历途高楼外墙清洗机器人到底是好在哪里呢?在即将推向市场的日子里小编逐渐给大家进行解密。
话说30年前就有前辈提出来自动清洗高楼的概念,无数科技从业者日夜探索,为何最近几年才迎来突破,今天我们先从AI分析一下,到这里如果您是专业AI人员又有自己非常独特的见解可以不必往下看了,因为AI本来有一部分就是黑盒子,仁者见仁的事儿。
高空作业,在人体工程学方面来讲首先就是一个不太可控的工作、也是不太符合人类的生存条件的工作,这也就不难理解众多从业者做科研30年了。以前的技术思路中遥控器控制占据优势地位,但在百米高空,人眼很难分辨出来三维信息,这样就使遥控器无法指导机械工作,多年来没有太大的突破也就顺理成章了。
机器视觉的逐渐成熟为高楼外墙清洗机器人的成功提供了非常重要的先决条件,历途在项目研发之初就将机器视觉做为机器人的眼睛放在了最重要的位置,看得清看得准是机器人能往下进行的最主要的技术之一。
历途机器视觉Team用了3年时间做了很多工作,下面和大家分享一点我们的技术路线。
下面这张贴图是我们的技术做的IMU算法的汇报:

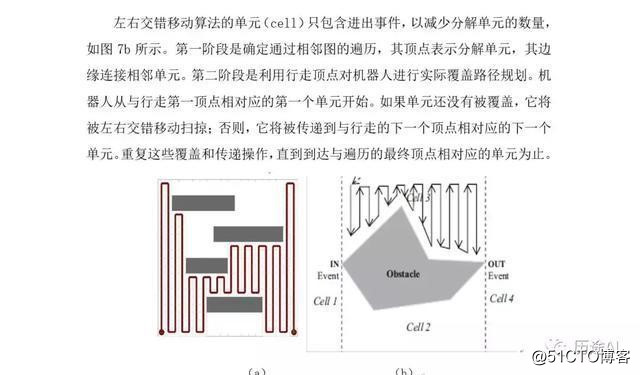
依托于视觉SLAM的遍历路径示例:
基于若干这样等技术,历途让机器人的眼睛看得见,看得清。今天就先和大家分享到这里,想知道更多关于历途机器人的技术解密,请大家继续关注历途机器人。