课程讲义:http://vision.stanford.edu/teaching/cs131_fall1718/files/04_filters.pdf
图像采样(sampling)和量化(quantization)
首先,自然界中的每一景象都是“continuous”,然而这在计算机的世界观中是不可接受的。所以必须把模拟信号进行采样和量化才能得到图像矩阵,当然了,这一过程产生误差和丢失信息也是不可避免的。图像矩阵的每一个元素都是一个像素点(pixel dot,以下像素点和矩阵元素等价),分辨率(resolution, 单位dpi,dots per inch)表示单位面积之内的像素点个数,当图像矩阵确定时,仅和人眼的直接观察效果有关。像素点的内容决定了图片的类型:
黑白图片:矩阵元素是0-1binary,0表示黑,1表示白。
灰阶图片:矩阵元素是[0,N],0表示黑,N表示白,共切割为N-1阶。
彩色图片:矩阵元素是[0,N],按照一定的标准(如RGB, Lab, HSV, etc.)可以覆盖常见色域的N-1种颜色
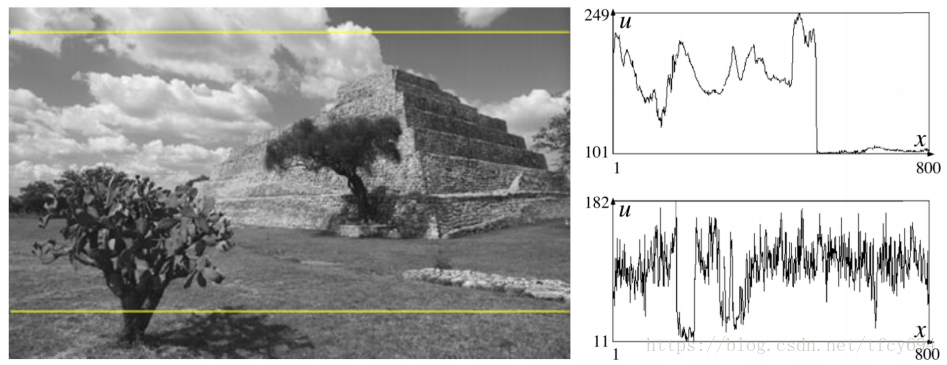
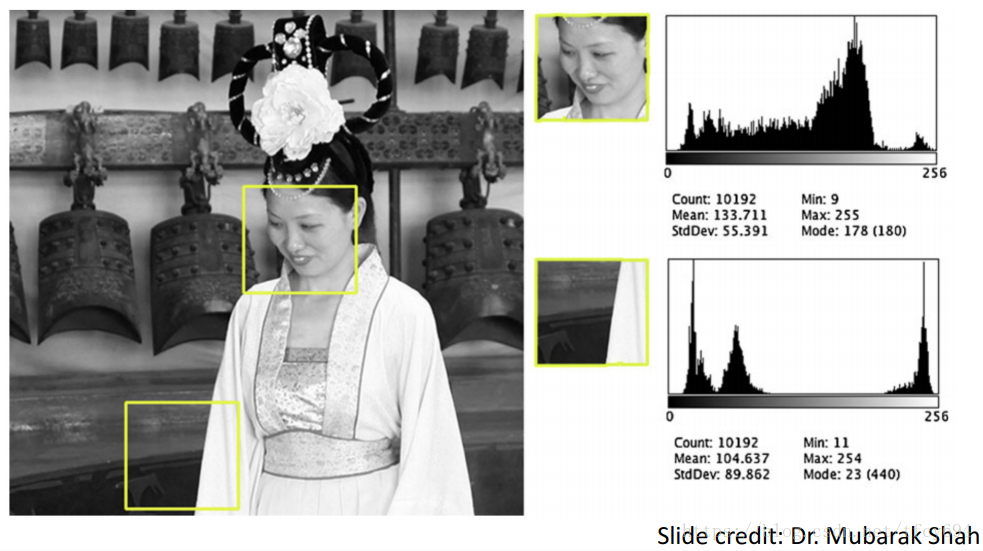
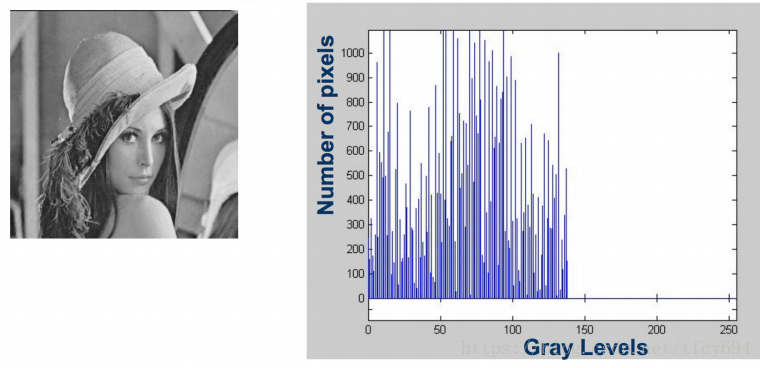
图像直方图(histogram)
概念同统计学中的直方图概念,即:对一定范围内(如每行、每图像块、每幅全图像,etc.)的像素点,按照各个像素的值进行频数统计并作图。
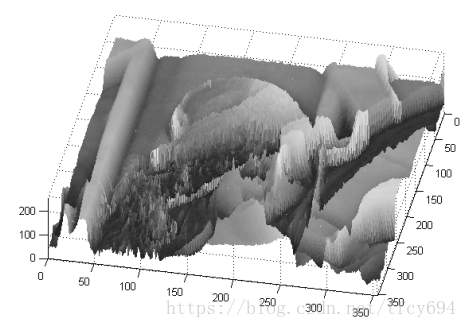
图像函数
前面我们是通过矩阵的角度理解“图像”的,换个角度,把一幅“图像”看作一个函数,定义域是全体像素坐标,映射关系是每个像素坐标处对应的像素值。有了“函数”的抽象,则可以利用信号与系统的知识对函数进行operate。

线性系统(滤波器(filter))
滤波器是处理一幅图获得另一幅图的装置(或者函数、系统等等任何方便理解的名词都可),文中举了移动平均和阈值两种滤波器。其系统函数分别如下:
以下知识主要基于《信号与系统》和《离散时间信号处理》:
1.线性(linear)系统S[f(x, y)]的定义主要有来自两条:
数乘条件:
可加条件:
综合等价于为:
2.移不变(shift invariant)系统的要求:若 ,则
如无特殊说明,本文所指的“系统”均为线性移不变系统(LSI),除了前述3个条件外,其他条件重要性略低,可参考上述两书,此处不再赘述。
另有冲激函数
的定义:此函数在原点处的值为1,在其他处的值为0。
则所有图像函数都可以看作产生位移的冲激函数的线性组合,对于原函数的operate可以由移不变性质转化为对于冲激函数的operate,大大化简了信号处理过程。
卷积(convolution)
卷积的表达式:
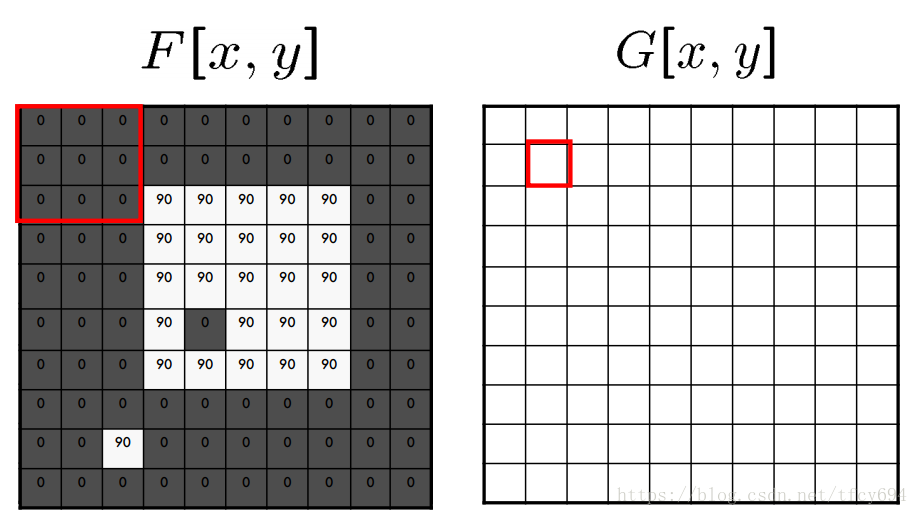
信号输入LSI系统进行process的过程可以看作和系统函数进行卷积的过程。值得注意的是,卷积表达式是无穷的,而图片和计算机处理过程通常是有限的,所以必须考虑边缘效应(edge effect)。如图,对F进行九宫格移动平均得到等大的G,其中计算G左上角格时F的边缘溢出,需要进行扩展(pad),即假设溢出区域的值用于计算,padding的方案包括用0pad、边缘值pad等。
相关(correlation)
顾名思义,相关是用来描述两幅图像内容相似度的函数。定义式如下:
上式中 表示g的共轭对称函数。在实值函数中为g本身。