一、初步认识
KWP 2000和IS0-14230
在汽车故障诊断领域,针对诊断设备和汽车ECU之间的数据交换,最早欧洲出现了一种标准诊断协议KWP2000(Keyword Protocol 2000),又名关键字协议。
那时候KWP2000是基于K线的诊断协议,(一条线K,或者两条线K和L)那具体KWP2000协议是什么?这时候就要讲讲ISO-14230协议。
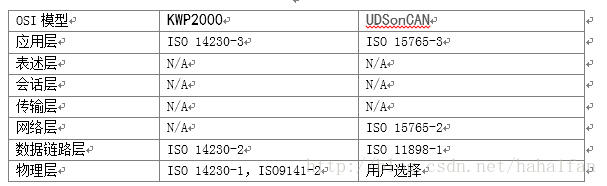
当时的KWP2000只三个子层有定义说明,即:应用层、数据链路层和物理层。并且这三个层都由ISO-14230-1、ISO-14230-2、ISO-14230-3定义标准,所以一直都这么说,ISO-14230就是KWP2000。
ISO-14229和UDS
先知道一件事,ISO-14229协议就是UDS(Unified diagnostic services),这个标准定义了诊断的应用层服务,不基于任何底层标准。它是诊断服务的规范化标准,比如读取故障码应该向ecu发什么指令,读数据流又是发什么指令等…
ISO-15765 和UDSonCAN
由于K线物理层和数据链路层在网络管理和通讯速率上的局限性,使得K线无法满足日趋复杂的车载诊断网络的需求。这时候CAN总线出现并代替了K线,也就是我们说的ISO-15765。ISO-15765是基于CAN,它的ISO-15765-2、ISO-15765-3定义了诊断数据网络层和应用层的定义标准。
又因为ISO-15765-3使用了ISO-14229(UDS)的诊断服务,所以ISO-15765也叫UDSonCAN。
再看他们的关系
又有人把ISO-14230称为基于K线的KWP2000协议,把后面发展称为Can线的ISO-15765称为基于基于CAN的KWP2000协议。
其实都可以,不混淆就行,基于K线的KWP2000协议就是ISO-14230,基于CAN的KWP2000协议就是ISO-15765或者UDSonCAN!!!!
二、1. KWP 2000协议
KWP 2000协议是最常用的通信协议之一,又称为关键字协议,因为这种协议在系统进入时,会涉及到关键字的校验而得名。K线KWP2000协议是异步半双工进行通讯的,通常采用10416BPS的波特率;空闲电平通常为12V。其实很简单,就是用一条K线进行数据通讯,然后制定一些协议而已。下面系统初始化进入、帧结构、命令交互、交互时间参数、常用命令字等几个方面来介绍这种协议。
1、系统进入初始化
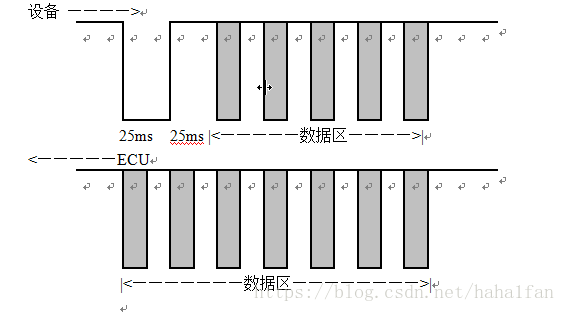
有两种初始化方式,主要是用第一种初始化。由设备先发送25ms的拉低电平,然后是25ms的高电平(空闲电平),然后再发送系统进入数据,系统进入数据通常为5个字节,ECU响应7个字节,完成系统初始化交互。请参见下图:
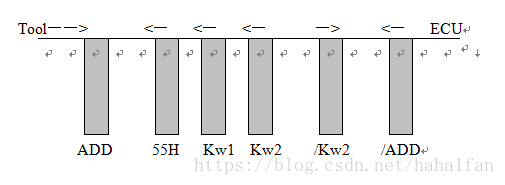
第二种初始化方式为设备发送5BPS或者200BPS的地址码,ECU响应55H,KW1,KW2,设备对KW2取反发回给ECU,ECU对地址码取反发回给设备,完成系统初始化交互。其中55H这个字节用来规定后面的通信波特率。参见下图
2、帧结构
命令头(1个或多个字节)+命令体(1个或多个字节)+校验(通常为和校验)
在命令头中,包括以下几个部分的内容:格式+目标地址+源地址+长度字节。长度信息有时候在格式字节中体现,则不需要另外的长度字节,长度信息用以表示命令体的内容;目标地址和源地址有时候也会没有。
命令体的内容中:命令字+命令内容。命令内容可以没有。
举例如下:
81H 11H F1H 81H 04H
第一个字节81H为格式+长度信息(80+1)
第二个字节11H为目标地址
第三个字节F1H为源地址
第四个字节81H为命令字,表示系统进入
最后一个字节04H为前面4个字节的校验和
同样,也可能表现如下:(命令字)
80H 11H F1H 01H 3EH C1H
这种情况下,长度字节放在源地址之后
还可能表现为:
02H 1AH 9AH B6H
这种情况下,格式字节和目标地址源地址都已经没有了
还有一种特殊的情况,在上一种情况的基础上,在帧数据之前,加一个00,例如:
00H 02H 1AH 9AH B6H
但这种帧结构的情况极少
3、命令交互
命令交互通常情况下为1对1,但也存在1对多或者多对1的情况。下面是一组命令交互举例:
Tools: 81H 31H F1H 81H 24H
ECU: 83H F1H 31H C1H E9H 8FH DEH
在交互中,因为发送命令的对象不一样,所以目标地址和源地址是进行了互换;
同时,ECU响应设备的命令字在设备命令字的基础上 + 0x40(肯定回答)
还有否定回答,即回复 7F
Tools: 0x81, 0x11, 0xF1, 0x81, 0x04,
ECU: 0x83, 0xF1, 0x11, 0x7F, 0x81, 0x21, 0xA6,
4、交互时间参数
设备发送命令字节间的时间间隔P1,通常为5ms
ECU返回命令字节间的时间间隔P2,通常为0ms
设备发送完一帧命令后等待ECU响应的时间P3,通常为75ms~90ms
设备接收到ECU响应后到发送下一帧命令的时间P4,通常为20ms~26ms
5、常用命令字
系统进入:81H
系统退出:82H
链路保持:3EH
读故障码:18H
清除故障码:14H
读版本信息:1AH
读数据流:21H
6、实训
从最底层开始,直接看K线的电平变化吧
截一段设备向ECU发送请求的数据:
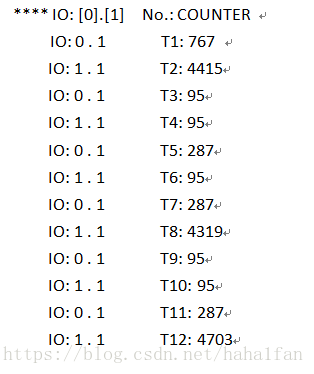
IO[0]:用作K线通讯发送和接收数据的端口,变化电平高低(1,0)表示数据位的值
T:表示电平持续的时间
一个数据位的时间 = 1/波特率即: 1 / 10416 = 95 ns(约等于)
那就简单了,把上面电平持续时间时间除以95,可以得出K线的电平变化情况:

单位:一个数据位的时间单位
发送一字节的数据表示方法:
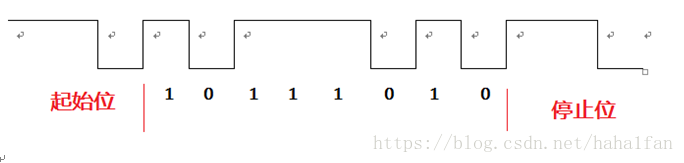
很容易看出,这个设备发送命令字节间的时间间隔P1,为4.5ms
所以解析一下电平图代表的数据实际是:
向ECU发送请求的数据为:0x80,0x11,0xF1,0x01
意思:设备请求和ECU建立连接
随便再搞一段ECU返回设备的数据:
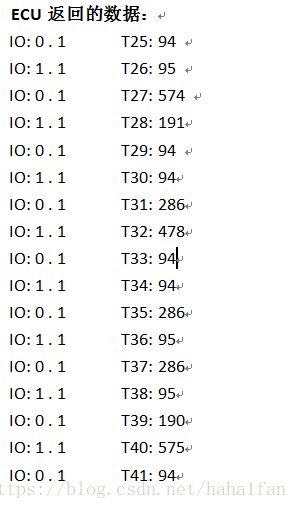
电平持续时间时间除以95,可以得出K线的电平变化情况:

可知ECU返回命令字节间的时间间隔P2,为0ms
ECU返回设备的数据为:0x81,0xF1,0x11,0x7E,0x01
意思:ECU返回链路保持
作者:爱面条的可达
来源:CSDN
原文:https://blog.csdn.net/haha1fan/article/details/78007839
版权声明:本文为博主原创文章,转载请附上博文链接!