1 Ubuntu16.04.6安装
1.1 Ubuntu安装时出现“failed to load ldlinux.c32”
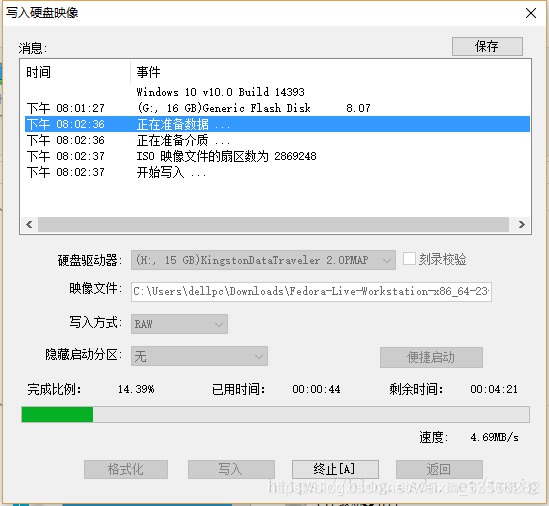
刻录映像时写入方式选择”RAW”,成功解决!!!
1.2 wifi无法使用问题
进入/etc/modprobe.d/文件夹下创建.conf文件,把影响无线wifi开关的“东西”加入黑名单。这个“东西”每种型号品牌的都不一样,在部分联想电脑上是ideapad_laptop,在其他电脑上有可能是其他的名字。
sudo gedit /etc/modprobe.d/ideapad.conf
打开文件后在第一行输入
blacklist ideapad_laptop
保存并关闭后再执行
sudo modprobe -r ideapad_laptop
重启之后,右上角的wifi就可以使用了。
注:modprobe命令用于智能地向内核中加载模块或者从内核中移除模块。
1.3 Chrome安装
https://dl.google.com/linux/direct/google-chrome-stable_current_amd64.deb
sudo dpkg -i google-chrome*
1.4 git: command not found
sudo apt-get install git -y
1.5 dpkg: error: dpkg frontend is locked by another process
sudo apt-get install -f
#查看哪個LOCK
sudo rm /var/lib/dpkg/lock-frontend
sudo apt-get install -f
1.6 sogou输入法安装
1.7 sogou输入法乱码解决
终端输入
cd ~/.config
rm -rf SogouPY* sogou*
然后杀掉输入法进程
killall fcitx
最后注销重进当前账户
2 cuda9.0安装
2.1 资料介绍
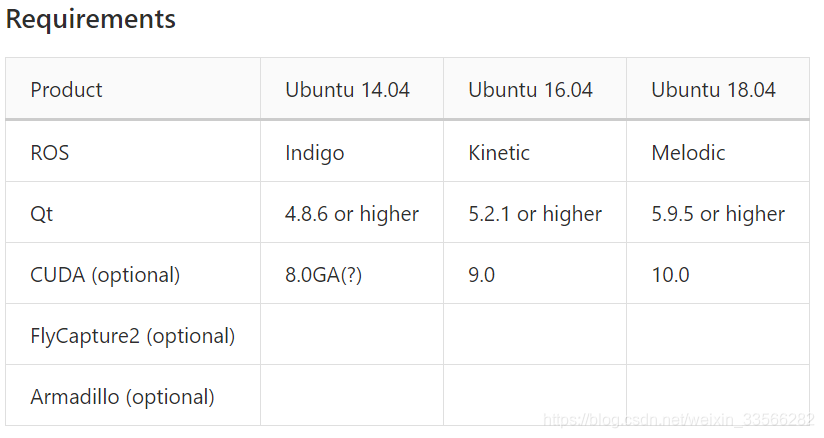
autoware官网上,所需ROS,Qt,cuda版本如图,按要求下载对应软件
nvidia旧版本下载,但旧版本不够旧,需要继续找
cuda旧版本地址下载
cudnn旧版本下载
nvidia和cuda版本对应关系
tensorflow,cuda,cudnn版本对应关系
故选择cudnn7.0.5,cuda9.0,nvidia-435.21进行安装
nvidia-435.21安装:
# 进入超级终端
sudo su
# 禁用 nouveau 驱动
gedit /etc/modprobe.d/blacklist.conf
追加内容
# generated by nvidia-installer
blacklist nouveau
options nouveau modeset=0
# 然后执行:
update-initramfs -u
# 重启之后,可以查看nouveau有没有运行:
lsmod | grep nouveau # 没输出代表禁用生效
# 禁用桌面
service lightdm stop
# 主要表现为在登录界面输入密码后依然跳转回登陆界面,无限循环,这是我在使用.run文件安装时遇到的问题,这里有一个亲测有效的解决方案:
sudo ./NVIDIA.run -no-x-check -no-nouveau-check -no-opengl-files
# -no-x-check:安装驱动时关闭X服务
# -no-nouveau-check:安装驱动时禁用nouveau
# -no-opengl-files:只安装驱动文件,不安装OpenGL文件
# 这样再reboot,就不会出现循环登录的问题。
nvidia-smi
会有如下显示,则安装成功
2.2 cuda9.2安装
进入cuda_9.2.88_396.26_linux.run所在的文件夹下
sudo sh cuda_9.2.88_396.26_linux.run
出现说明之后,按Enter键跳过,会提示是否接受,键入accept。此时,注意:安装第一步会提示是否安装驱动,请一定键入n。之后每一步选择y,当需要确认路径时直接按回车,结束安装。
加入环境变量,键入:
sudo gedit ~/.bashrc
在结尾加入:
export PATH=/usr/local/cuda-9.2/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda-9.2/lib64:$LD_LIBRARY_PATH
zaizhongduanqiaoru
source ~/.bashrc
保存、退出、重启。
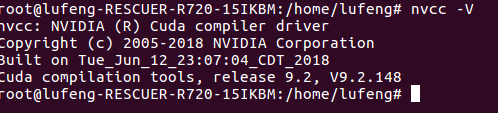
当你在终端敲入
nvcc -V
会有如下显示,则安装成功
2.3 cudnn安装
首先解压
tar -xzvf ~/Downloads/cudnn-9.2-linux-x64-v7.5.0.56.tgz
然后将解压内容拷贝到系统目录,并修改访问权限。
sudo cp ~/Downloads/cuda/include/cudnn.h /usr/local/cuda/include
sudo cp ~/Downloads/cuda/lib64/libcudnn* /usr/local/cuda/lib64
sudo chmod a+r /usr/local/cuda/include/cudnn.h /usr/local/cuda/lib64/libcudnn*
3 ROS安装
#install ros-kinetic
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get -y update
sudo apt-get -y install ros-kinetic-desktop-full
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
4 autoware安装
源码安装
https://www.cnblogs.com/hgl0417/p/10643760.html
首先,安装 Ubuntu 16.04 ROS Kinetic的依赖
sudo apt-get update
sudo apt-get install -y python-catkin-pkg python-rosdep python-wstool ros-$ROS_DISTRO-catkin libmosquitto-dev gksu
git clone https://github.com/CPFL/Autoware.git --recurse-submodules
由于colcon出现问题,所以采用catkin_make方式安装,需要将项目分支切换1.10.0
git checkout 1.11.1 colcon_release
git checkout 1.10.0 catkin_make_release
git checkout 1.10.0
cd ~/autoware/ros/src
catkin_init_workspace
cd ../
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro $ROS_DISTRO # 当询问是否需要下载非认证版本时(好像是这样),选择y
./catkin_make_release
4.1 rosdep update problem
ERROR: unable to process source

首先删除默认文件20-default.list。ctrl+Alt+T打开一个终端,输入以下代码。
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
初始化
sudo rosdep init # 从ROS官网上下载一个20-default.list,可以直接编辑
再更新
rosdep update # 这一步会出现 connect confused 的情形,网上好多方法试过,没有那么管用(个人感觉),最后发现,多试上百次就可以了,哈哈哈!
