所需器材有:树莓派及其电源,usb摄像头,路由器,两台伺服舵机及其外壳,一台笔记本,一根网线
- 树莓派的基本操作及学习网站与资料
- 树莓派实验室
- 树莓派3代入门资料及安装教程
按照以上操作初始化树莓派
- 树莓派控制摄像头进行视频流传输,并在pc端接收视频
- 推荐使用MJPG-streamer,在gitHub上面是一个开源的项目.
- 在树莓派上面安装如下库:
- sudo apt-get update
- sudo apt-get install subversion
- sudo apt-get install libjpeg8-dev
- sudo apt-get install imagemagick
- sudo apt-get install libv4l-dev
- sudo apt-get install cmake
- sudo apt-get install git
- 使用git将远端项目pull到本地
- sudo git clone https://github.com/jacksonliam/mjpg-streamer.git
- 编译
- cd mjpg-streamer/mjpg-streamer-experimental
- make all
- sudo make install
- 使用
- ./start.sh
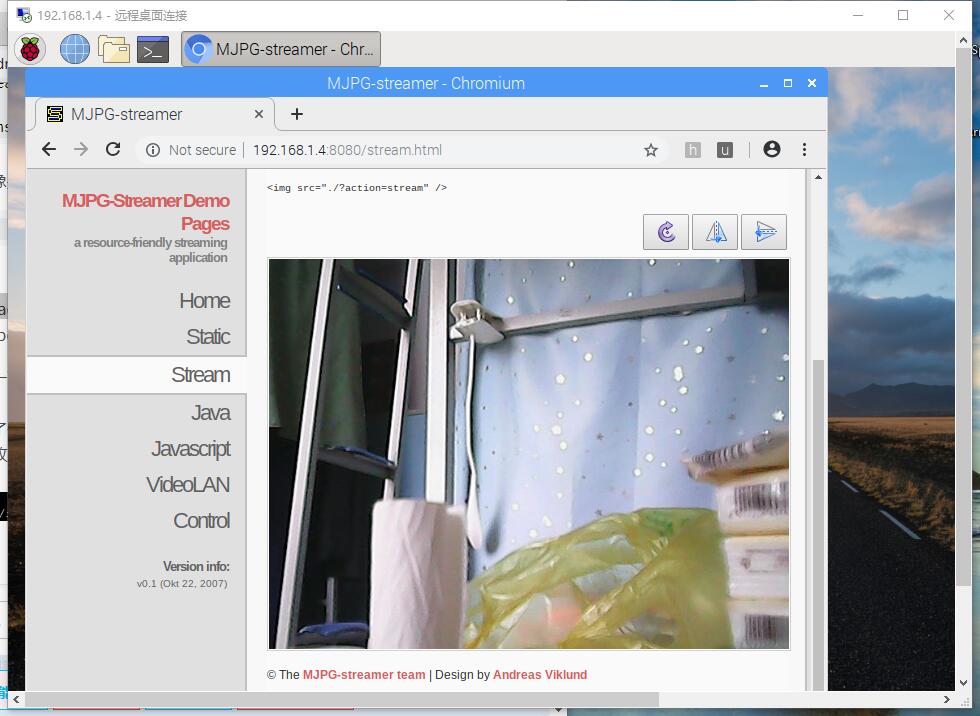
- 如果可以以桌面化的形式在pc上打开树莓派系统,那么可以在树莓派系统的浏览器输入http://raspberry-ip-address:8080/,即可以看见摄像头采集的视频信息
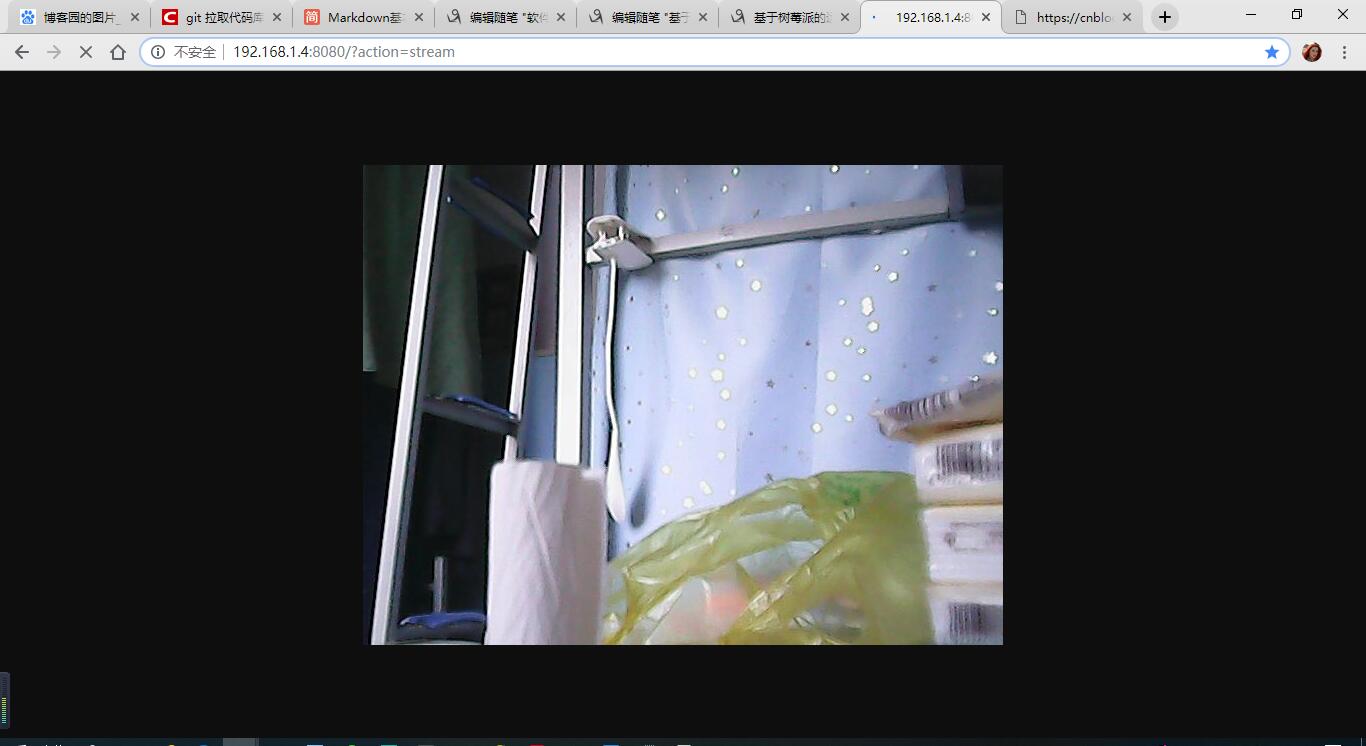
- 如果没有以桌面化的形式打开树莓派,可以在pc上的浏览器中输入http://raspberry-ip-address/?action=stream,也可看见树莓派采集的信息。raspberry-ip-address表示的是局域网中树莓派的ip地址
- python通过GPIO控制舵机云台的转动
代码如下:
(```)
import RPi.GPIO as GPIO
import time
import signal
import atexitimport os
import sys
import tty, termiosatexit.register(GPIO.cleanup)
servopin = 22
servopin2 = 21
GPIO.setmode(GPIO.BCM)
GPIO.setup(servopin, GPIO.OUT, initial=False)
p = GPIO.PWM(servopin, 50)
p.start(0)GPIO.setup(servopin2, GPIO.OUT, initial=False)
p2 = GPIO.PWM(servopin2, 50)
p2.start(0)
time.sleep(2)i = 0
j = 0
while True:
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(fd)
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
if ch == 'a':
(```)
基于树莓派的远程可控无线网络摄像头的设计与实现
猜你喜欢
转载自www.cnblogs.com/sunshine-free/p/10709998.html
今日推荐
周排行