参考博客:https://blog.csdn.net/vinceee__/article/details/83044037
参考博客:https://blog.csdn.net/wi162yyxq/article/details/71514423
在BSTree中,节点分割的是一维数轴,那么在二维中,节点分割为平面了,就像这样:
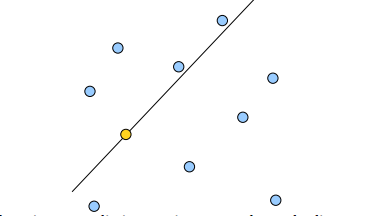
黄色的点作为根节点,上面的点归左子树,下面的点归右子树,接下来再不断地划分,最后得到一棵树就是的BSPTree(binary space partitioning tree). 分割的那条线叫做分割超平面(splitting hyperplane),在一维中是一个点,二维中是线,三维的是面。
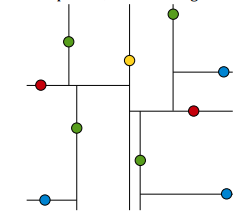
KDTree就是超平面都垂直于轴的BSPTree。同样的数据集,用KDTree划分之后就是这样:
KdTree 是以二叉搜索树(Binary Search Tree)为原型的用于空间检索的数据结构,能够在随机分布的空间内以 O(log2N) 的时间复杂度实现对平面内点的搜索以及 O(log2N) + R 的复杂度查询平面内任意矩形内的所有点(R为矩形内点的个数)。 KdTree的应用十分广泛,包括且不限于范围搜索,最邻近点搜索,物理引擎中的碰撞检测以及地理节点(如外卖商家)数据库等。
原理简介
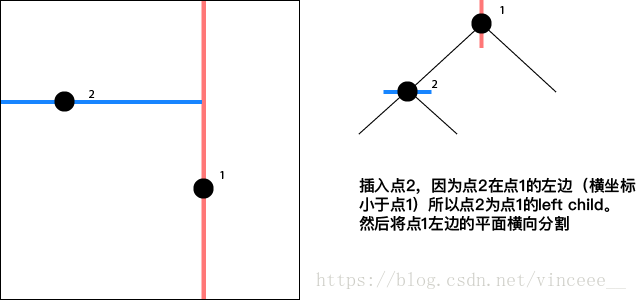
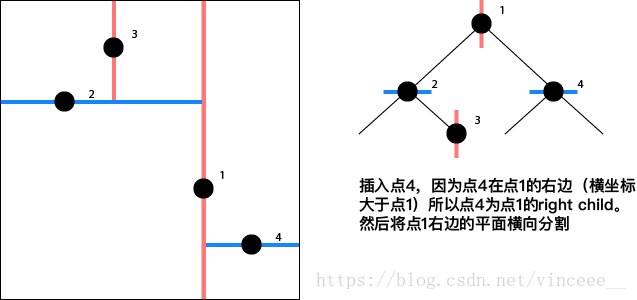
KdTree的实现方法与BST十分相似,以最常用的二维平面的KdTree为例,其每个节点存储一个二维的坐标点,并将平面空间以该点所在的横线/竖线递归地分割成两个子空间。
以width = 1.0, height = 1.0的单位平面为例,依次插入下列点


Note:
点对平面的分割方式是横向/纵向按照层次交替出现(根节点是哪个方向都可以)。
插入节点的方法类似于BST,即从根节点开始,(设要插入的节点为Pinsert,当前遍历的节点为Pcurrent)如果Pinsert在Pcurrent的左边或者下边,那么就访问Pcurrent的left child, 反之访问right child直到成为叶子节点。
本KdTree不支持删除操作。
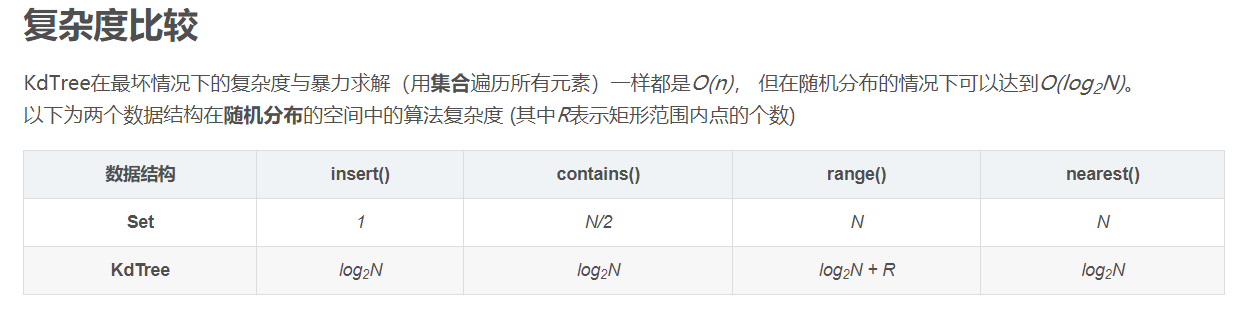
复杂度比较
KdTree在最坏情况下的复杂度与暴力求解(用集合遍历所有元素)一样都是O(n), 但在随机分布的情况下可以达到O(log2N)。
以下为两个数据结构在随机分布的空间中的算法复杂度 (其中R表示矩形范围内点的个数)