1:名词解释:probability grid map
地图是经过栅格化的地图,且地图中的每个像素值用概率来表示。
p = 1,表示被占据;
p = 0.5,表示未知,地图初始化的时候,每个栅格可以初始化为0.5;
p = 0.0,表示free,即确定没有障碍物。
2:如何更新每个栅格的概率
使用赔率(odd)来更新栅格的概率值。如果被激光击中(hit),则概率值会增大;如果被激光穿透(miss),则概率值会减小。
注意:每次更新栅格概率,只更新当前激光看到的栅格。
3:更新公式
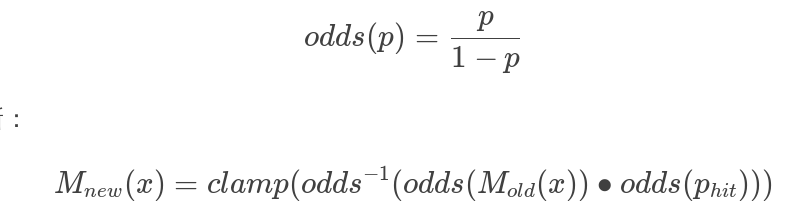
注意: 表示更新后的概率值,
表示更新后的概率值, 表示
表示 ,即求概率的逆过程。
,即求概率的逆过程。