版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
关于透视变换 cv2.warpPerspective 详情请查看:
https://blog.csdn.net/dcrmg/article/details/80273818
https://blog.csdn.net/qq_27261889/article/details/80720359
关于FLANN匹配 详情请查看:https://blog.csdn.net/wsp_1138886114/article/details/90578810
图像拼接:
import numpy as np
import imutils
import cv2
class Stitcher:
def __init__(self):
self.isv3 = imutils.is_cv3(or_better=True)
def stitch(self, images, ratio=0.75, reprojThresh=4.0,
showMatches=False):
# 简单地检测关键点并从两个图像中提取局部不变量描述符SIFT并匹配
(imageB, imageA) = images
(kpsA, featuresA) = self.detectAndDescribe(imageA)
(kpsB, featuresB) = self.detectAndDescribe(imageB)
M = self.matchKeypoints(kpsA, kpsB,featuresA, featuresB, ratio, reprojThresh)
# 没有足够的匹配关键点,返回空
if M is None:
return None
# 应用透视变换将图像缝合在一起
(matches, H, status) = M
result = cv2.warpPerspective(imageA, H,(imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
# 检查是否应该可视化关键点匹配
if showMatches:
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches,status)
return (result, vis)
# 返回缝合图像
return result
def detectAndDescribe(self, image):
"""
:param image:
:return: 特征描述点
"""
descriptor = cv2.xfeatures2d.SIFT_create()
(kps, features) = descriptor.detectAndCompute(image, None)
kps = np.float32([kp.pt for kp in kps])
return (kps, features)
def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB,
ratio, reprojThresh):
matcher = cv2.DescriptorMatcher_create("BruteForce")
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
for m in rawMatches:
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
matches.append((m[0].trainIdx, m[0].queryIdx))
# 计算两组点之间的单应性需要 至少初始的四组匹配。
if len(matches) > 4:
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC,reprojThresh)
return (matches, H, status)
return None
# 可视化
def drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
for ((trainIdx, queryIdx), s) in zip(matches, status):
# 仅当关键点成功匹配时才处理匹配
if s == 1:
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
return vis
if __name__ == '__main__':
imageA = cv2.imread(r'C:\Users\xxx\Desktop\jianzhu0.jpg')
imageB = cv2.imread(r'C:\Users\xxx\Desktop\jianzhu1.jpg')
imageA = imutils.resize(imageA, width=400)
imageB = imutils.resize(imageB, width=400)
# 将图像缝合在一起以创建全景图
stitcher = Stitcher()
(result, vis) = stitcher.stitch([imageA, imageB], showMatches=True)
cv2.imshow("Image A", imageA)
cv2.imshow("Image B", imageB)
cv2.imshow("Keypoint Matches", vis)
cv2.imshow("Result", result)
cv2.waitKey(0)
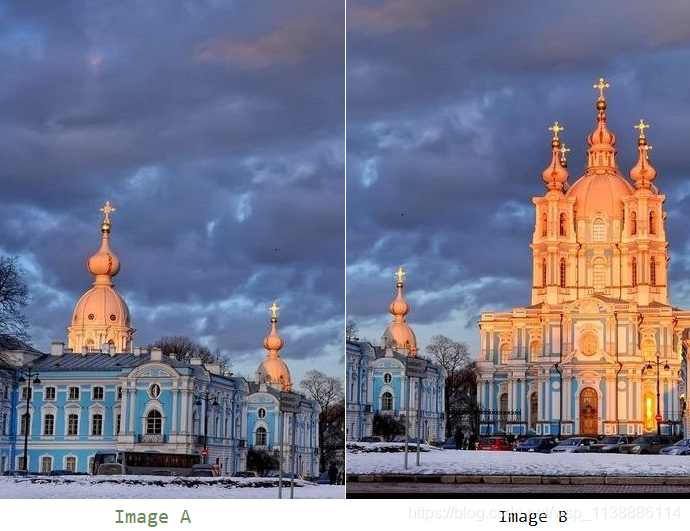
原始图:
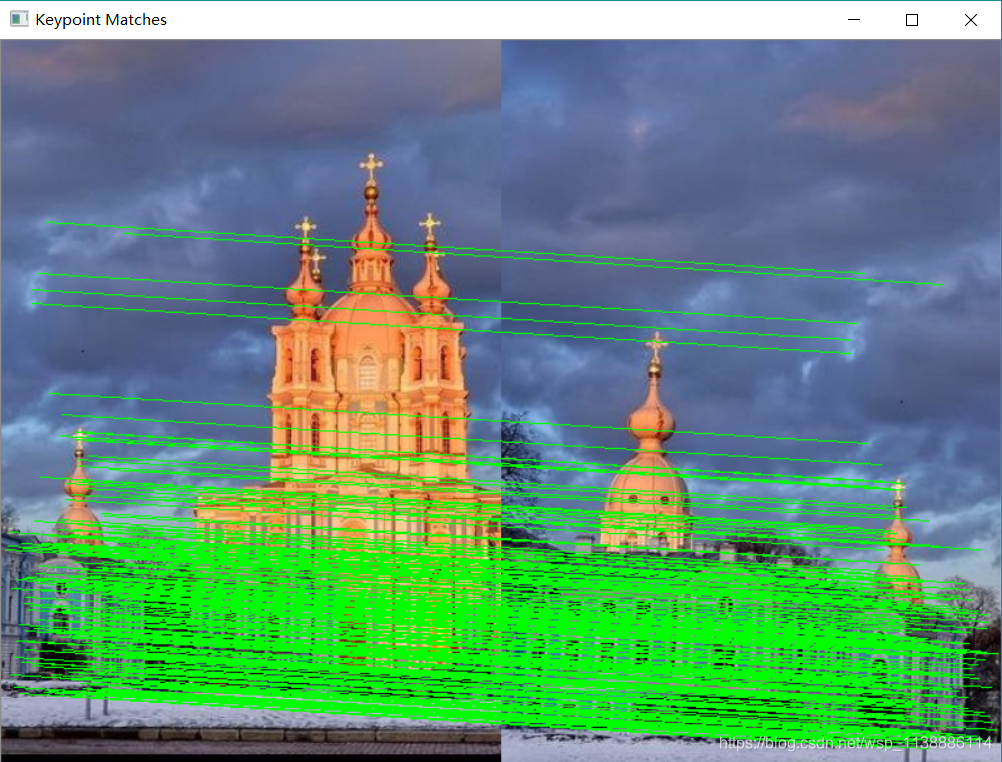
匹配特征点:
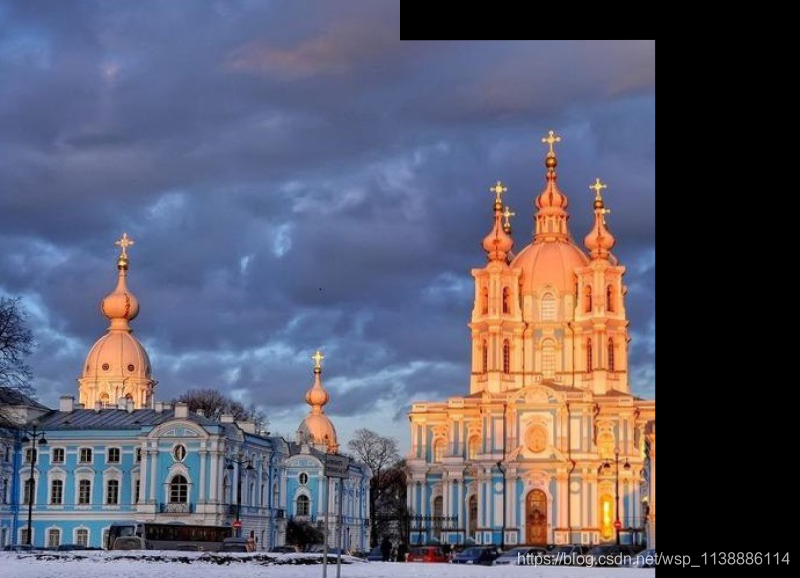
拼接后: