关键词:CubeMX,CubeIDE,STM32G031C8T6,AHT10,DRF1609H
1,修改代码的地方
上一章讲到了应用CubeMX产生了项目源文件,现在用CubeIDE打开,我们会看到很多:
/* USER CODE BEGIN 1*/
/* USER CODE END 1*/
就是说,你的代码要放在这些标记的中间,如果我们返回去CubeMX修改了配置,重新生成了代码,但是放在这些标记中间的代码是不会被修改的。
另外,对于自动产生的代码,尽量不要修改。

2,MCU本身的初始化
这里主要包括时钟、IO口、Timer、串口等的初始化
其中MX_IWDG_Init() 是独立看门狗的初始化,这个先把它注掉,不然不好调试
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
//MX_IWDG_Init();
MX_RTC_Init();
3,MCU初始化,读写内部FLASH,写自定义配置
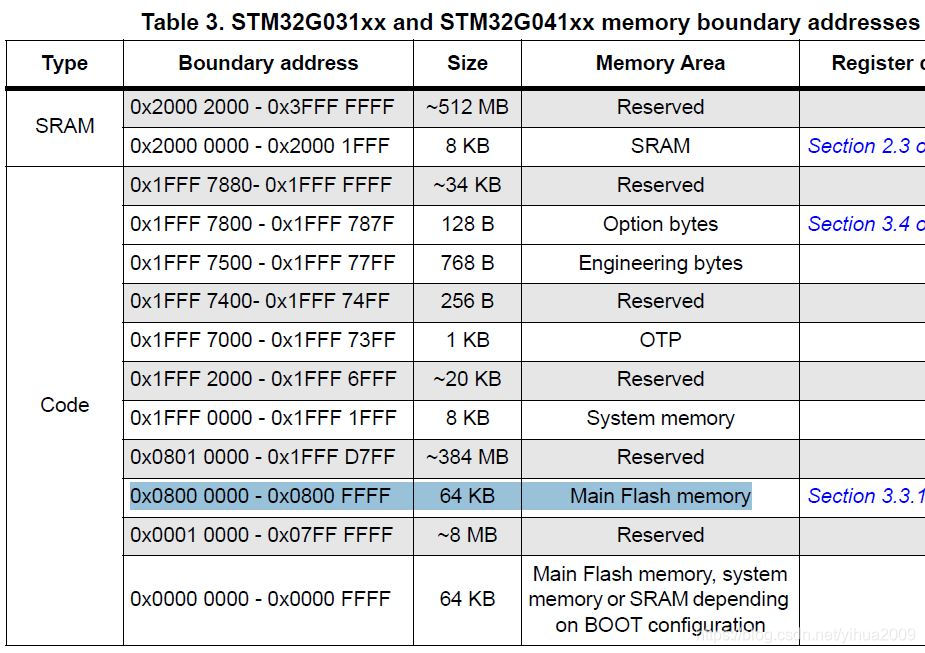
STM32G031C8单片机内部都有很大的内部FLASH空间,我们可以拿出一点来作为自定义的配置空间,这样就不需要额外的EEPROM,但是内部FLASH的稳定性及读写速度、读写便利性不如EEPROM,一般运行过程中,不频繁读写FLASH还是没问题的。
这是写自定义配置的入口:
/* USER CODE BEGIN 2 */
//---1, MCU CONFIGURE ------------
thisMCU_init();
进去看一下:
这里是读FLASH的程序:这里是从baseFlashAdd31地址开始,读40个字节
baseFlashAdd31=0x0800F800,即最后一个2K的程序空间作为自定义空间,因为FLASH是整块擦除的,所以最好定义整块空间。
//-----------------------------
void dtkReadConfigure(void)
{
dtkReadFlash(baseFlashAdd31, 40);
}
//-----------------------------
void dtkReadFlash(uint32_t startAdd, uint16_t countToRead)
{
__IO uint32_t data32 = 0;
uint8_t i=0;
uint32_t tempAdd=0;
tempAdd = startAdd;
for(i=0; i<countToRead; i=i+4)
{
data32 = *(__IO uint32_t *)tempAdd;
//startAdd= startAdd+4;
dtkReadedConfig[i] = (data32>>24) & 0x000000FF;
dtkReadedConfig[i+1] = (data32>>16) & 0x000000FF;
dtkReadedConfig[i+2] = (data32>>8) & 0x000000FF;
dtkReadedConfig[i+3] = data32 & 0x000000FF;
tempAdd = tempAdd +4;
}
}
//-----扇区 32 -------------------------
#define baseFlashAdd31 0x0800F800
下面是写FLASH的程序:
void dtkWriteConfigure(void)
{
dtkWriteFlash(baseFlashAdd31, dtkWritedConfig, 40);
}
/* -----------------------------------------------------------------
* startAdd: 必须为某一页的起始地址:baseFlashAdd60 -baseFlashAdd63
* countToWrite必须为8的倍数(即一次写入为Two Word的倍数)
*
* ----------------------------------------------------------------*/
void dtkWriteFlash(uint32_t startAdd, uint8_t *writeData, uint16_t countToWrite)
{
uint32_t i=0;
uint64_t tempWriteData;
uint32_t tempWriteAdd;
HAL_StatusTypeDef status;
uint32_t tempW1=0;
uint32_t tempW2=0;
HAL_FLASH_Unlock();
//HAL_FLASH_Unlock();
FLASH_EraseInitTypeDef f;
f.TypeErase = FLASH_TYPEERASE_PAGES;
f.Page = 31; //--只读写Page31的内容(即最后一个Page,2K字节
f.NbPages = 1;
uint32_t PageError = 0;
HAL_FLASHEx_Erase(&f, &PageError);
for(i=0; i<countToWrite ; i=i+8)
{
tempW1=0;
tempW2=0;
tempWriteData=0;
tempW1 = writeData[i];
tempW1 = tempW1<<8;
tempW1 = tempW1 | writeData[i+1];
tempW1 = tempW1<<8;
tempW1 = tempW1 | writeData[i+2];
tempW1 = tempW1<<8;
tempW1 = tempW1 | writeData[i+3];
tempW2 = writeData[i+4];
tempW2 = tempW2<<8;
tempW2 = tempW2 | writeData[i+5];
tempW2 = tempW2<<8;
tempW2 = tempW2 | writeData[i+6];
tempW2 = tempW2<<8;
tempW2 = tempW2 | writeData[i+7];
tempWriteData = tempWriteData|tempW2;
tempWriteData = tempWriteData<<32;
tempWriteData = tempWriteData | tempW1;
tempWriteAdd = startAdd + i;
//HAL_FLASH_Program(FLASH_TYPEPROGRAM_FAST, tempWriteAdd, tempWriteData);
HAL_FLASH_Program(FLASH_TYPEPROGRAM_DOUBLEWORD, tempWriteAdd, tempWriteData);
// Wait for last operation to be completed
status = FLASH_WaitForLastOperation((uint32_t)FLASH_TIMEOUT_VALUE);
// If the program operation is completed, disable the PG Bit
CLEAR_BIT(FLASH->CR, FLASH_CR_PG);
// In case of error, stop programation procedure
if (status != HAL_OK)
{
break;
}
}
}
在本项目中,我们开辟了40个字节的自定义配置,其中第一个字节表示配置是否写过了,如果是0xA5,表示配置已经写过了,第二个字节是ModBus地址,默认写入0xF0,最后一个字节是前面39个字节的和保留低8位(和校验),如果校验不通过,则重写FLASH。
其它的字节没有用到。
//--------------
void thisMCU_init(void)
{
uint8_t tempXY=0;
dtkReadConfigure();
switch(is_dtkConfigured(dtkReadedConfig, 40))
{
case 0: //not Configured
dtkWritedConfig[0] = 0xA5; //--是否配置 标志
dtkWritedConfig[1] = 0xF0; //--默认的ModBus地址
tempXY = getXY(dtkWritedConfig,40);
dtkWritedConfig[39] = tempXY;
dtkWriteConfigure();
break;
case 1: //configured, but error
dtkWritedConfig[0] = 0xA5; //--是否配置 标志
dtkWritedConfig[1] = 0xF0; //--默认的ModBus地址
tempXY = getXY(dtkWritedConfig,40);
dtkWritedConfig[39] = tempXY;
dtkWriteConfigure();
break;
case 2: //configured, right
dtkModbusAdd = dtkReadedConfig[1];
drf1609h_status=0;
//newEventStart(EVENT_1, 2000); //--Wait DRF1609H Started - 2S
//newEventStart(EVENT_4, 800); //--WatchDog refresh
break;
}
readDataReportModel();
}
4,MCU初始化,读取本项目运行模式
主要是读取IO口S1,S2的状态,组合成有4种运行模式:就是分别将DRF1609H设置为Router或End Device,主动上报数据或等待ModBus指令上报数据,其中如果将DRF1609H设置成End Device,同时是自动上报数据,则自动进入低功耗上报数据状态。
#define EndDeviceLowPower 1
#define EndDeviceWaitModbus 2
#define RouterActiveReport 3
#define RouterWaitModbus 4
//--------------
void readDataReportModel(void)
{
uint8_t val1=0, val2=0;
val1 = HAL_GPIO_ReadPin(GPIOB, S1_Pin);
val2 = HAL_GPIO_ReadPin(GPIOB, S2_Pin);
//---------
if( (val1==0) & (val2==0) )
{
sysRuningModel = EndDeviceLowPower;
}
//---------
if( (val1==0) & (val2==1) )
{
sysRuningModel = EndDeviceWaitModbus;
}
//---------
if( (val1==1) & (val2==0) )
{
sysRuningModel = RouterActiveReport;
}
//---------
if( (val1==1) & (val2==1) )
{
sysRuningModel = RouterWaitModbus;
}
//--------------- ----------------
if(val2 ==1)
{
dataReportModel = waitModBus;
}
else
{
dataReportModel = activeReport;
}
}
5,LED灯的初始化
本项目中用了2个LED,LED1周期性的闪,用来指示软件是否正常运行,LED2用来指示DRF160H是否加入网络及数据的收发。
LED的闪,我们用到了Timer3的中断,在Timer3的中断里计时,控制LED的闪、灭时间,首先在time.c文件里加上Timer3的中断函数:
/* USER CODE BEGIN 1 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == htim3.Instance) //---Timer3 中断入口 ---------
{
LED1_FLASH();
LED2_FLASH();
newEventCount();
HAL_UART_ReceivedCount();
//HAL_I2C_ReceivedCount();
}
}
/* USER CODE END 1 */
即每次timer3中断后,都会执行下LED1_FLASH(),再进去里面看看:原来是控制LED1闪的速度。
//---------------------------
void LED1_FLASH(void)
{
LED1_FLASH_count++;
switch (LED1_status)
{
case LED_FLASH_quick:
if(LED1_FLASH_count <= LED1_S1)
{
LED1_ON();
}
if( (LED1_FLASH_count > LED1_S1) && (LED1_FLASH_count <= LED1_S2) )
{
LED1_OFF();
}
if ( LED1_FLASH_count > LED1_S2 )
{
LED1_FLASH_count =0;
LED1_ON();
}
break;
case LED_FLASH_medium:
if(LED1_FLASH_count <= LED1_S1)
{
LED1_ON();
}
if( (LED1_FLASH_count > LED1_S1) && (LED1_FLASH_count <= LED1_S10) )
{
LED1_OFF();
}
if ( LED1_FLASH_count > LED1_S10 )
{
LED1_FLASH_count =0;
LED1_ON();
}
break;
case LED_FLASH_slow:
if(LED1_FLASH_count <= LED1_S1)
{
LED1_ON();
}
if( (LED1_FLASH_count > LED1_S1) && (LED1_FLASH_count <= LED1_S20) )
{
LED1_OFF();
}
if ( LED1_FLASH_count > LED1_S20 )
{
LED1_FLASH_count =0;
LED1_ON();
}
break;
case LED_FLASH_on:
LED1_FLASH_count =0;
LED1_ON();
break;
case LED_FLASH_off:
LED1_FLASH_count =0;
LED1_OFF();
break;
case LED_FLASH_oneTime:
if(LED1_FLASH_count <= LED1_S1)
{
LED1_ON();
}
if(LED1_FLASH_count > LED1_S1)
{
LED1_status = LED_FLASH_off;
LED1_FLASH_count =0;
LED1_OFF();
}
break;
}
if( LED1_FLASH_count > LED1_S_END)
{
LED1_FLASH_count =0;
}
}
