AVS2配置文件中有这一项:
FME: =3 #Fast Motion Estimation method (1:DIA, 2:HEX,3:UMH,4:TZ)
表示采用不同的运动搜索方法,下面简单的介绍一下这几种方法。
0.ESA.全像素运动估计搜索算法(不使用)
这个很简单。在规定范围内(通常是正方形)按照块为单位把匹配块全部都搜一遍,哪个差值最小用哪个,超出的部分一般是和边界一样的。这个速度太慢,很少使用,但是精确率最高。这个是最基础的全搜索,下面的搜索模式是只搜索某些点,在性能基本不损失的情况下,加快了搜索速度,属于快速搜索。
1.DIA:diamond钻石菱形搜索 :
这种搜索需要一种形状的搜索窗 -- 小菱形。先以当前为中心点菱形范围内搜索一遍,若当前中心点为最优点,则搜索结束;否则以最优点为中心再搜一遍,直到中心点为最优点为止。这种方法会对高质量视频有影响,搜不到一些点。

2.HEX:六边形搜索算法:
这种搜索需要三个不同形状的搜索窗,包括大六边形、小菱形、小正方形,依次按照上述不同搜索形状进行搜索,先搜大六边形的,如果中心点为最优,则再搜索小菱形的,否则,以最优点为中心点再搜一次大六边形;若菱形搜索中中心点最优,再搜索小正方形的,最终搜到的点则为最优点,以此类推。

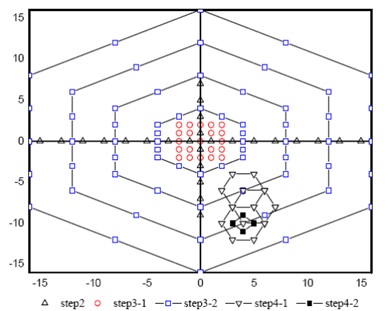
3.UMH:不对称六边形搜索 :
这种搜索的搜索窗比较复杂,包括了非对称十字搜索,5x5步全搜索,融合了钻石算法和六边形算法的特征,目前搜索效率最高;同时不对称指的是不同方向的半径不同,原因是水平方向的运动通常多于大于垂直方向上的运动,之所以这样设计是为了避免错过一些搜索点。
搜索步骤:
step1:用小菱形、中菱形、正八边形等搜索模板和一些门限值,得到一个初始的搜索点。
step2:不对称十字形搜索,横向搜索步长为纵向步长2倍,最优点为中心点到下一步,否则重复当前
step3-1:5x5步长全搜索,最优点为中心点到下一步,否则重复当前
step3-2: 非对称六边形搜索,最优点为中心点到下一步,否则重复当前
step4-1:六边形搜索,最优点为中心点到下一步,否则重复当前
step4-2: 小菱形搜索,最优点为中心点到下一步,否则重复当前
4.TZ:exhaustive变换的穷尽搜索:
1.在mvp中的candidates中找到差值最小的起始搜索点
2.步长是变化的,从1开始,以2的指数递增,进行8点钻石搜索(上下左右+中点),同时不能大于最大搜索次数
3.如果步骤2搜到的最佳步长为1,再做一次补充的两点钻石搜索,因为步骤2不会搜到
4.如果步骤2的步长大于阈值,则在步长范围内全搜索
5.以找到的最优点为起始点,重复步骤2,3直到找到最优点

另外,整像素搜索以后还会进行1/2或者1/4的分像素运动搜索,有出入请指正。