最近在学习cmake,在完整看了《cmake实践》一书后,跟着书上例程敲了跑了一遍,也写了几篇相关读书笔记,算是勉强基本入门了。所以找了usb_cam软件包的CMakeLists.txt来进一步学习,在看懂这个例子之后,准备写篇博客记录一下,若有谬误还望指正。
1 usb_cam软件包简介
现在市面上最常见的还是USB摄像头,物美价廉,要想使USB摄像头在ROS下正常工作,我们就需要一个软件包来支持,现在ROS下最常用的usb摄像头软件包就是usb_cam,简单理解该软件包就是V4L(Video for Linux)USB摄像头驱动在ROS在的一个移植版本。
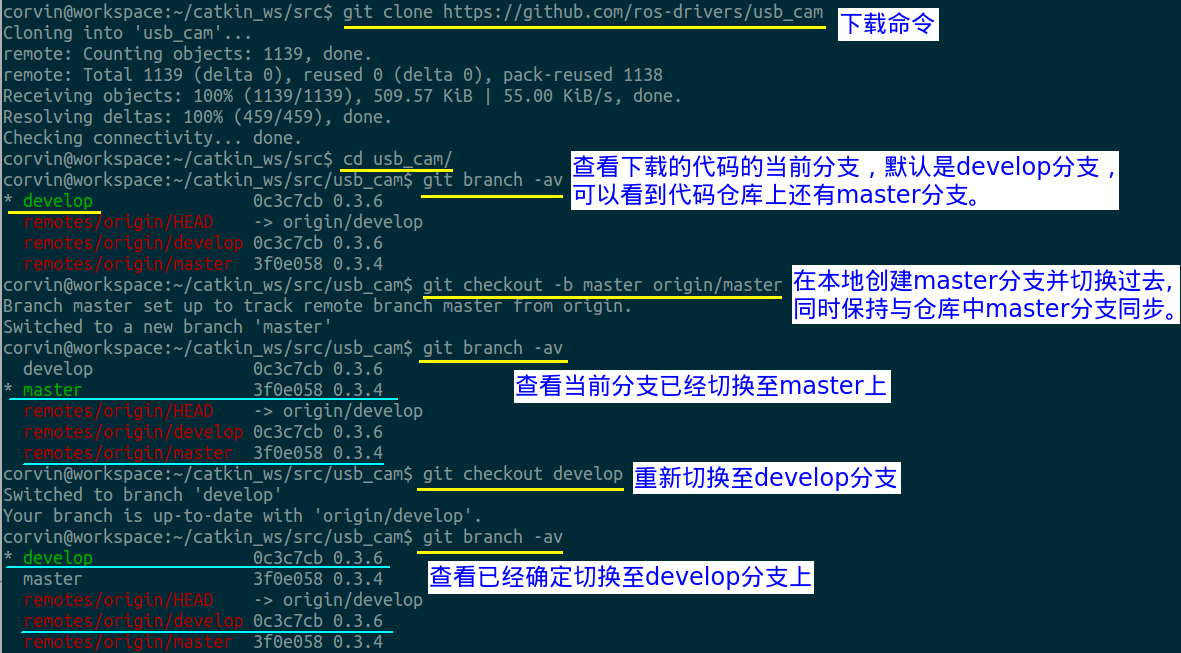
下面我们在github上来下载该源码,github上的usb_cam源码网址如下:
https://github.com/ros-drivers/usb_cam
通过下图来查看整个下载操作流程:
下面来查看usb_cam源码介绍:
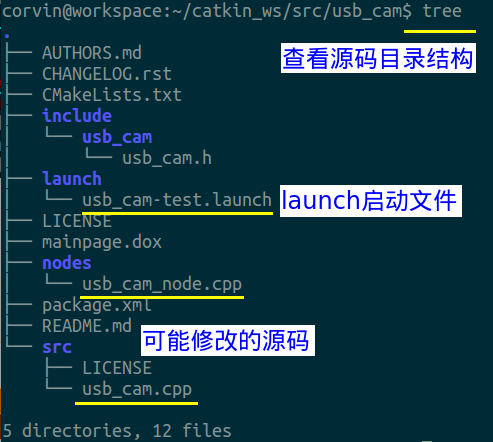
2 源码剖析
下载好源码后,找到CMakeFiles.txt文件,修改添加注释后的内容如下:
#检查cmake的版本,要求至少为2.8.3
cmake_minimum_required(VERSION 2.8.3)
#定义工程名为usb_cam
project(usb_cam)
#搜索外部库(包)catkin,并在后面列出了与 catkin包 相关的一些部件清单
find_package(catkin REQUIRED COMPONENTS image_transport roscpp std_msgs std_srvs sensor_msgs camera_info_manager)
#先搜索cmake自己的PkgConfig模块,才能使用pkg_check_modules
find_package(PkgConfig REQUIRED)
#pkg_check_module与find_package功能基本一直,也是搜索外部库
pkg_check_modules(avcodec libavcodec REQUIRED) #libavcodec库用于读取视频文件
pkg_check_modules(swscale libswscale REQUIRED) #libswscale库用于各种图像像素格式的转换
#catkin_package 宏是 catkin 的宏之一,声明要传递给依赖项目的内容,生成 cmake 配置文件。
catkin_package(
INCLUDE_DIRS include
LIBRARIES ${PROJECT_NAME}
)
#用来向工程添加多个头文件搜索路径
include_directories(
include
${catkin_INCLUDE_DIRS}
${avcodec_INCLUDE_DIRS}
${swscale_INCLUDE_DIRS}
)
#将指定的源文件usb_cam.cpp生成链接库文件,然后添加到工程中去
add_library(${PROJECT_NAME} src/usb_cam.cpp)
#用来向工程usb_cam添加多个链接库
target_link_libraries(${PROJECT_NAME}
${catkin_LIBRARIES}
${avcodec_LIBRARIES}
${swscale_LIBRARIES}
)
##生成一个名为usb_cam_node的可执行文件,其对应源文件是nodes/usb_cam_node.cpp
add_executable(${PROJECT_NAME}_node nodes/usb_cam_node.cpp)
#用来向可执行文件usb_cam_node添加多个链接库
target_link_libraries(${PROJECT_NAME}_node
${PROJECT_NAME}
${avcodec_LIBRARIES}
${swscale_LIBRARIES}
${catkin_LIBRARIES}
)
#可执行文件usb_cam_node安装到CATKIN的BIN目录下 (在可执行文件链接了外部库后)
#静态库usb_cam安装到CATKIN的LIB目录下 (在工程链接了外部库后)
install(TARGETS ${PROJECT_NAME}_node ${PROJECT_NAME}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
)
#在/launch目录下安装一个启动文件
install(DIRECTORY launch/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/launch
FILES_MATCHING PATTERN "*.launch"
)
#在catkin的include目录下安装include/usb_cam目录下的所有内容
install(DIRECTORY include/${PROJECT_NAME}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.h" PATTERN "*.hpp"
)具体的分析已在注释中详细说明了,有些不明白的可以参考我的另一篇博客 - CMake学习笔记三:cmake 常用指令 。