详细可以参考:
STM32使用HAL库操作外部中断——实战操作
https://www.cnblogs.com/wt88/p/9624103.html
/** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** ** This notice applies to any and all portions of this file * that are not between comment pairs USER CODE BEGIN and * USER CODE END. Other portions of this file, whether * inserted by the user or by software development tools * are owned by their respective copyright owners. * * COPYRIGHT(c) 2019 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "stm32f4xx_hal.h" #include "gpio.h" /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_NVIC_Init(void); /* USER CODE BEGIN PFP */ /* Private function prototypes -----------------------------------------------*/ void Toggle_LED(void); /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * * @retval None */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); /* Initialize interrupts */ MX_NVIC_Init(); /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct; RCC_ClkInitTypeDef RCC_ClkInitStruct; /**Configure the main internal regulator output voltage */ __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); /**Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 4; RCC_OscInitStruct.PLL.PLLN = 168; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 4; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } /**Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } /**Configure the Systick interrupt time */ HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); /**Configure the Systick */ HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); /* SysTick_IRQn interrupt configuration */ HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0); } /** * @brief NVIC Configuration. * @retval None */ static void MX_NVIC_Init(void) { /* EXTI15_10_IRQn interrupt configuration */ HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0); HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); } /* USER CODE BEGIN 4 */ void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if(GPIO_Pin == GPIO_PIN_10) { Toggle_LED(); } } void Toggle_LED(void) { HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_12); HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_13); HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_14); HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_15); } /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @param file: The file name as string. * @param line: The line in file as a number. * @retval None */ void _Error_Handler(char *file, int line) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ while(1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/** ****************************************************************************** * @file stm32f4xx_it.c * @brief Interrupt Service Routines. ****************************************************************************** * * COPYRIGHT(c) 2019 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "stm32f4xx_hal.h" #include "stm32f4xx.h" #include "stm32f4xx_it.h" /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /* External variables --------------------------------------------------------*/ /******************************************************************************/ /* Cortex-M4 Processor Interruption and Exception Handlers */ /******************************************************************************/ /** * @brief This function handles Non maskable interrupt. */ void NMI_Handler(void) { /* USER CODE BEGIN NonMaskableInt_IRQn 0 */ /* USER CODE END NonMaskableInt_IRQn 0 */ /* USER CODE BEGIN NonMaskableInt_IRQn 1 */ /* USER CODE END NonMaskableInt_IRQn 1 */ } /** * @brief This function handles Hard fault interrupt. */ void HardFault_Handler(void) { /* USER CODE BEGIN HardFault_IRQn 0 */ /* USER CODE END HardFault_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_HardFault_IRQn 0 */ /* USER CODE END W1_HardFault_IRQn 0 */ } /* USER CODE BEGIN HardFault_IRQn 1 */ /* USER CODE END HardFault_IRQn 1 */ } /** * @brief This function handles Memory management fault. */ void MemManage_Handler(void) { /* USER CODE BEGIN MemoryManagement_IRQn 0 */ /* USER CODE END MemoryManagement_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */ /* USER CODE END W1_MemoryManagement_IRQn 0 */ } /* USER CODE BEGIN MemoryManagement_IRQn 1 */ /* USER CODE END MemoryManagement_IRQn 1 */ } /** * @brief This function handles Pre-fetch fault, memory access fault. */ void BusFault_Handler(void) { /* USER CODE BEGIN BusFault_IRQn 0 */ /* USER CODE END BusFault_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_BusFault_IRQn 0 */ /* USER CODE END W1_BusFault_IRQn 0 */ } /* USER CODE BEGIN BusFault_IRQn 1 */ /* USER CODE END BusFault_IRQn 1 */ } /** * @brief This function handles Undefined instruction or illegal state. */ void UsageFault_Handler(void) { /* USER CODE BEGIN UsageFault_IRQn 0 */ /* USER CODE END UsageFault_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_UsageFault_IRQn 0 */ /* USER CODE END W1_UsageFault_IRQn 0 */ } /* USER CODE BEGIN UsageFault_IRQn 1 */ /* USER CODE END UsageFault_IRQn 1 */ } /** * @brief This function handles System service call via SWI instruction. */ void SVC_Handler(void) { /* USER CODE BEGIN SVCall_IRQn 0 */ /* USER CODE END SVCall_IRQn 0 */ /* USER CODE BEGIN SVCall_IRQn 1 */ /* USER CODE END SVCall_IRQn 1 */ } /** * @brief This function handles Debug monitor. */ void DebugMon_Handler(void) { /* USER CODE BEGIN DebugMonitor_IRQn 0 */ /* USER CODE END DebugMonitor_IRQn 0 */ /* USER CODE BEGIN DebugMonitor_IRQn 1 */ /* USER CODE END DebugMonitor_IRQn 1 */ } /** * @brief This function handles Pendable request for system service. */ void PendSV_Handler(void) { /* USER CODE BEGIN PendSV_IRQn 0 */ /* USER CODE END PendSV_IRQn 0 */ /* USER CODE BEGIN PendSV_IRQn 1 */ /* USER CODE END PendSV_IRQn 1 */ } /** * @brief This function handles System tick timer. */ void SysTick_Handler(void) { /* USER CODE BEGIN SysTick_IRQn 0 */ /* USER CODE END SysTick_IRQn 0 */ HAL_IncTick(); HAL_SYSTICK_IRQHandler(); /* USER CODE BEGIN SysTick_IRQn 1 */ /* USER CODE END SysTick_IRQn 1 */ } /******************************************************************************/ /* STM32F4xx Peripheral Interrupt Handlers */ /* Add here the Interrupt Handlers for the used peripherals. */ /* For the available peripheral interrupt handler names, */ /* please refer to the startup file (startup_stm32f4xx.s). */ /******************************************************************************/ /** * @brief This function handles EXTI line[15:10] interrupts. */ void EXTI15_10_IRQHandler(void) { /* USER CODE BEGIN EXTI15_10_IRQn 0 */ /* USER CODE END EXTI15_10_IRQn 0 */ HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_10); /* USER CODE BEGIN EXTI15_10_IRQn 1 */ /* USER CODE END EXTI15_10_IRQn 1 */ } /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/** ****************************************************************************** * @file stm32f4xx_hal_gpio.c * @author MCD Application Team * @brief GPIO HAL module driver. * This file provides firmware functions to manage the following * functionalities of the General Purpose Input/Output (GPIO) peripheral: * + Initialization and de-initialization functions * + IO operation functions * @verbatim ============================================================================== ##### GPIO Peripheral features ##### ============================================================================== [..] Subject to the specific hardware characteristics of each I/O port listed in the datasheet, each port bit of the General Purpose IO (GPIO) Ports, can be individually configured by software in several modes: (+) Input mode (+) Analog mode (+) Output mode (+) Alternate function mode (+) External interrupt/event lines [..] During and just after reset, the alternate functions and external interrupt lines are not active and the I/O ports are configured in input floating mode. [..] All GPIO pins have weak internal pull-up and pull-down resistors, which can be activated or not. [..] In Output or Alternate mode, each IO can be configured on open-drain or push-pull type and the IO speed can be selected depending on the VDD value. [..] All ports have external interrupt/event capability. To use external interrupt lines, the port must be configured in input mode. All available GPIO pins are connected to the 16 external interrupt/event lines from EXTI0 to EXTI15. [..] The external interrupt/event controller consists of up to 23 edge detectors (16 lines are connected to GPIO) for generating event/interrupt requests (each input line can be independently configured to select the type (interrupt or event) and the corresponding trigger event (rising or falling or both). Each line can also be masked independently. ##### How to use this driver ##### ============================================================================== [..] (#) Enable the GPIO AHB clock using the following function: __HAL_RCC_GPIOx_CLK_ENABLE(). (#) Configure the GPIO pin(s) using HAL_GPIO_Init(). (++) Configure the IO mode using "Mode" member from GPIO_InitTypeDef structure (++) Activate Pull-up, Pull-down resistor using "Pull" member from GPIO_InitTypeDef structure. (++) In case of Output or alternate function mode selection: the speed is configured through "Speed" member from GPIO_InitTypeDef structure. (++) In alternate mode is selection, the alternate function connected to the IO is configured through "Alternate" member from GPIO_InitTypeDef structure. (++) Analog mode is required when a pin is to be used as ADC channel or DAC output. (++) In case of external interrupt/event selection the "Mode" member from GPIO_InitTypeDef structure select the type (interrupt or event) and the corresponding trigger event (rising or falling or both). (#) In case of external interrupt/event mode selection, configure NVIC IRQ priority mapped to the EXTI line using HAL_NVIC_SetPriority() and enable it using HAL_NVIC_EnableIRQ(). (#) To get the level of a pin configured in input mode use HAL_GPIO_ReadPin(). (#) To set/reset the level of a pin configured in output mode use HAL_GPIO_WritePin()/HAL_GPIO_TogglePin(). (#) To lock pin configuration until next reset use HAL_GPIO_LockPin(). (#) During and just after reset, the alternate functions are not active and the GPIO pins are configured in input floating mode (except JTAG pins). (#) The LSE oscillator pins OSC32_IN and OSC32_OUT can be used as general purpose (PC14 and PC15, respectively) when the LSE oscillator is off. The LSE has priority over the GPIO function. (#) The HSE oscillator pins OSC_IN/OSC_OUT can be used as general purpose PH0 and PH1, respectively, when the HSE oscillator is off. The HSE has priority over the GPIO function. @endverbatim ****************************************************************************** * @attention * * <h2><center>© COPYRIGHT(c) 2017 STMicroelectronics</center></h2> * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "stm32f4xx_hal.h" /** @addtogroup STM32F4xx_HAL_Driver * @{ */ /** @defgroup GPIO GPIO * @brief GPIO HAL module driver * @{ */ #ifdef HAL_GPIO_MODULE_ENABLED /* Private typedef -----------------------------------------------------------*/ /* Private define ------------------------------------------------------------*/ /** @addtogroup GPIO_Private_Constants GPIO Private Constants * @{ */ #define GPIO_MODE 0x00000003U #define EXTI_MODE 0x10000000U #define GPIO_MODE_IT 0x00010000U #define GPIO_MODE_EVT 0x00020000U #define RISING_EDGE 0x00100000U #define FALLING_EDGE 0x00200000U #define GPIO_OUTPUT_TYPE 0x00000010U #define GPIO_NUMBER 16U /** * @} */ /* Private macro -------------------------------------------------------------*/ /* Private variables ---------------------------------------------------------*/ /* Private function prototypes -----------------------------------------------*/ /* Private functions ---------------------------------------------------------*/ /* Exported functions --------------------------------------------------------*/ /** @defgroup GPIO_Exported_Functions GPIO Exported Functions * @{ */ /** @defgroup GPIO_Exported_Functions_Group1 Initialization and de-initialization functions * @brief Initialization and Configuration functions * @verbatim =============================================================================== ##### Initialization and de-initialization functions ##### =============================================================================== [..] This section provides functions allowing to initialize and de-initialize the GPIOs to be ready for use. @endverbatim * @{ */ /** * @brief Initializes the GPIOx peripheral according to the specified parameters in the GPIO_Init. * @param GPIOx where x can be (A..K) to select the GPIO peripheral for STM32F429X device or * x can be (A..I) to select the GPIO peripheral for STM32F40XX and STM32F427X devices. * @param GPIO_Init pointer to a GPIO_InitTypeDef structure that contains * the configuration information for the specified GPIO peripheral. * @retval None */ void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init) { uint32_t position; uint32_t ioposition = 0x00U; uint32_t iocurrent = 0x00U; uint32_t temp = 0x00U; /* Check the parameters */ assert_param(IS_GPIO_ALL_INSTANCE(GPIOx)); assert_param(IS_GPIO_PIN(GPIO_Init->Pin)); assert_param(IS_GPIO_MODE(GPIO_Init->Mode)); assert_param(IS_GPIO_PULL(GPIO_Init->Pull)); /* Configure the port pins */ for(position = 0U; position < GPIO_NUMBER; position++) { /* Get the IO position */ ioposition = 0x01U << position; /* Get the current IO position */ iocurrent = (uint32_t)(GPIO_Init->Pin) & ioposition; if(iocurrent == ioposition) { /*--------------------- GPIO Mode Configuration ------------------------*/ /* In case of Alternate function mode selection */ if((GPIO_Init->Mode == GPIO_MODE_AF_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_OD)) { /* Check the Alternate function parameter */ assert_param(IS_GPIO_AF(GPIO_Init->Alternate)); /* Configure Alternate function mapped with the current IO */ temp = GPIOx->AFR[position >> 3U]; temp &= ~(0xFU << ((uint32_t)(position & 0x07U) * 4U)) ; temp |= ((uint32_t)(GPIO_Init->Alternate) << (((uint32_t)position & 0x07U) * 4U)); GPIOx->AFR[position >> 3U] = temp; } /* Configure IO Direction mode (Input, Output, Alternate or Analog) */ temp = GPIOx->MODER; temp &= ~(GPIO_MODER_MODER0 << (position * 2U)); temp |= ((GPIO_Init->Mode & GPIO_MODE) << (position * 2U)); GPIOx->MODER = temp; /* In case of Output or Alternate function mode selection */ if((GPIO_Init->Mode == GPIO_MODE_OUTPUT_PP) || (GPIO_Init->Mode == GPIO_MODE_AF_PP) || (GPIO_Init->Mode == GPIO_MODE_OUTPUT_OD) || (GPIO_Init->Mode == GPIO_MODE_AF_OD)) { /* Check the Speed parameter */ assert_param(IS_GPIO_SPEED(GPIO_Init->Speed)); /* Configure the IO Speed */ temp = GPIOx->OSPEEDR; temp &= ~(GPIO_OSPEEDER_OSPEEDR0 << (position * 2U)); temp |= (GPIO_Init->Speed << (position * 2U)); GPIOx->OSPEEDR = temp; /* Configure the IO Output Type */ temp = GPIOx->OTYPER; temp &= ~(GPIO_OTYPER_OT_0 << position) ; temp |= (((GPIO_Init->Mode & GPIO_OUTPUT_TYPE) >> 4U) << position); GPIOx->OTYPER = temp; } /* Activate the Pull-up or Pull down resistor for the current IO */ temp = GPIOx->PUPDR; temp &= ~(GPIO_PUPDR_PUPDR0 << (position * 2U)); temp |= ((GPIO_Init->Pull) << (position * 2U)); GPIOx->PUPDR = temp; /*--------------------- EXTI Mode Configuration ------------------------*/ /* Configure the External Interrupt or event for the current IO */ if((GPIO_Init->Mode & EXTI_MODE) == EXTI_MODE) { /* Enable SYSCFG Clock */ __HAL_RCC_SYSCFG_CLK_ENABLE(); temp = SYSCFG->EXTICR[position >> 2U]; temp &= ~(0x0FU << (4U * (position & 0x03U))); temp |= ((uint32_t)(GPIO_GET_INDEX(GPIOx)) << (4U * (position & 0x03U))); SYSCFG->EXTICR[position >> 2U] = temp; /* Clear EXTI line configuration */ temp = EXTI->IMR; temp &= ~((uint32_t)iocurrent); if((GPIO_Init->Mode & GPIO_MODE_IT) == GPIO_MODE_IT) { temp |= iocurrent; } EXTI->IMR = temp; temp = EXTI->EMR; temp &= ~((uint32_t)iocurrent); if((GPIO_Init->Mode & GPIO_MODE_EVT) == GPIO_MODE_EVT) { temp |= iocurrent; } EXTI->EMR = temp; /* Clear Rising Falling edge configuration */ temp = EXTI->RTSR; temp &= ~((uint32_t)iocurrent); if((GPIO_Init->Mode & RISING_EDGE) == RISING_EDGE) { temp |= iocurrent; } EXTI->RTSR = temp; temp = EXTI->FTSR; temp &= ~((uint32_t)iocurrent); if((GPIO_Init->Mode & FALLING_EDGE) == FALLING_EDGE) { temp |= iocurrent; } EXTI->FTSR = temp; } } } } /** * @brief De-initializes the GPIOx peripheral registers to their default reset values. * @param GPIOx where x can be (A..K) to select the GPIO peripheral for STM32F429X device or * x can be (A..I) to select the GPIO peripheral for STM32F40XX and STM32F427X devices. * @param GPIO_Pin specifies the port bit to be written. * This parameter can be one of GPIO_PIN_x where x can be (0..15). * @retval None */ void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin) { uint32_t position; uint32_t ioposition = 0x00U; uint32_t iocurrent = 0x00U; uint32_t tmp = 0x00U; /* Check the parameters */ assert_param(IS_GPIO_ALL_INSTANCE(GPIOx)); /* Configure the port pins */ for(position = 0U; position < GPIO_NUMBER; position++) { /* Get the IO position */ ioposition = 0x01U << position; /* Get the current IO position */ iocurrent = (GPIO_Pin) & ioposition; if(iocurrent == ioposition) { /*------------------------- GPIO Mode Configuration --------------------*/ /* Configure IO Direction in Input Floating Mode */ GPIOx->MODER &= ~(GPIO_MODER_MODER0 << (position * 2U)); /* Configure the default Alternate Function in current IO */ GPIOx->AFR[position >> 3U] &= ~(0xFU << ((uint32_t)(position & 0x07U) * 4U)) ; /* Configure the default value for IO Speed */ GPIOx->OSPEEDR &= ~(GPIO_OSPEEDER_OSPEEDR0 << (position * 2U)); /* Configure the default value IO Output Type */ GPIOx->OTYPER &= ~(GPIO_OTYPER_OT_0 << position) ; /* Deactivate the Pull-up and Pull-down resistor for the current IO */ GPIOx->PUPDR &= ~(GPIO_PUPDR_PUPDR0 << (position * 2U)); /*------------------------- EXTI Mode Configuration --------------------*/ tmp = SYSCFG->EXTICR[position >> 2U]; tmp &= (0x0FU << (4U * (position & 0x03U))); if(tmp == ((uint32_t)(GPIO_GET_INDEX(GPIOx)) << (4U * (position & 0x03U)))) { /* Configure the External Interrupt or event for the current IO */ tmp = 0x0FU << (4U * (position & 0x03U)); SYSCFG->EXTICR[position >> 2U] &= ~tmp; /* Clear EXTI line configuration */ EXTI->IMR &= ~((uint32_t)iocurrent); EXTI->EMR &= ~((uint32_t)iocurrent); /* Clear Rising Falling edge configuration */ EXTI->RTSR &= ~((uint32_t)iocurrent); EXTI->FTSR &= ~((uint32_t)iocurrent); } } } } /** * @} */ /** @defgroup GPIO_Exported_Functions_Group2 IO operation functions * @brief GPIO Read and Write * @verbatim =============================================================================== ##### IO operation functions ##### =============================================================================== @endverbatim * @{ */ /** * @brief Reads the specified input port pin. * @param GPIOx where x can be (A..K) to select the GPIO peripheral for STM32F429X device or * x can be (A..I) to select the GPIO peripheral for STM32F40XX and STM32F427X devices. * @param GPIO_Pin specifies the port bit to read. * This parameter can be GPIO_PIN_x where x can be (0..15). * @retval The input port pin value. */ GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { GPIO_PinState bitstatus; /* Check the parameters */ assert_param(IS_GPIO_PIN(GPIO_Pin)); if((GPIOx->IDR & GPIO_Pin) != (uint32_t)GPIO_PIN_RESET) { bitstatus = GPIO_PIN_SET; } else { bitstatus = GPIO_PIN_RESET; } return bitstatus; } /** * @brief Sets or clears the selected data port bit. * * @note This function uses GPIOx_BSRR register to allow atomic read/modify * accesses. In this way, there is no risk of an IRQ occurring between * the read and the modify access. * * @param GPIOx where x can be (A..K) to select the GPIO peripheral for STM32F429X device or * x can be (A..I) to select the GPIO peripheral for STM32F40XX and STM32F427X devices. * @param GPIO_Pin specifies the port bit to be written. * This parameter can be one of GPIO_PIN_x where x can be (0..15). * @param PinState specifies the value to be written to the selected bit. * This parameter can be one of the GPIO_PinState enum values: * @arg GPIO_PIN_RESET: to clear the port pin * @arg GPIO_PIN_SET: to set the port pin * @retval None */ void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState) { /* Check the parameters */ assert_param(IS_GPIO_PIN(GPIO_Pin)); assert_param(IS_GPIO_PIN_ACTION(PinState)); if(PinState != GPIO_PIN_RESET) { GPIOx->BSRR = GPIO_Pin; } else { GPIOx->BSRR = (uint32_t)GPIO_Pin << 16U; } } /** * @brief Toggles the specified GPIO pins. * @param GPIOx Where x can be (A..K) to select the GPIO peripheral for STM32F429X device or * x can be (A..I) to select the GPIO peripheral for STM32F40XX and STM32F427X devices. * @param GPIO_Pin Specifies the pins to be toggled. * @retval None */ void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { /* Check the parameters */ assert_param(IS_GPIO_PIN(GPIO_Pin)); GPIOx->ODR ^= GPIO_Pin; } /** * @brief Locks GPIO Pins configuration registers. * @note The locked registers are GPIOx_MODER, GPIOx_OTYPER, GPIOx_OSPEEDR, * GPIOx_PUPDR, GPIOx_AFRL and GPIOx_AFRH. * @note The configuration of the locked GPIO pins can no longer be modified * until the next reset. * @param GPIOx where x can be (A..F) to select the GPIO peripheral for STM32F4 family * @param GPIO_Pin specifies the port bit to be locked. * This parameter can be any combination of GPIO_PIN_x where x can be (0..15). * @retval None */ HAL_StatusTypeDef HAL_GPIO_LockPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { __IO uint32_t tmp = GPIO_LCKR_LCKK; /* Check the parameters */ assert_param(IS_GPIO_PIN(GPIO_Pin)); /* Apply lock key write sequence */ tmp |= GPIO_Pin; /* Set LCKx bit(s): LCKK='1' + LCK[15-0] */ GPIOx->LCKR = tmp; /* Reset LCKx bit(s): LCKK='0' + LCK[15-0] */ GPIOx->LCKR = GPIO_Pin; /* Set LCKx bit(s): LCKK='1' + LCK[15-0] */ GPIOx->LCKR = tmp; /* Read LCKK bit*/ tmp = GPIOx->LCKR; if((GPIOx->LCKR & GPIO_LCKR_LCKK) != RESET) { return HAL_OK; } else { return HAL_ERROR; } } /** * @brief This function handles EXTI interrupt request. * @param GPIO_Pin Specifies the pins connected EXTI line * @retval None */ void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin) { /* EXTI line interrupt detected */ if(__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != RESET) { __HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin); HAL_GPIO_EXTI_Callback(GPIO_Pin); } } /** * @brief EXTI line detection callbacks. * @param GPIO_Pin Specifies the pins connected EXTI line * @retval None */ __weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { /* Prevent unused argument(s) compilation warning */ UNUSED(GPIO_Pin); /* NOTE: This function Should not be modified, when the callback is needed, the HAL_GPIO_EXTI_Callback could be implemented in the user file */ } /** * @} */ /** * @} */ #endif /* HAL_GPIO_MODULE_ENABLED */ /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/** ****************************************************************************** * File Name : gpio.c * Description : This file provides code for the configuration * of all used GPIO pins. ****************************************************************************** ** This notice applies to any and all portions of this file * that are not between comment pairs USER CODE BEGIN and * USER CODE END. Other portions of this file, whether * inserted by the user or by software development tools * are owned by their respective copyright owners. * * COPYRIGHT(c) 2019 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "gpio.h" /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /*----------------------------------------------------------------------------*/ /* Configure GPIO */ /*----------------------------------------------------------------------------*/ /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOH_CLK_ENABLE(); __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOD, LED1_Pin|LED2_Pin|LED3_Pin|LED4_Pin, GPIO_PIN_SET); /*Configure GPIO pin : PtPin */ GPIO_InitStruct.Pin = EXTI_IT_Pin; GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING; GPIO_InitStruct.Pull = GPIO_PULLUP; HAL_GPIO_Init(EXTI_IT_GPIO_Port, &GPIO_InitStruct); /*Configure GPIO pins : PDPin PDPin PDPin PDPin */ GPIO_InitStruct.Pin = LED1_Pin|LED2_Pin|LED3_Pin|LED4_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOD, &GPIO_InitStruct); } /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
各个主要的函数如上面所示。
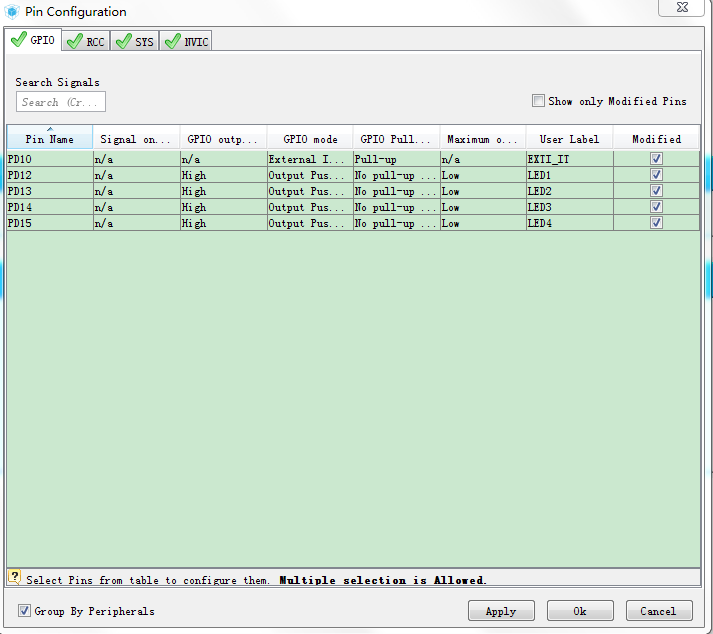
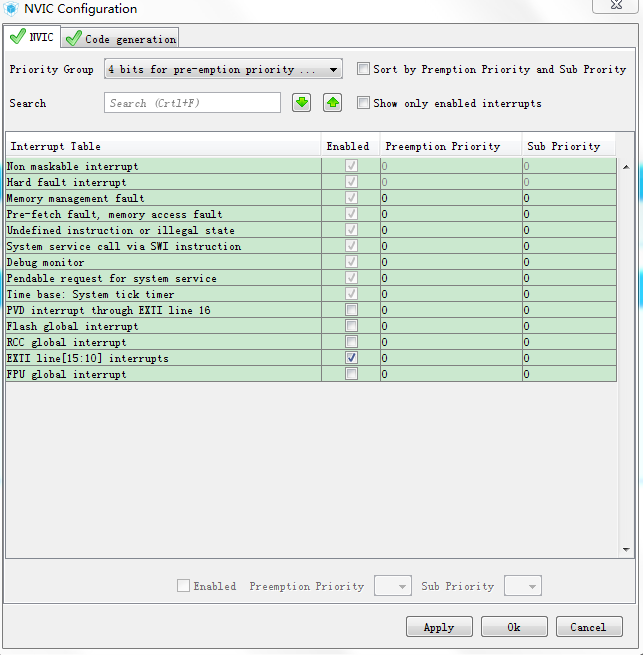
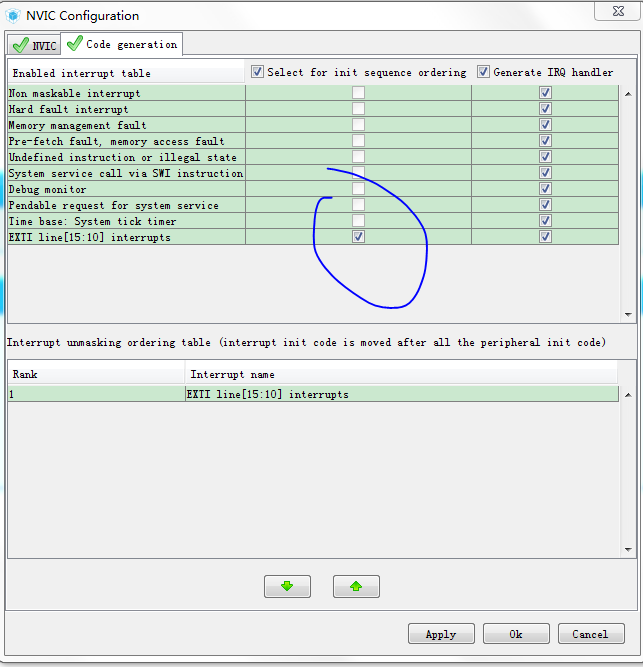
stm32cubemx的设置如下:
同时,iar的导出工程如下:

三、代码分析
1、在开发板的启动文件startup_stm32f411xe.s中将EXTI15_10_IRQHandler函数注册为外部中断10~15号线的中断服务函数,当外部中断10~15号线产生外部中断时由硬件调用EXTI15_10_IRQHandler函数,中断当前运行的程序,CPU开始执行中断服务函数内的程序,执行完之后继续运行中断前的程序;
2、因为STM32F4的硬件结构决定了外部中断10~15号线共用一个中断向量,因此只能注册一个中断服务函数,而HAL框架使用HAL_GPIO_EXTI_IRQHandler()函数和HAL_GPIO_EXTI_Callback()函数使用户看来每个外部中断线都拥有自己的中断服务函数(后面会讲解这两个函数);
3、在stm32f4xx_it.c文件中定义了EXTI15_10_IRQHandler函数,该函数调用了HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_13);语句;
4、HAL_GPIO_EXTI_IRQHandler()在stm32f4xx_hal_gpio.c文件中定义了,该函数判断外部中断是由哪一号外部中断线产生的,并且清除中断挂起寄存器中的对应位,然后调用外部中断回调函数HAL_GPIO_EXTI_Callback(),并将产生外部中断的中断线作为参数传递给外部中断回调函数HAL_GPIO_EXTI_Callback();
5、而上面的所有工作都由STM32CubeMX帮我们做好了,我们只需要在main.c文件中重定义HAL_GPIO_EXTI_Callback()函数就行了;
6、因为所有外部中断都会调用HAL_GPIO_EXTI_Callback()函数,所以我们需要在HAL_GPIO_EXTI_Callback()函数内部根据输入的GPIO_Pin参数判断是哪一号外部中断线的产生了外部中断,然后根据不同的外部中断执行不同的代码;
7、因此我们使用语句if(GPIO_Pin == GPIO_PIN_13)判断该外部中断是否是由外部中断13号线产生的,然后执行HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);语句翻转LED灯的电平状态;
小贴士:我们不应该在中断服务函数或者中断回调函数内执行过多的代码,这样做是为了最大程度地减少中断嵌套。有关中断嵌套和中断优先级的内容请自行百度,中断优先级(不仅限于外部中断)可以在STM32CubeMX中的NVIC Configuration中设置。