代码分为几个部分,c++部分使用g++进行编译
(1)双目摄像头标定图像数据集收集保存
//image_save.cpp
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
cv::VideoCapture capl(0);
cv::VideoCapture capr(1);
int i = 0;
cv::Mat cam_left;
cv::Mat cam_right;
char filename_l[15];
char filename_r[15];
while(capl.read(cam_left) && capr.read(cam_right))
{
cv::imshow("cam_left", cam_left);
cv::imshow("cam_right", cam_right);
char c = cv::waitKey(1);
char s[40];
if(c==' ') //按空格采集图像
{
sprintf(filename_l, "left%d.jpg",i);
imwrite(filename_l, cam_left);
sprintf(filename_r, "right%d.jpg",i++);
imwrite(filename_r, cam_right);
//printf(s, "%s%d%s\n", "the ",i++,"th image");
cout << "save the "<< i <<"th image\n"<< endl;
}
if(c=='q' || c=='Q') // 按q退出
{
break;
}
}
return 0;
}
显示结果



(2)单目标定
//calibration.cpp
#include <iostream>
#include <sstream>
#include <time.h>
#include <stdio.h>
#include <fstream>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace cv;
using namespace std;
#define calibration
int main()
{
#ifdef calibration
ifstream fin("right_img.txt"); /* 标定所用图像文件的路径 */
ofstream fout("caliberation_result_right.txt"); /* 保存标定结果的文件 */
// 读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
int image_count = 0; /* 图像数量 */
Size image_size; /* 图像的尺寸 */
Size board_size = Size(11,8); /* 标定板上每行、列的角点数 */
vector<Point2f> image_points_buf; /* 缓存每幅图像上检测到的角点 */
vector<vector<Point2f>> image_points_seq; /* 保存检测到的所有角点 */
string filename; // 图片名
vector<string> filenames;
while (getline(fin, filename))
{
++image_count;
Mat imageInput = imread(filename);
filenames.push_back(filename);
// 读入第一张图片时获取图片大小
if (image_count == 1)
{
image_size.width = imageInput.cols;
image_size.height = imageInput.rows;
}
/* 提取角点 */
if (0 == findChessboardCorners(imageInput, board_size, image_points_buf))
{
//cout << "can not find chessboard corners!\n"; // 找不到角点
cout << "**" << filename << "** can not find chessboard corners!\n";
exit(1);
}
else
{
Mat view_gray;
cvtColor(imageInput, view_gray, CV_RGB2GRAY); // 转灰度图
/* 亚像素精确化 */
// image_points_buf 初始的角点坐标向量,同时作为亚像素坐标位置的输出
// Size(5,5) 搜索窗口大小
// (-1,-1)表示没有死区
// TermCriteria 角点的迭代过程的终止条件, 可以为迭代次数和角点精度两者的组合
cornerSubPix(view_gray, image_points_buf, Size(5, 5), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
image_points_seq.push_back(image_points_buf); // 保存亚像素角点
/* 在图像上显示角点位置 */
drawChessboardCorners(view_gray, board_size, image_points_buf, false); // 用于在图片中标记角点
imshow("Camera Calibration", view_gray); // 显示图片
waitKey(500); //暂停0.5S
}
}
int CornerNum = board_size.width * board_size.height; // 每张图片上总的角点数
//-------------以下是摄像机标定------------------
/*棋盘三维信息*/
Size square_size = Size(60, 60); /* 实际测量得到的标定板上每个棋盘格的大小 */
vector<vector<Point3f>> object_points; /* 保存标定板上角点的三维坐标 */
/*内外参数*/
Mat cameraMatrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); /* 摄像机内参数矩阵 */
vector<int> point_counts; // 每幅图像中角点的数量
Mat distCoeffs = Mat(1, 5, CV_32FC1, Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */
vector<Mat> tvecsMat; /* 每幅图像的旋转向量 */
vector<Mat> rvecsMat; /* 每幅图像的平移向量 */
/* 初始化标定板上角点的三维坐标 */
int i, j, t;
for (t = 0; t<image_count; t++)
{
vector<Point3f> tempPointSet;
for (i = 0; i<board_size.height; i++)
{
for (j = 0; j<board_size.width; j++)
{
Point3f realPoint;
/* 假设标定板放在世界坐标系中z=0的平面上 */
realPoint.x = i * square_size.width;
realPoint.y = j * square_size.height;
realPoint.z = 0;
tempPointSet.push_back(realPoint);
}
}
object_points.push_back(tempPointSet);
}
/* 初始化每幅图像中的角点数量,假定每幅图像中都可以看到完整的标定板 */
for (i = 0; i<image_count; i++)
{
point_counts.push_back(board_size.width * board_size.height);
}
/* 开始标定 */
// object_points 世界坐标系中的角点的三维坐标
// image_points_seq 每一个内角点对应的图像坐标点
// image_size 图像的像素尺寸大小
// cameraMatrix 输出,内参矩阵
// distCoeffs 输出,畸变系数
// rvecsMat 输出,旋转向量
// tvecsMat 输出,位移向量
// 0 标定时所采用的算法
calibrateCamera(object_points, image_points_seq, image_size, cameraMatrix, distCoeffs, rvecsMat, tvecsMat, 0);
//------------------------标定完成------------------------------------
// -------------------对标定结果进行评价------------------------------
double total_err = 0.0; /* 所有图像的平均误差的总和 */
double err = 0.0; /* 每幅图像的平均误差 */
vector<Point2f> image_points2; /* 保存重新计算得到的投影点 */
fout << "每幅图像的标定误差:\n";
for (i = 0; i<image_count; i++)
{
vector<Point3f> tempPointSet = object_points[i];
/* 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 */
projectPoints(tempPointSet, rvecsMat[i], tvecsMat[i], cameraMatrix, distCoeffs, image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector<Point2f> tempImagePoint = image_points_seq[i];
Mat tempImagePointMat = Mat(1, tempImagePoint.size(), CV_32FC2);
Mat image_points2Mat = Mat(1, image_points2.size(), CV_32FC2);
for (int j = 0; j < tempImagePoint.size(); j++)
{
image_points2Mat.at<Vec2f>(0, j) = Vec2f(image_points2[j].x, image_points2[j].y);
tempImagePointMat.at<Vec2f>(0, j) = Vec2f(tempImagePoint[j].x, tempImagePoint[j].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err /= point_counts[i];
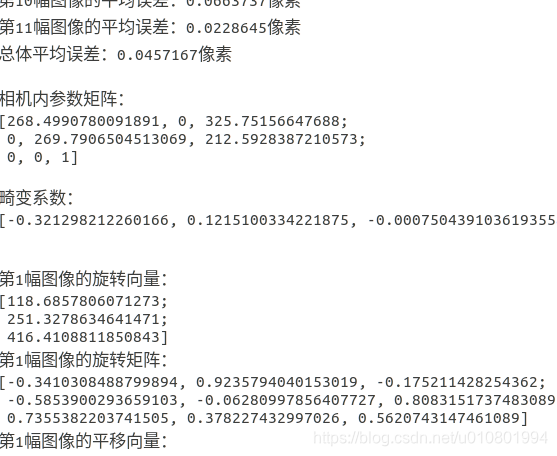
fout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
fout << "总体平均误差:" << total_err / image_count << "像素" << endl << endl;
//-------------------------评价完成---------------------------------------------
//-----------------------保存定标结果-------------------------------------------
Mat rotation_matrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
fout << "相机内参数矩阵:" << endl;
fout << cameraMatrix << endl << endl;
fout << "畸变系数:\n";
fout << distCoeffs << endl << endl << endl;
for (int i = 0; i<image_count; i++)
{
fout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
fout << tvecsMat[i] << endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(tvecsMat[i], rotation_matrix);
fout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
fout << rotation_matrix << endl;
fout << "第" << i + 1 << "幅图像的平移向量:" << endl;
fout << rvecsMat[i] << endl << endl;
}
fout << endl;
//--------------------标定结果保存结束-------------------------------
//----------------------显示定标结果--------------------------------
Mat mapx = Mat(image_size, CV_32FC1);
Mat mapy = Mat(image_size, CV_32FC1);
Mat R = Mat::eye(3, 3, CV_32F);
string imageFileName;
std::stringstream StrStm;
for (int i = 0; i != image_count; i++)
{
initUndistortRectifyMap(cameraMatrix, distCoeffs, R, cameraMatrix, image_size, CV_32FC1, mapx, mapy);
Mat imageSource = imread(filenames[i]);
Mat newimage = imageSource.clone();
remap(imageSource, newimage, mapx, mapy, INTER_LINEAR);
StrStm.clear();
imageFileName.clear();
StrStm << i + 1;
StrStm >> imageFileName;
imageFileName += "_d.jpg";
imwrite(imageFileName, newimage);
}
fin.close();
fout.close();
#else
/// 读取一副图片,不改变图片本身的颜色类型(该读取方式为DOS运行模式)
Mat src = imread("F:\\lane_line_detection\\left_img\\1.jpg");
Mat distortion = src.clone();
Mat camera_matrix = Mat(3, 3, CV_32FC1);
Mat distortion_coefficients;
//导入相机内参和畸变系数矩阵
FileStorage file_storage("F:\\lane_line_detection\\left_img\\Intrinsic.xml", FileStorage::READ);
file_storage["CameraMatrix"] >> camera_matrix;
file_storage["Dist"] >> distortion_coefficients;
file_storage.release();
//矫正
cv::undistort(src, distortion, camera_matrix, distortion_coefficients);
cv::imshow("img", src);
cv::imshow("undistort", distortion);
cv::imwrite("undistort.jpg", distortion);
cv::waitKey(0);
#endif // DEBUG
return 0;
}
获得的结果
进行双目标定之前,先分别确定左右摄像头的内参和外参。
双目标定
//双目相机标定 stereo_calib.cpp
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <vector>
#include <string>
#include <algorithm>
#include <iostream>
#include <iterator>
#include <stdio.h>
#include <stdlib.h>
#include <ctype.h>
#include <opencv2/opencv.hpp>
//#include <cv.h>
//#include <cv.hpp>
using namespace std;
using namespace cv;
//摄像头的分辨率
const int imageWidth = 640;
const int imageHeight = 480;
//横向的角点数目
const int boardWidth = 11;
//纵向的角点数目
const int boardHeight = 8;
//总的角点数目
const int boardCorner = boardWidth * boardHeight;
//相机标定时需要采用的图像帧数
const int frameNumber = 8;
//标定板黑白格子的大小 单位是mm
const int squareSize = 60;
//标定板的总内角点
const Size boardSize = Size(boardWidth, boardHeight);
Size imageSize = Size(imageWidth, imageHeight);
Mat R, T, E, F;
//R旋转矢量 T平移矢量 E本征矩阵 F基础矩阵
vector<Mat> rvecs; //R
vector<Mat> tvecs; //T
//左边摄像机所有照片角点的坐标集合
vector<vector<Point2f>> imagePointL;
//右边摄像机所有照片角点的坐标集合
vector<vector<Point2f>> imagePointR;
//各图像的角点的实际的物理坐标集合
vector<vector<Point3f>> objRealPoint;
//左边摄像机某一照片角点坐标集合
vector<Point2f> cornerL;
//右边摄像机某一照片角点坐标集合
vector<Point2f> cornerR;
Mat rgbImageL, grayImageL;
Mat rgbImageR, grayImageR;
Mat intrinsic;
Mat distortion_coeff;
//校正旋转矩阵R,投影矩阵P,重投影矩阵Q
Mat Rl, Rr, Pl, Pr, Q;
//映射表
Mat mapLx, mapLy, mapRx, mapRy;
Rect validROIL, validROIR;
//图像校正之后,会对图像进行裁剪,其中,validROI裁剪之后的区域
/*事先标定好的左相机的内参矩阵
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraMatrixL = (Mat_<double>(3,3) << 271.7792785637638, 0, 313.4559554347688,
0, 271.9513066781816, 232.7561625477742,
0, 0, 1);
//获得的畸变参数
Mat distCoeffL = (Mat_<double>(5,1) << -0.3271838086967946, 0.1326861805365006, -0.0008527407221595511, -0.0003398213328658643, -0.02847446149341753);
/*事先标定好的右相机的内参矩阵
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraMatrixR = (Mat_<double>(3,3) << 268.4990780091891, 0, 325.75156647688,
0, 269.7906504513069, 212.5928387210573,
0, 0, 1);
Mat distCoeffR = (Mat_<double>(5,1) << -0.321298212260166, 0.1215100334221875, -0.0007504391036193558, -1.732473939234179e-05, -0.02234659175488724);
/*计算标定板上模块的实际物理坐标*/
void calRealPoint(vector<vector<Point3f>>& obj, int boardWidth, int boardHeight, int imgNumber, int squareSize)
{
vector<Point3f> imgpoint;
for (int rowIndex = 0; rowIndex < boardHeight; rowIndex++)
{
for (int colIndex = 0; colIndex < boardWidth; colIndex++)
{
imgpoint.push_back(Point3f(rowIndex * squareSize, colIndex * squareSize, 0));
}
}
for (int imgIndex = 0; imgIndex < imgNumber; imgIndex++)
{
obj.push_back(imgpoint);
}
}
void outputCameraParam(void)
{
/*保存数据*/
/*输出数据*/
FileStorage fs("intrisics.yml", FileStorage::WRITE);
if (fs.isOpened())
{
fs << "cameraMatrixL" << cameraMatrixL << "cameraDistcoeffL" << distCoeffL << "cameraMatrixR" << cameraMatrixR << "cameraDistcoeffR" << distCoeffR;
fs.release();
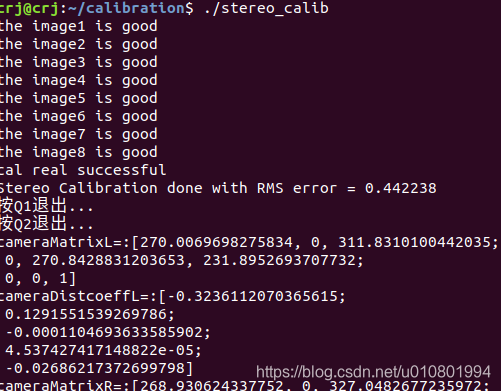
cout << "cameraMatrixL=:" << cameraMatrixL << endl << "cameraDistcoeffL=:" << distCoeffL << endl << "cameraMatrixR=:" << cameraMatrixR << endl << "cameraDistcoeffR=:" << distCoeffR << endl;
}
else
{
cout << "Error: can not save the intrinsics!!!!" << endl;
}
fs.open("extrinsics.yml", FileStorage::WRITE);
if (fs.isOpened())
{
fs << "R" << R << "T" << T << "Rl" << Rl << "Rr" << Rr << "Pl" << Pl << "Pr" << Pr << "Q" << Q;
cout << "R=" << R << endl << "T=" << T << endl << "Rl=" << Rl << endl << "Rr" << Rr << endl << "Pl" << Pl << endl << "Pr" << Pr << endl << "Q" << Q << endl;
fs.release();
}
else
{
cout << "Error: can not save the extrinsic parameters\n";
}
}
int main(int argc, char* argv[])
{
Mat img;
int goodFrameCount = 0;
while (goodFrameCount < frameNumber)
{
char filename[100];
/*读取左边的图像*/
sprintf(filename, "/home/crj/calibration/left_img/left%d.jpg", goodFrameCount + 1);
rgbImageL = imread(filename, CV_LOAD_IMAGE_COLOR);
imshow("chessboardL", rgbImageL);
cvtColor(rgbImageL, grayImageL, CV_BGR2GRAY);
/*读取右边的图像*/
sprintf(filename, "/home/crj/calibration/right_img/right%d.jpg", goodFrameCount + 1);
rgbImageR = imread(filename, CV_LOAD_IMAGE_COLOR);
cvtColor(rgbImageR, grayImageR, CV_BGR2GRAY);
bool isFindL, isFindR;
isFindL = findChessboardCorners(rgbImageL, boardSize, cornerL);
isFindR = findChessboardCorners(rgbImageR, boardSize, cornerR);
if (isFindL == true && isFindR == true)
{
cornerSubPix(grayImageL, cornerL, Size(5,5), Size(-1,1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 20, 0.1));
drawChessboardCorners(rgbImageL, boardSize, cornerL, isFindL);
imshow("chessboardL", rgbImageL);
imagePointL.push_back(cornerL);
cornerSubPix(grayImageR, cornerR, Size(5,5), Size(-1,-1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 20, 0.1));
drawChessboardCorners(rgbImageR, boardSize, cornerR, isFindR);
imshow("chessboardR", rgbImageR);
imagePointR.push_back(cornerR);
goodFrameCount++;
cout << "the image" << goodFrameCount << " is good" << endl;
}
else
{
cout << "the image is bad please try again" << endl;
}
if (waitKey(10) == 'q')
{
break;
}
}
//计算实际的校正点的三维坐标,根据实际标定格子的大小来设置
calRealPoint(objRealPoint, boardWidth, boardHeight, frameNumber, squareSize);
cout << "cal real successful" << endl;
//标定摄像头
double rms = stereoCalibrate(objRealPoint, imagePointL, imagePointR,
cameraMatrixL, distCoeffL,
cameraMatrixR, distCoeffR,
Size(imageWidth, imageHeight), R, T, E, F, CALIB_USE_INTRINSIC_GUESS,
TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 100, 1e-5));
cout << "Stereo Calibration done with RMS error = " << rms << endl;
stereoRectify(cameraMatrixL, distCoeffL, cameraMatrixR, distCoeffR, imageSize, R, T, Rl,
Rr, Pl, Pr, Q, CALIB_ZERO_DISPARITY, -1, imageSize, &validROIL,&validROIR);
//摄像机校正映射
initUndistortRectifyMap(cameraMatrixL, distCoeffL, Rl, Pl, imageSize, CV_32FC1, mapLx, mapLy);
initUndistortRectifyMap(cameraMatrixR, distCoeffR, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
Mat rectifyImageL, rectifyImageR;
cvtColor(grayImageL, rectifyImageL, CV_GRAY2BGR);
cvtColor(grayImageR, rectifyImageR, CV_GRAY2BGR);
imshow("Recitify Before", rectifyImageL);
cout << "按Q1退出..." << endl;
//经过remap之后,左右相机的图像已经共面并且行对准了
Mat rectifyImageL2, rectifyImageR2;
remap(rectifyImageL, rectifyImageL2, mapLx, mapLy, INTER_LINEAR);
remap(rectifyImageR, rectifyImageR2, mapRx, mapRy, INTER_LINEAR);
cout << "按Q2退出..." << endl;
imshow("rectifyImageL", rectifyImageL2);
imshow("rectifyImageR", rectifyImageR2);
outputCameraParam();
//显示校正结果
Mat canvas;
double sf;
int w,h;
sf = 600. / MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width * sf);
h = cvRound(imageSize.height * sf);
canvas.create(h, w*2, CV_8UC3);
//左图像画到画布上
Mat canvasPart = canvas(Rect(0, 0, w, h));
resize(rectifyImageL2, canvasPart, canvasPart.size(), 0, 0, INTER_AREA);
Rect vroiL(cvRound(validROIL.x*sf), cvRound(validROIL.y*sf),
cvRound(validROIL.width*sf), cvRound(validROIL.height*sf));
rectangle(canvasPart, vroiL, Scalar(0, 0, 255), 3, 8);
cout << "Painted ImageL" << endl;
//右图像画到画布上
canvasPart = canvas(Rect(w, 0, w, h));
resize(rectifyImageR2, canvasPart, canvasPart.size(), 0, 0, INTER_LINEAR);
Rect vroiR(cvRound(validROIR.x*sf), cvRound(validROIR.y*sf),
cvRound(validROIR.width*sf), cvRound(validROIR.height*sf));
rectangle(canvasPart, vroiR, Scalar(0, 255, 0), 3, 8);
cout << "Painted ImageR" << endl;
//画上对应的线条
for (int i = 0; i < canvas.rows; i += 16)
line(canvas, Point(0, i), Point(canvas.cols, i), Scalar(0, 255, 0), 1, 8);
imshow("rectified", canvas);
cout << "wait key" << endl;
waitKey(0);
return 0;
}
结果展示:

结果展示:
代码较粗糙,后续会加以修改
参考:
https://blog.csdn.net/u010801994/article/details/84345247
https://blog.csdn.net/hejingkui/article/details/80488763
应用opencv参考代码的例子 https://blog.csdn.net/a864488081/article/details/78205519