1、相机标定的意义
在机器视觉领域,相机的标定是一个关键的环节,它决定了机器视觉系统能否有效的定位,能否有效的计算目标物。每个镜头的在生产和组装过程中的畸变程度各不相同,通过相机标定可以校正这种镜头畸变,生成矫正后的图像——矫正透镜畸变;相机的标定基本上可以分为两种,第一种是相机的自标定;第二种是依赖于标定参照物的标定方法。前者是相机拍摄周围物体,通过数字图像处理的方法和相关的几何计算得到相机参数,但是这种方法标定的结果误差较大,不适合于高精度应用场合。后者是通过标定参照物,由相机成像,并通过数字图像处理的方法,以及后期的空间算术运算计算相机的内参和外参。
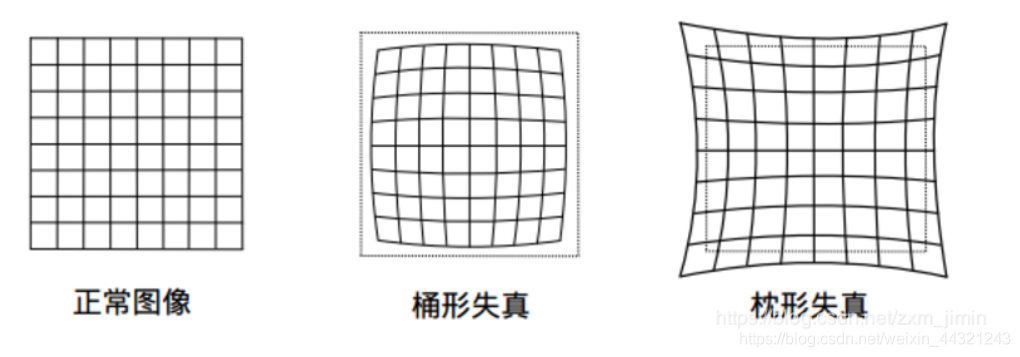
相机在出厂之前都需要进行相机标定,用软件的方法校正生成的图像,避免拍摄出的图像产生桶形和枕形畸变;
2.相机内参矩阵原理
详见 https://www.cnblogs.com/Jessica-jie/p/6596450.html
摄像机模型
Pinhole Camera模型如下图所示:
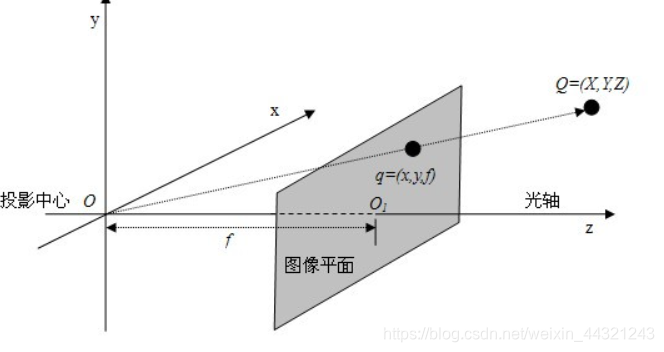
这是一个小孔成像的模型,其中:
1.O点是相机的中心点,也是相机坐标系的中心点;
2.z轴表示相机的主轴;
3.q点所在的平面表示相机的像平面,即图片坐标系所在的二维平面;
4.O1点表示主点,主轴与像平面相交的点;
5.O点到O1点的距离,即相机的焦距f;
6.像平面上的x和y坐标轴是与相机坐标系上的X和Y坐标轴互相平行的;
7.相机坐标系是以X,Y,Z(大写)三个轴组成的且原点在O点,度量值为米(m);
成像平面坐标系(相机坐标系)
[1]以O点为原点建立摄像机坐标系。点Q(X,Y,Z)为摄像机坐标系空间中的一点,该点被光线投影到图像平面上的q(x,y,f)点。
图像平面与光轴z轴垂直,和投影中心距离为f (f是相机的焦距)。按照三角比例关系可以得出:
x/f = X/Z y/f = Y/Z ,即 x = fX/Z y = fY/Z
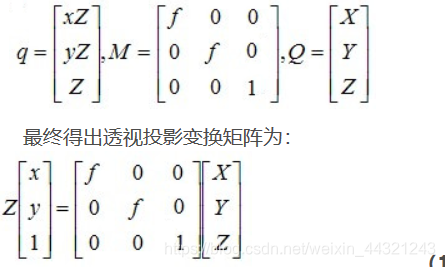
以上将坐标为(X,Y,Z)的Q点映射到投影平面上坐标为(x,y)的q点的过程称作投影变换。
上述Q点到q点的变换关系用3*3的矩阵可表示为:q = MQ ,其中
3.张正友标定法
详见 https://blog.csdn.net/JennyBi/article/details/85764988#相机标定的原理
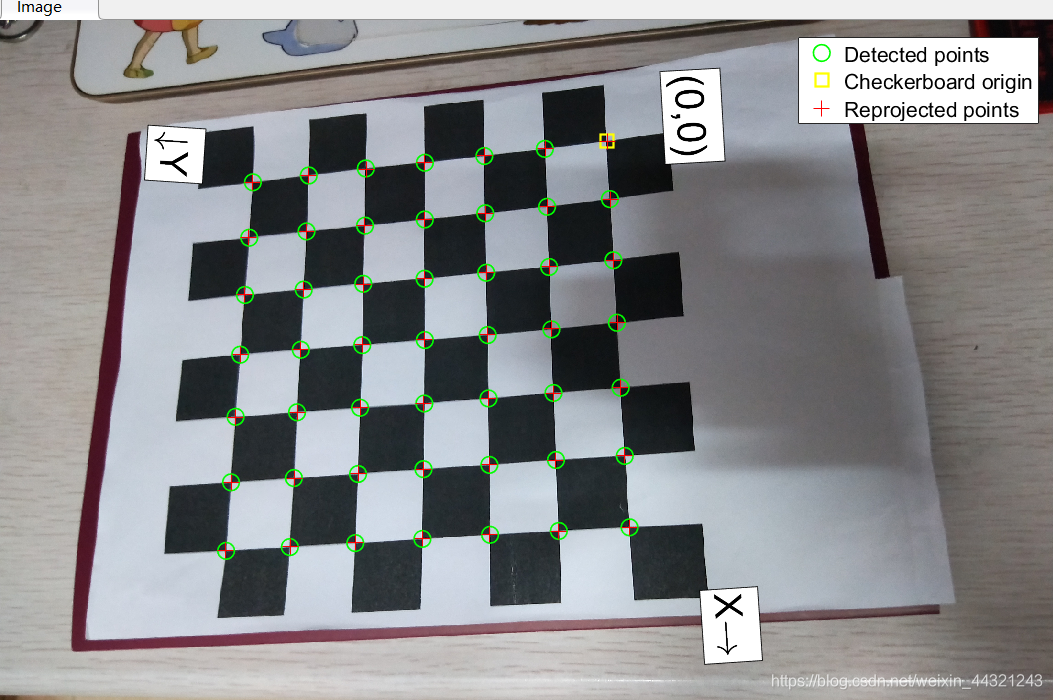
用一块由黑白方块间隔组成的棋盘标定板来作为相机标定的标定物,如图
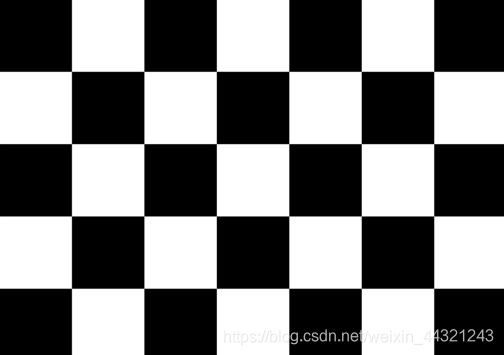
标定图片需要使用标定板在不同位置、不同角度、不同姿态下拍摄,最少需要3张,以10~20张为宜。
步骤:
1、从照片中提取棋盘格角点。
2、估算理想无畸变的情况下,五个内参和六个外参。
3、应用最小二乘法估算实际存在径向畸变下的畸变系数。
4、极大似然法,优化估计,提升估计精度.
计算内参和外参的初值
1、计算单应性矩阵H
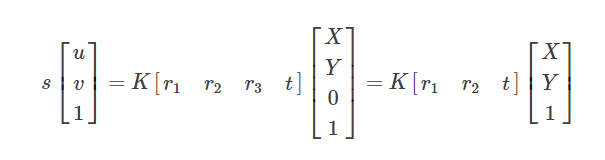
棋盘格平面到图像平面的单应性关系为:
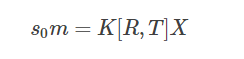
其中s为尺度因子,K为摄像机内参数,R为旋转矩阵,T为平移向量。令
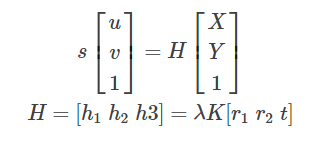
s对于齐次坐标来说,不会改变齐次坐标值。张氏标定法中,将世界坐标系狗仔在棋盘格平面上,令棋盘格平面为Z=0的平面。则可得
我们把K[r1, r2, t]叫做单应性矩阵H,即
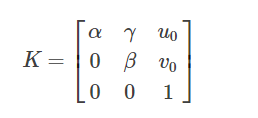
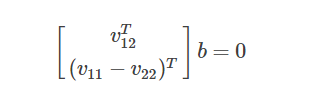
2、计算内参数矩阵
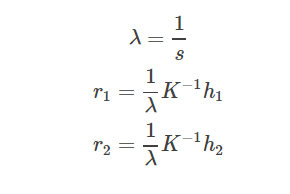
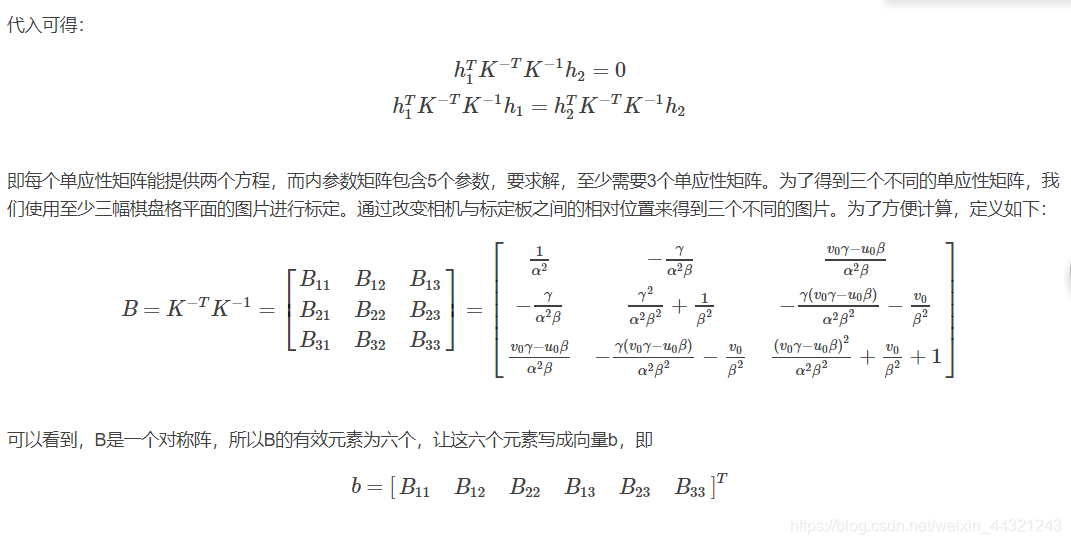
 利用约束条件可以得到:
利用约束条件可以得到:
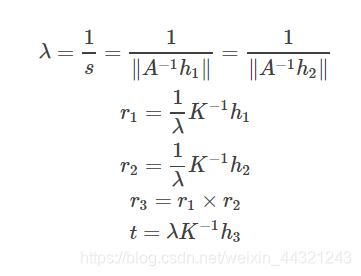
3、计算外参数矩阵
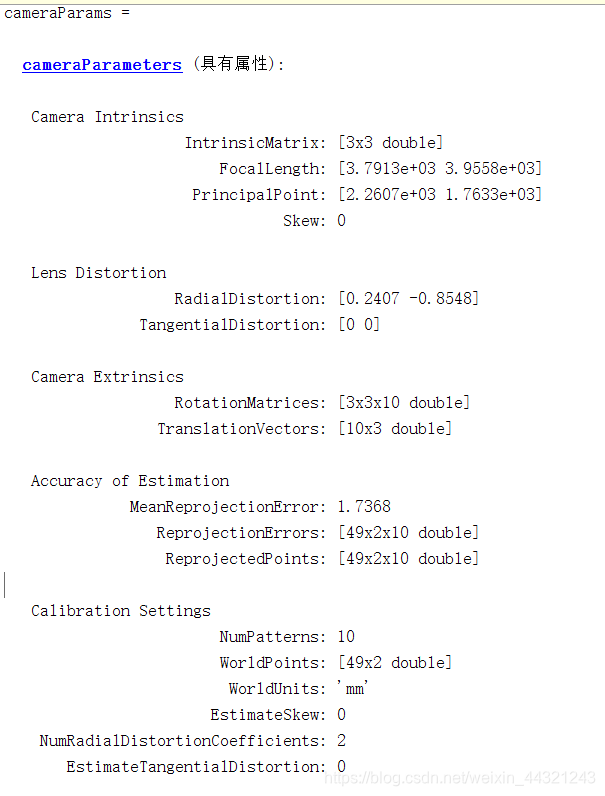
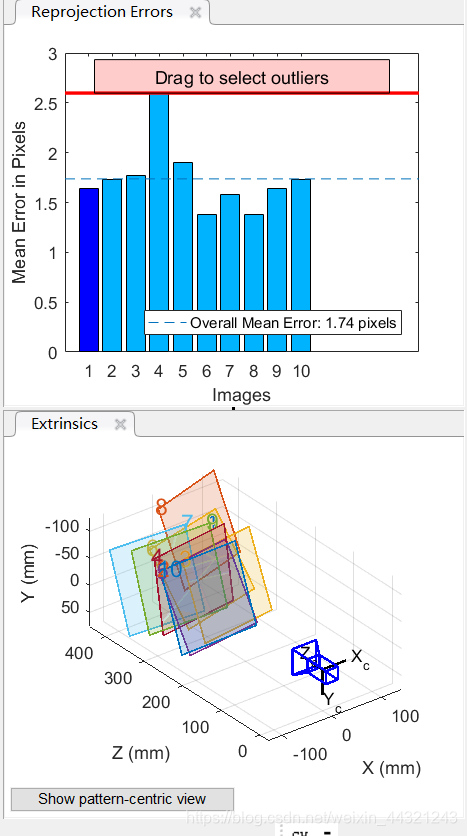
3.实验过程 :matlab实现
结果参数: