环境:
python3.7+opencv3.4.1
IDE:Win10+eclipse
一、示例一
修改后的源码:
import cv2
import numpy as np
from matplotlib import pyplot as plt
img_L = cv2.imread('left.jpg', 0)
img_R = cv2.imread('right.jpg', 0)
stereo = cv2.StereoBM_create(
numDisparities=16, blockSize=15) # OpenCV 3.0的函数为StereoBM_create
disparity = stereo.compute(img_L, img_R)
plt.subplot(121), plt.imshow(img_L, 'gray'), plt.title(
'img_left'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(disparity, 'gray'), plt.title(
'disparity'), plt.xticks([]), plt.yticks([])
plt.show()
运行效果:

遇见问题:
报错:AttributeError: module 'cv2.cv2' has no attribute 'createStereoBM'
解决方法:
第一步:
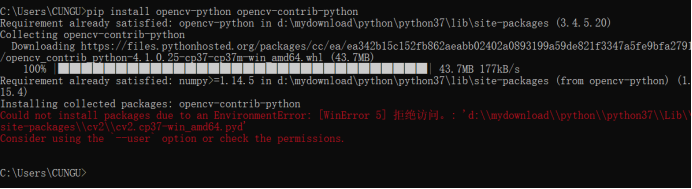
pip install opencv-python opencv-contrib-python
下载完成但安装不成功
解决方法:以管理员身份运行cmd安装:
pip install --user opencv-contrib-python
第二步:
把createStereoBM(opencv2.7版本)改为StereoBM_create(opencv3.4)



二、示例二

修改后的源码:
import numpy as np
import cv2
from matplotlib import pyplot as plt
IMAGE_WIDTH = 800
IMAGE_HEIGHT = 600
capL = cv2.VideoCapture(2)
capR = cv2.VideoCapture(0)
imgL = np.zeros((IMAGE_WIDTH, IMAGE_HEIGHT, 3), np.uint8)
imgR = np.zeros((IMAGE_WIDTH, IMAGE_HEIGHT, 3), np.uint8)
stereo = None
opencv_measure_version = int(cv2.__version__.split('.')[0])
windowSize = 5
minDisp = 10
numDisp = 250 - minDisp
# for OpenCV3
stereo = cv2.StereoSGBM_create(
minDisparity=minDisp,
numDisparities=numDisp,
blockSize=16,
P1=8 * 3 * windowSize**2,
P2=32 * 3 * windowSize**2,
disp12MaxDiff=1,
uniquenessRatio=10,
speckleWindowSize=100,
speckleRange=32
)
capL.set(cv2.CAP_PROP_FRAME_WIDTH, IMAGE_WIDTH)
capL.set(cv2.CAP_PROP_FRAME_HEIGHT, IMAGE_HEIGHT)
capR.set(cv2.CAP_PROP_FRAME_WIDTH, IMAGE_WIDTH)
capR.set(cv2.CAP_PROP_FRAME_HEIGHT, IMAGE_HEIGHT)
imgL = cv2.imread('left.jpg')
imgR = cv2.imread('right.jpg')
# create gray images
imgGrayL = cv2.cvtColor(imgL, cv2.COLOR_BGR2GRAY)
imgGrayR = cv2.cvtColor(imgR, cv2.COLOR_BGR2GRAY)
# calculate histogram
imtGrayL = cv2.equalizeHist(imgGrayL)
imtGrayR = cv2.equalizeHist(imgGrayR)
# through gausiann filter
imgGrayL = cv2.GaussianBlur(imgGrayL, (5, 5), 0)
imgGrayR = cv2.GaussianBlur(imgGrayR, (5, 5), 0)
plt.subplot(131), plt.imshow(imgGrayL, 'gray'), plt.title(
'image left'), plt.xticks([]), plt.yticks([])
plt.subplot(132), plt.imshow(imgGrayR, 'gray'), plt.title(
'image right'), plt.xticks([]), plt.yticks([])
# calculate disparity
disparity = stereo.compute(imgGrayL, imgGrayR).astype(np.float32) / 16
disparity = (disparity - minDisp) / numDisp
plt.subplot(133), plt.imshow(disparity, 'gray'), plt.title(
'disparity'), plt.xticks([]), plt.yticks([])
plt.show()
运行结果:
