同nand-flash驱动框架,只需实现底层硬件相关的操作。
nor-flash驱动实现:
- 分配map_info结构体;
- 设置map_info结构体:物理基地址(phys)、大小(size)、位宽(bankwidth)、虚拟基地址(virt);
- 使用,调用do_map_probe(“cfi_probe”,s3c_nor_map)识别(cfi_probe/jedec_probe);
- 设置分区add_mtd_partitions。
程序源码
#include <linux/module.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/slab.h>
#include <linux/device.h>
#include <linux/platform_device.h>
#include <linux/mtd/mtd.h>
#include <linux/mtd/map.h>
#include <linux/mtd/partitions.h>
#include <linux/mtd/physmap.h>
#include <asm/io.h>
static struct mtd_info *s3c_nor_mtd;
static struct map_info *s3c_nor_map;
/*设置分区*/
static struct mtd_partition s3c_nor_parts[] = {
[0] = {
.name = "bootloader",
.size = 0x00040000,//256k
.offset = 0,
},
[1] = {
.name = "root-nor",
.offset = MTDPART_OFS_APPEND,
.size = MTDPART_SIZ_FULL,//剩下所有
}
};
static int s3c_nor_init(void)
{
/*1分配一个map_info结构体*/
s3c_nor_map=kzalloc(sizeof(struct map_info), GFP_KERNEL);
/*2设置:物理基地址(phys);大小(size);位宽(bankwidth);虚拟基地址(virt)*/
s3c_nor_map->name ="s3c_nor";
s3c_nor_map->phys = 0;
s3c_nor_map->size = 0x1000000; //>=norflash的真正大小
s3c_nor_map->bankwidth=2; //16/8
s3c_nor_map->virt = ioremap(s3c_nor_map->phys, s3c_nor_map->size);
simple_map_init(s3c_nor_map);//初始化
/*3调用norflash协议层提供的函数识别*/
s3c_nor_mtd=do_map_probe("cfi_probe",s3c_nor_map);
if (!s3c_nor_mtd)
{
printk("use jedec_probe\n");
s3c_nor_mtd = do_map_probe("jedec_probe", s3c_nor_map);
}
if (!s3c_nor_mtd)
{
iounmap(s3c_nor_map->virt);
kfree(s3c_nor_map);
return -EIO;
}
/*4添加分区,add_mtd_partitions*/
//add_mtd_partitions(s3c_nor_mtd,s3c_nor_parts,2);
mtd_device_register(s3c_nor_mtd, s3c_nor_parts, 2);
return 0;
}
static void s3c_nor_exit(void)
{
//del_mtd_partitions(s3c_nor_mtd);
mtd_device_unregister(s3c_nor_mtd);
iounmap(s3c_nor_map->virt);
kfree(s3c_nor_map);
}
module_init(s3c_nor_init);//入口函数
module_exit(s3c_nor_exit);//出口函数
MODULE_LICENSE("GPL");
数据存放
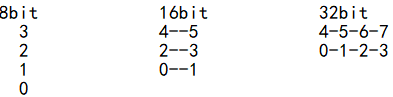
内存地址线错开原因:

32位的SDRAM错开两位;16位的nor-flash错开一位。