博主github:https://github.com/MichaelBeechan
博主CSDN:https://blog.csdn.net/u011344545
OF-VO:Robust and Efficient Stereo Visual Odometry Using Points and Feature Optical Flow
代码:https://github.com/MichaelBeechan/MyStereoLibviso2
SLAM框架

RGB-D SLAM开源
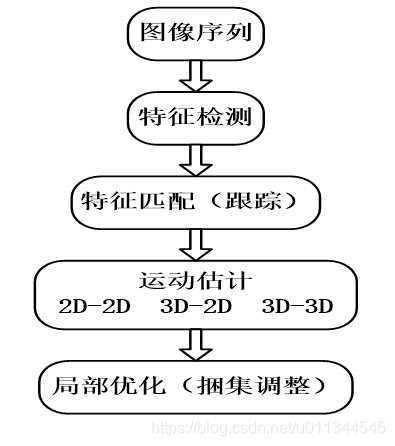
SLAM 主要分为两个部分:前端和后端,前端也就是视觉里程计(VO),它根据相邻图像的信息粗略的估计出相机的运动,给后端提供较好的初始值。VO的实现方法可以根据是否需要提取特征分为两类:基于特征点的方法,不使用特征点的直接方法。 基于特征点的VO运行稳定,对光照、动态物体不敏感。
视觉里程计框架
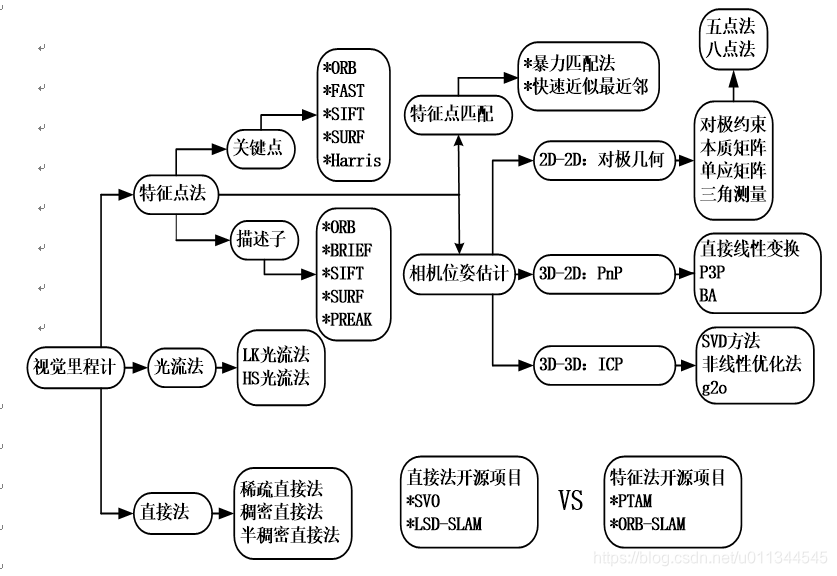
视觉里程计主要研究方法
视觉里程计发展状况

主要视觉里程计代码及论文
SVO: Fast Semi-Direct Monocular Visual Odometry
论文:http://rpg.ifi.uzh.ch/docs/ICRA14_Forster.pdf
代码:https://github.com/uzh-rpg/rpg_svo
Robust Odometry Estimation for RGB-D Cameras
Real-Time Visual Odometry from Dense RGB-D Images
论文:http://www.cs.nuim.ie/research/vision/data/icra2013/Whelan13icra.pdf
代码:https://github.com/tum-vision/dvo
Parallel Tracking and Mapping for Small AR Workspaces
论文:https://cse.sc.edu/~yiannisr/774/2015/ptam.pdf
http://www.robots.ox.ac.uk/ActiveVision/Papers/klein_murray_ismar2007/klein_murray_ismar2007.pdf
代码:https://github.com/Oxford-PTAM/PTAM-GPL
ORBSLAM
代码:https://github.com/raulmur/ORB_SLAM2
https://github.com/raulmur/ORB_SLAM
A ROS Implementation of the Mono-Slam Algorithm
论文:https://www.researchgate.net/publication/269200654_A_ROS_Implementation_of_the_Mono-Slam_Algorithm
代码:https://github.com/rrg-polito/mono-slam
DTAM: Dense tracking and mapping in real-time
论文:https://ieeexplore.ieee.org/document/6126513
代码:https://github.com/anuranbaka/OpenDTAM
LSD-SLAM: Large-Scale Direct Monocular SLAM
论文:http://pdfs.semanticscholar.org/c13c/b6dfd26a1b545d50d05b52c99eb87b1c82b2.pdf
https://vision.in.tum.de/research/vslam/lsdslam
代码:https://github.com/tum-vision/lsd_slam
MSCKF_VIO:Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight
论文:https://arxiv.org/abs/1712.00036
代码:https://github.com/KumarRobotics/msckf_vio
LIBVISO2: C++ Library for Visual Odometry 2
论文:http://www.cvlibs.net/software/libviso/
代码:https://github.com/srv/viso2
Stereo Visual SLAM for Mobile Robots Navigation
A constant-time SLAM back-end in the continuum between global mapping and submapping: application to visual stereo SLAM
论文:http://mapir.uma.es/famoreno/papers/thesis/FAMD_thesis.pdf
代码:https://github.com/famoreno/stereo-vo
Combining Edge Images and Depth Maps for Robust Visual Odometry
Robust Edge-based Visual Odometry using Machine-Learned Edges(REVO)
论文:https://graz.pure.elsevier.com/
代码:https://github.com/fabianschenk/REVO
HKUST Aerial Robotics Group
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
论文:https://arxiv.org/pdf/1708.03852.pdf
代码:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
VINS-Fusion:Online Temporal Calibration for Monocular Visual-Inertial Systems
论文:https://arxiv.org/pdf/1808.00692.pdf
代码;https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
Monocular Visual-Inertial State Estimation for Mobile Augmented Reality
论文:https://ieeexplore.ieee.org/document/8115400
代码:https://github.com/HKUST-Aerial-Robotics/VINS-Mobile
VINet: Visual-Inertial Odometry as a Sequence-to-Sequence Learning Problem
论文:https://arxiv.org/abs/1701.08376
代码:https://github.com/HTLife/VINet
Computer Vision Group TUM Department of Informatics Technical University of Munich
DSO: Direct Sparse Odometry
代码;https://github.com/JingeTu/StereoDSO
Visual-Inertial DSO:https://vision.in.tum.de/research/vslam/vi-dso
DVSO:https://vision.in.tum.de/research/vslam/dvso
DSO with Loop-closure and Sim(3) pose graph optimization:https://vision.in.tum.de/research/vslam/ldso
Stereo odometry based on careful feature selection and tracking
论文:https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7324219
代码:https://github.com/Mayankm96/Stereo-Odometry-SOFT
OKVIS: Open Keyframe-based Visual-Inertial SLAM
代码:https://github.com/gaoxiang12/okvis
Trifo-VIO: Robust and Efficient Stereo Visual Inertial Odometry using Points and Lines
论文:https://arxiv.org/pdf/1803.02403.pdf
代码:https://github.com/UMiNS/Trifocal-tensor-VIO
PL-VIO: Tightly-Coupled Monocular Visual–Inertial Odometry Using Point and Line Features
论文:https://www.mdpi.com/1424-8220/18/4/1159/html
A Review of Visual-Inertial Simultaneous Localization and Mapping from Filtering-Based and Optimization-Based Perspectives:视觉惯导的综述性文章