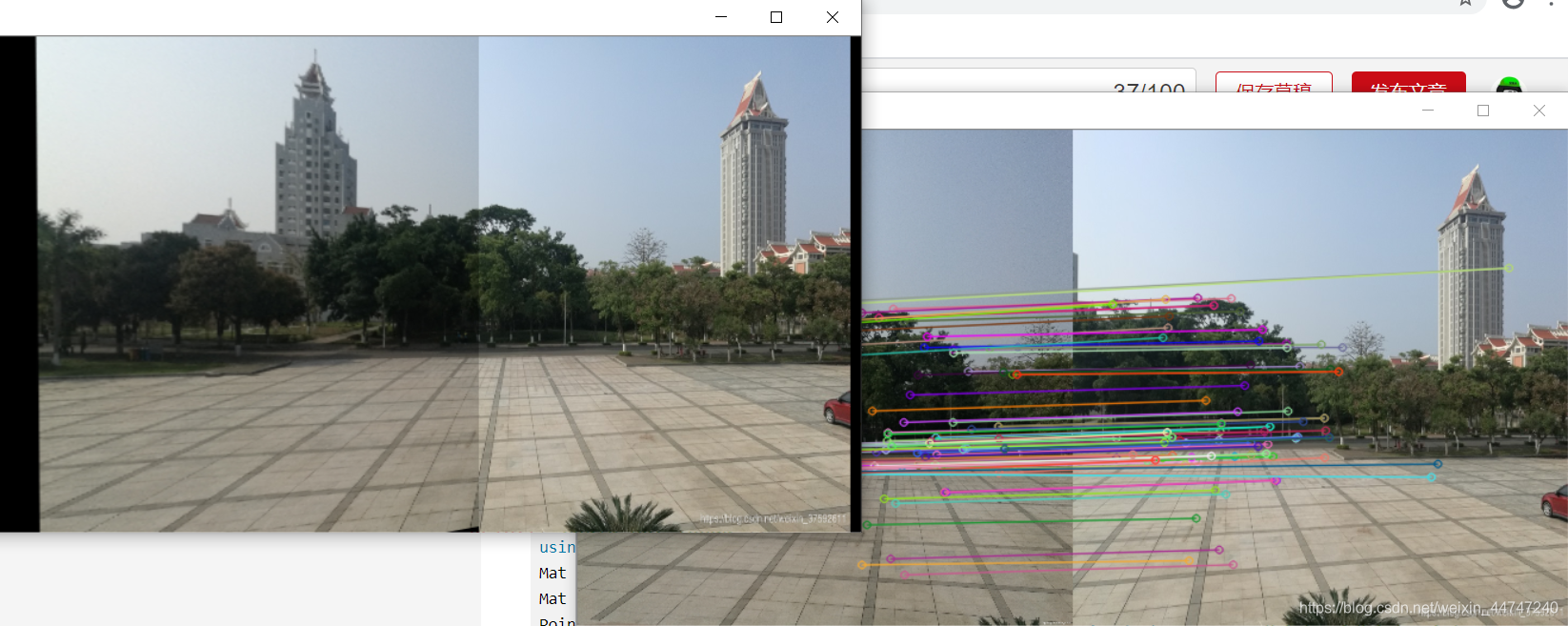
基于surf拼接的代码如下:
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/xfeatures2d.hpp>
#include<iostream>
#include<math.h>
using namespace cv;
using namespace std;
using namespace cv::xfeatures2d;
Mat srcimage_0, srcimage_1, dstimage;
Mat srcimage0, srcimage1;
Point2f getTransformPoint(const Point2f originalPoint, const Mat &transformMaxtri);
//SURF特征提取及暴力匹配
int main() {
srcimage_0 = imread("C:\\Users\\14587\\Desktop\\1.jpg");
srcimage_1 = imread("C:\\Users\\14587\\Desktop\\2.jpg");
if (!srcimage_0.data) {
printf("could not looad");
return -1;
}
if (!srcimage_1.data) {
printf("could not load");
return -1;
}
//cvtColor(srcimage0, srcimage_0, CV_RGB2GRAY);
//cvtColor(srcimage1, srcimage_1, CV_RGB2GRAY);
//resize(srcimage_0, srcimage_0, Size(srcimage_0.cols /4, srcimage_0.rows / 4));
//resize(srcimage_1, srcimage_1, Size(srcimage_1.cols /4, srcimage_1.rows / 4));
resize(srcimage_0, srcimage_0, Size(416, 416));
resize(srcimage_1, srcimage_1, Size(416, 416));
vector<KeyPoint> keypoint0, keypoint1;
//特征点寻找
Mat result0, result1,result;
BFMatcher matcher;
int minhessian = 800;
Ptr<SURF> detector = SURF::create(minhessian);
detector->detect(srcimage_0, keypoint0);
detector->detect(srcimage_1, keypoint1);
Ptr<Feature2D> f2d = xfeatures2d::SURF::create();
f2d->detectAndCompute(srcimage_0,Mat(), keypoint0,result0);
f2d->detectAndCompute(srcimage_1, Mat(), keypoint1, result1);
vector<DMatch> matches;
vector<DMatch> GoodMatchePoints;
matcher.match(result0, result1, matches,Mat());
sort(matches.begin(), matches.end()); //从小到大排序
//最佳匹配点100个
//调整范围
int goodmatch =100;
vector< DMatch > good_matches;
vector<Point2f> imagePoints0, imagePoints1;
for (int i = 0; i < goodmatch; i++) {
good_matches.push_back(matches[i]);
imagePoints0.push_back(keypoint0[good_matches[i].queryIdx].pt);
imagePoints1.push_back(keypoint1[good_matches[i].trainIdx].pt);
}
//绘制特征点
//drawKeypoints(srcimage_0, keypoint0, srcimage_0, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
//drawKeypoints(srcimage_1, keypoint1, srcimage_1, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
drawMatches(srcimage_0, keypoint0, srcimage_1, keypoint1, good_matches, result, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); //绘制匹配点
imshow("拼接", result);
Mat H = findHomography(imagePoints0, imagePoints1, RANSAC, 3, noArray());//最优单映射变换矩阵
Mat adjustMat = (Mat_<double>(3, 3) << 1.0, 0, srcimage_0.cols, 0, 1.0, 0, 0, 0, 1.0);
Mat adjustHomo = adjustMat * H;
Point2f originalLinkPoint, targetLinkPoint, basedImagePoint;
originalLinkPoint = keypoint0[good_matches[0].queryIdx].pt;
targetLinkPoint = getTransformPoint(originalLinkPoint, adjustHomo);
basedImagePoint = keypoint1[good_matches[0].trainIdx].pt;
Mat imageTransform1;
//透视变换
warpPerspective(srcimage_0, imageTransform1, adjustMat*H,Size(srcimage_1.cols + srcimage_0.cols + 10, srcimage_1.rows));
Mat ROIMat = srcimage_1(Rect(Point(basedImagePoint.x, 0),Point(srcimage_1.cols, srcimage_1.rows)));
ROIMat.copyTo(Mat(imageTransform1, Rect(targetLinkPoint.x, 0, srcimage_1.cols - basedImagePoint.x + 1, srcimage_1.rows)));
imshow("拼接结果", imageTransform1);
//putText(result, "No Entry Straight Ahead", scene_corners[0] + Point2f((float)srcimage_0.cols, 0),FONT_HERSHEY_COMPLEX,1.0,Scalar(0,0,255));
waitKey(0);
return 0;
}
Point2f getTransformPoint(const Point2f originalPoint, const Mat &transformMaxtri)
{
Mat originelP, targetP;
originelP = (Mat_<double>(3, 1) << originalPoint.x, originalPoint.y, 1.0);
targetP = transformMaxtri * originelP;
float x = targetP.at<double>(0, 0) / targetP.at<double>(2, 0);
float y = targetP.at<double>(1, 0) / targetP.at<double>(2, 0);
return Point2f(x, y);
}
下面给附上测试图: