元胞自动机理论
许多复杂的问题都可以通过元胞自动机来建立模型,元胞自动机实质上是定义在一个具有离散、有限状态的元胞组成的元胞空间上,并按照一定的局部规则,在离散的时间维度上演化的动力学系统。
元胞又可称为单元、细胞,是元胞自动机的最基本的组成部分。
元胞具有以下特点:
1)元胞自动机最基本的单元。
2)元胞有记忆贮存状态的功能。
3)所有元胞状态都按照元胞规则不断更新。
演化规则
中心元胞的下一个状态由中心元胞的当前状态和其邻居的当前状态按照一定的规则确定。
对于这个专题,主要研究了两个问题,来学习元胞自动机,第一、森林火灾的模拟,第二、单车道交通流的模拟。
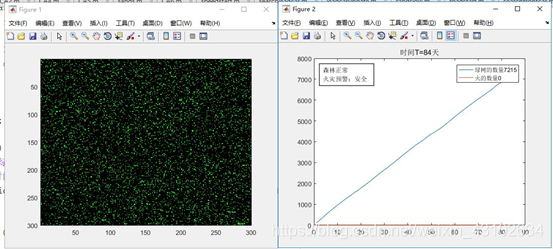
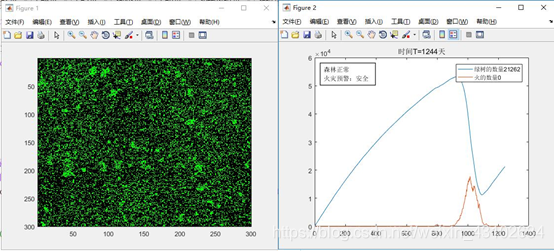
对于森林火灾的模拟:
森林火灾的元胞自动机模型有三种状态:空位,燃烧着的树木及树木。则某元胞下一时刻状态由该时刻本身的状态和周围四个邻居的状态以一定的规则确定,规则如下:
1)如果某树木元胞的4个邻居有燃烧着的,那么该元胞下一时刻的状态是燃烧着的。
2)一个燃烧着的元胞在下一时刻变成空位。
3)所有树木元胞以一个低概率开始燃烧(模拟闪电引起的火灾)
4)所有空元胞以一个低概率变成树木(以模拟新的树木的生长)
Matlab代码:
close;
clear;
clc;
n = 300; %元胞矩阵大小
Plight = 0.000001; Pgrowth = 0.001;
UL = [n 1:n-1];
DR = [2:n 1];
veg = zeros(n,n); %初始化
% The value of veg:
% empty == 0
% burning == 1
% green == 2
imh = image(cat(3,veg,veg,veg));
m=annotation('textbox',[0.1,0.1,0.1,0.1],'LineStyle','-','LineWidth',1,'String','123');
for i = 1:100000
sum = (veg(UL,:) == 1) + (veg(:,UL) == 1) + (veg(DR,:) == 1) + (veg(:,DR) == 1);
%根据规则更新森林矩阵:树 = 树 - 着火的树 + 新生的树
veg = 2 * (veg == 2) - ( (veg == 2) & (sum > 0 | (rand(n,n) < Plight)) ) + 2 * ( (veg == 0) & rand(n,n) < Pgrowth);
a=find(veg==2);
b=find(veg==1);
aa=length(a);
bb=length(b);
shu(i)=aa;
fire(i)=bb*30;
if (bb>=0&&bb<=10)
str1='森林正常';
elseif (bb>10&&bb<=100)
str1='火灾发展';
elseif (bb>100)
str1='森林大火';
end
if ((aa>48000)||(bb>=10))
str2='火灾预警:红色预警';
elseif (aa>42000&&aa<=48000)
str2='火灾预警:黄色预警';
elseif (aa>35000&&aa<=42000)
str2='火灾预警:蓝色预警';
elseif (aa>=0&&aa<=35000)
str2='火灾预警:安全';
end
str=[str1 10 str2];
set(imh, 'cdata', cat(3, (veg == 1), (veg == 2), zeros(n)) )
drawnow
figure(2)
delete(m)
plot(shu);
hold on
plot(fire);
legend(['绿树的数量',num2str(aa)],['火的数量',num2str(bb)]);
title(['时间T=',num2str(i),'天']);
m=annotation('textbox',[0.15,0.8,0.1,0.1],'LineStyle','-','LineWidth',1,'String',str);
hold off
% pause(0.0001)
end
运行截图:


matlab代码:
clc
clear;
%build the GUI
%define the plot button
plotbutton=uicontrol('style','pushbutton','string','Run', 'fontsize',12,'position',[100,400,50,20],'callback','run=1;');
%define the stop button
erasebutton=uicontrol('style','pushbutton','string','Stop','fontsize',12,'position',[200,400,50,20],'callback','freeze=1;');
%define the Quit button
quitbutton=uicontrol('style','pushbutton','string','Quit','fontsize',12,'position',[300,400,50,20],'callback','stop=1;close;');
number=uicontrol('style','text','string','1','fontsize',12,'position',[20,400,50,20]);
%CAsetup
n=1000; %数据初始化
z=zeros(1,n); %元胞个数
z=roadstart(z,200); %道路状态初始化,路段上随机分布200辆
cells=z;
vmax=5; %最大速度
v=speedstart(cells,vmax); %速度初始化x=1; %记录速度和车辆位置
x=1;
memor_cells=zeros(3600,n);
memor_v=zeros(3600,n);
imh=imshow(cells); %初始化图像白色有车,黑色空元胞
set(imh,'erasemode','none')
axis equal
axis tight
stop=0; %wait for a quit button push
run=0; %wait for a draw
freeze=0; %wait for a freeze (冻结)
while (stop==0 && x<1102)
if(run==1)
%边界条件处理,搜素首末车,控制进出,使用开口条件
a=searchleadcar(cells);
b=searchlastcar(cells);
% [cells,v]=border_control(cells,a,b,v,vmax);
i=searchleadcar(cells); %搜索首车位置
for j=1:i
if (i-j+1==n)
[z,v]=leadcarupdate(z,v);
continue;
else
%==========================加速、减速、随机慢化
if cells(i-j+1)==0 %判断当前位置是否非空
continue;
else
v(i-j+1)=min(v(i-j+1)+1,vmax); %加速
%=======================减速
k=searchfrontcar((i-j+1),cells); %搜素前方首个非空元胞位置
if(k==0) %确定与前车之间的元胞数
d=n-(i-j+1);
else
d=k-(i-j+1)-1;
end
v(i-j+1)=min(v(i-j+1),d);%减速
%随机慢化
v(i-j+1)=randslow(v(i-j+1));
new_v=v(i-j+1);
%更新车辆位置
z(i-j+1)=0;
z(i-j+1+new_v)=1;
%更新速度
v(i-j+1)=0;
v(i-j+1+new_v)=new_v;
end
end
end
cells=z;
memor_cells(x,:)=cells; %记录速度和车辆位置
memor_v(x,:)=v;
x=x+1;
set(imh,'cdata',cells) %更新图像
%update the step number diaplay
pause(0.0001);
stepnumber=1+str2num(get(number,'string'));
set(number,'string',num2str(stepnumber))
end
if (freeze==1)
run=0;
freeze=0;
end
drawnow
end
figure(2)
for l=1:1:200
for k=500:1:1000
if memor_cells(l,k)>0
plot(k,l,'k.');
hold on;
end
end
end
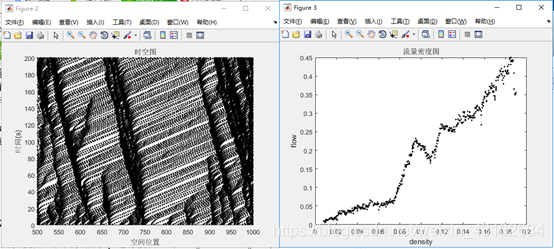
xlabel('空间位置');
ylabel('时间(s)');
title('时空图');
for i=1:1:500
density(i)=sum(memor_cells(i,:)>0)/1000;
flow(i)=sum(memor_v(i,:))/1000;
end
figure(3)
plot(density,flow,'k.');
title('流量密度图')
xlabel('density')
ylabel('flow')
% 函数: speedstart.m程序代码
function [v_matixcells]=speedstart(matrix_cells,vmax)
%道路初始状态车辆速度初始化
v_matixcells=zeros(1,length(matrix_cells));
for i=1:length(matrix_cells)
if matrix_cells(i)~=0
v_matixcells(i)=round(vmax* rand(1));
end
end
end
%函数: searchleadcar.m程序代码
function [location_leadcar]=searchleadcar(matrix_cells)
i=length(matrix_cells);
for j=1:i
if matrix_cells(i-j+1)~=0
location_leadcar=i-j+1;
break;
else
location_leadcar=0;
end
end
end
%函数: leadcarupdate.m程序代码
function [new_matrix_cells,new_v]=leadcarupdate(matrix_cells,v)
%第一辆车更新规则
n=length(matrix_cells);
if v(n)~=0
matrix_cells(n)=0;
v(n)=0;
end
new_matrix_cells=matrix_cells;
new_v=v;
end
%函数: randslow.m程序代码
function[new_v]=randslow(v)
p=0.3;%慢化概率
rand('state',sum(100*clock)*rand(1));
p_rand=rand; %产生随机概率
if p_rand<=p
v=max(v-1,0);
end
new_v=v;
end
%函数: roadstart.m 程序代码
function [matrix_cells_start]=roadstart(matrix_cells,n)
%道路上的车辆初始化状态,元胞矩阵随机为0或1, matrix_cells 初始矩阵,n初始车辆数
k=length(matrix_cells);
z=round(k*rand(1,n));
for i=1:n
j=z(i);
if j==0
matrix_cells(j)=0;
else
matrix_cells(j)=1;
end
end
matrix_cells_start=matrix_cells;
end
% 函数:searchfrontcar.m 程序代码
function [location_frontcar]=searchfrontcar(current_location,matrix_cells)
i=length(matrix_cells);
if current_location==i
location_frontcar=0;
else
for j=current_location+1:i
if matrix_cells(j)~=0
location_frontcar=j;
break;
else
location_frontcar=0;
end
end
end
end
%函数: searchlastcar.m程序代码
function [location_lastcar]=searchlastcar(matrix_cells)
%搜索尾车位置
for i=1:length(matrix_cells)
if matrix_cells(i)~=0
location_lastcar=i;
break;
else %如果路上无车,则空元胞数设定为道路长度
location_lastcar=length(matrix_cells );
end
end
end
运行结果:
参考文献:
[1] CSDN. MATLAB演示元胞自动机算法.
https://blog.csdn.net/qq_40287093/article/details/88095531.2019.8.3. 14:40
[2]百度文库.2014美赛NaSch模型.
https://wenku.baidu.com/view/9047de71e45c3b3567ec8b66.html.2019.8.3.14:42
[3]叶冬,樊镭.一维单车道交通流元胞自动机模型综述[J].物联网技术,2013,3(05):23-25.
